 一文读懂LiDAR激光雷达传感器(全网最全知识)
一文读懂LiDAR激光雷达传感器(全网最全知识)
LiDAR传感器(一)-概述
LiDAR(light detection and ranging)激光雷达是一种非接触式探测和测距方法。该技术通过发射光脉冲击中附近物体后测量反射回波信号的特性来精确地计算每个物体的距离。LiDAR传感器可以用作点状距离测量系统,用来实现目标的距离测量(一维结果);也可以让测量光束在某一平面上旋转或者移动,用来获得距离和角度数据,从而提供测量目标的二维结果;也可以通过采用多个传感器,形成同时扫描多个层面的传感器阵列,从而测得X,Y,Z的点云数据(三维结果)。
LiDAR被广泛应用在地形建模(例如:立体制图、采矿、林业、考古学、地形测量),近年来Lidar也被应用在无人驾驶以及消费电子中。
LiDAR在地形建模上的应用
LiDAR系统根据载体的不同,分为星载、机载和地面三种模式。
其中,星载和机载LiDAR多用于中、小比例尺地形测量,如1:50000、1:100000等地形图绘制等。
机载LiDAR系统沿航线采集地面点三维数据之后,可生成LiDAR数据影像和地面高程模型。在不同的实地条件下, LiDAR系统的平面精度可达到0.15 至1米,高程精度可达到0.1米,间隔可达到2-12米。机载LiDAR可应用于快速获取大范围林业信息,如树木定位、树高计算等;也能够应用于矿业领域,快速获取矿山的复杂表面和高危区域的空间三位信息,为矿山地形测量和数字矿山的建设提供了新的技术手段。

2003年,NASA根据早先提出的采用星载激光雷达测量两极地区冰面变化的计划,正式将地学激光测高仪列入地球观测系统中,并将其搭载在冰体、云量和陆地高度监测卫星上发射升空运行。 而地面LiDAR适合更精细、更高精度的复杂地物量测,如古建筑的三维城市建模、复杂场馆测量等。
LiDAR在消费电子中的应用
LiDAR在消费电子中的应用主要分为以下三部分。
AR应用:凭借激光雷达快速测距特性,可让设备快速进入AR应用环境,减少等待时间;同时由于激光雷达更精准的测距表现,可以让AR应用虚实结合更逼真,提供更良好的遮挡表现等等;
优化拍照:由于可以测量环境距离,就可提升低光环境的自动对焦速度。
3D扫描:基于高精度测距,可以呈现细节更良好的3D扫描效果。搭载有LiDAR的智能手机和平板电脑成为3D扫描的工具,比如用于家庭布局的扫描从而对家庭装修做出优化,或者将扫描的风景应用于社交媒体或者新闻业领域。

LiDAR在自动驾驶中的应用
在环境感知中,每一种传感器都有独特的优势和劣势。例如,毫米波雷达可靠性高,可以探测物体距离与速度,不受天气影响可全天候全天时工作,但分辨率不高,不能区分人和物;而摄像头很高的分辨率,能够识别颜色和字体,有助于检测道路标志、交通信号灯以及行人,但受黑夜、强光影响较大;激光雷达则能够提供三维感知信息,对环境的重构能力强,可进行实时定位和高精度障碍物的分类和检测,但受天气环境影响大。这三种传感器各有优劣,既难以互相替代,又缺一不可。随着自动驾驶不断向更高智能化、自动化等级发展,集成在汽车上传感器数量和种类将不断增加,业界普遍认为“传感器融合(sensor fusion)”可显著提高系统的