 如何利用紫外激光加工技术制造可拉伸的多传感器阵列
如何利用紫外激光加工技术制造可拉伸的多传感器阵列

近年来,软体机器人领域取得了巨大的进展。尤其是软体机器人手已被证明可以抓取甚至操纵形状复杂、易碎或易变形的物体,解决了传统的刚性机器人长期面临的挑战。基于这些功能,软体机器人已成为工业、人机交互和医疗应用的理想解决方案。然而,由于缺乏合适的传感系统,它们的性能受到一定阻碍。因此,开发用于软体机器人手的传感器仍然是关键一环。
用于软体机器人手的传感器网络需要具备可拉伸性和柔性,能够贴合柔软表面并随其移动,并且传感器信号不受应变影响。虽然柔性传感器网络研究近期已取得一定进展,但在制造成本、复杂性、定制化需求以及传感器集成等方面,仍存在较大挑战。此外,为了避免污染,食品处理和人机交互等应用还对传感器提出了易于更换(最好是一次性)的要求。
据麦姆斯咨询报道,近期,斯坦福大学(Stanford University)、国立首尔大学(Seoul National University)的研究人员提出一种柔性、可拉伸的多模态传感器网络,可与软体机器人手集成。该传感器网络制造和集成复杂性较低,成本接近于一次性用品,并且易于更换。该项工作中,研究人员展示了如何利用紫外激光加工技术来制造可拉伸的多传感器阵列,从而解决软体机器人和假肢应用等问题。相关研究成果已发表于npj Flexible Electronics期刊。
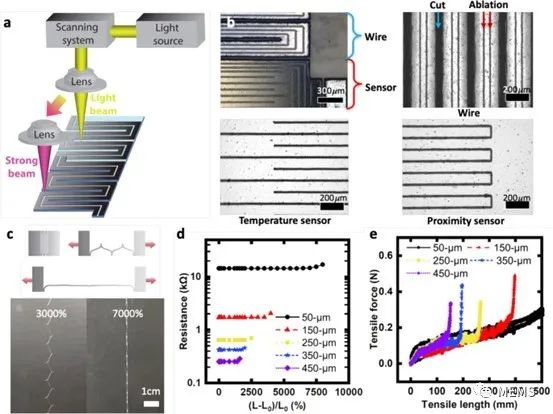
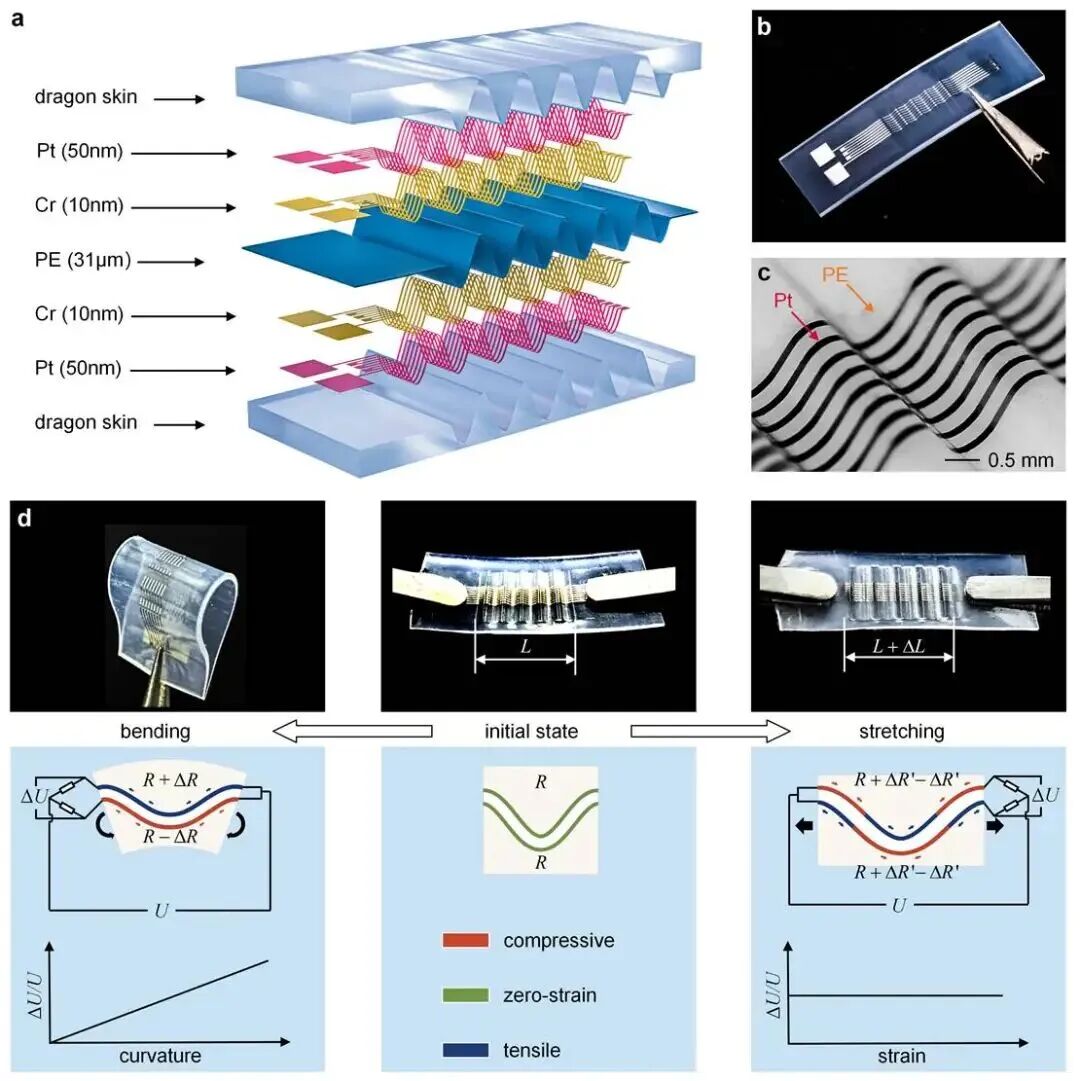
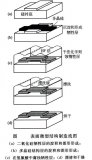
研究人员使用金属化塑料薄膜,通过紫外激光进行图案绘制和切割加工,实现低成本制备可拉伸的传感器网络。基于该设计加工策略,3分钟内可以在50 × 50 mm的传感器网络上制造多个传感器和线束,金属化塑料薄膜的成本仅为0.005美元。通过改变光束参数(功率、频率、占空比、速度),可以在柔性导电薄膜的每个金属和塑料层上绘制不同的特征。通过拉伸切割图案,可以将其包裹在各种形状的商用软体机器人表面上,轻松实现集成。通过修改模式尺寸,可以针对具有不同动态范围、空间分辨率和传感元件的不同应用进行缩放和定制。
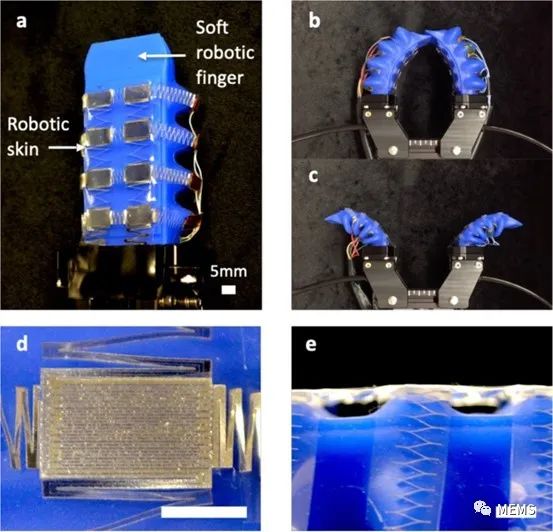
基于此,研究人员制备了机器人皮肤,它由可拉伸Kirigami线迹连接的传感器组成,嵌入在透明、柔软且可拉伸的硅胶表皮中,然后被拉伸包裹在柔软的机器人手指上,当手指弯曲和伸展时都不会出现褶皱。该项研究中展示的传感器网络由4个温度传感器、4个接近感器组成,通过互连提供8个信号和2根接地线连接到机器人手指背部。
集成激光加工的Kirigami传感器网络的软体机器人手
传感器网络的制造和表征
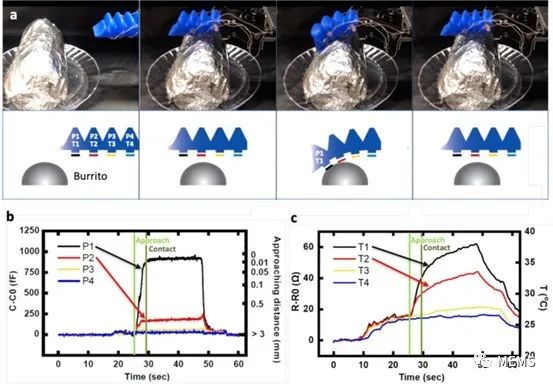
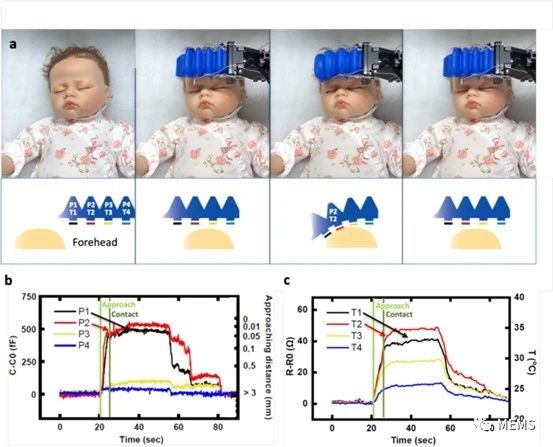
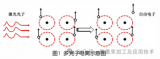
通过将传感器网络包裹在软体机器人手上,研究人员展示了其用于食物处理和医疗应用的可行性。接近传感器用于在不接触物体的情况下检测正在靠近的物体,从而避免物体磨损或损坏。在食物处理实验中,当接近感应显示软夹持器接触时,它会停止抓取并保持在当前位置,同时温度传感器开始测量温度。此外,接近和温度传感的结合对于软体机器人与人类交互时非常有用,它能够使机器人对人进行温和接触,并能区分生命体的和非生命体表面,甚至可以检查体温是否升高。
使用接近和温度传感的食品处理演示
软体机器人的人机交互演示
研究人员称,未来计划在传感器网络中集成更多其他类型的传感器,例如,原位制造的应变传感器用于本体感知,采用微结构电介质的边缘场传感器用于实现接近和压力组合传感。此外,为薄膜添加XY载物台或进纸辊,将允许激光绘制并切割更大的区域。例如,一个由10 × 20个传感器和线束组成的阵列,在未展开状态下为155 × 200 mm,展开后可以扩展覆盖到一个520 × 1640 mm的软体机器人手臂表面。相关研究将推动软体机器人在更多场景发挥重要作用。
审核编辑:郭婷
-
传感器
+关注
关注
2578文章
55771浏览量
795101 -
机器人
+关注
关注
214文章
31611浏览量
224320 -
激光
+关注
关注
21文章
3723浏览量
69887
原文标题:紫外激光加工的可拉伸多模态传感器网络,用于软体机器人交互控制
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
AI服务器PCBA加工技术解析:高算力时代的核心制造能力
电子科技大学:研究用于机器人仿生皮肤的三维可拉伸触觉传感器

飞秒激光微加工引领2026集成电路制造 转向超精密时代的战略跃迁
UV紫外激光打标机-视觉定位电子元件二维码打标机

工业激光传感器:智能制造时代的“精度先锋”


中国科学院:在可拉伸曲率传感器方面取得进展
纳米加工技术的核心:聚焦离子束及其应用
海绵拉伸撕裂强度试验机中传感器的电子信号处理技术
Akribis的SGS激光微加工系统
智能网版测试仪应用 | 可拉伸电子器件的丝网印刷

全面解析直线电机模组在激光加工中的优势与应用



评论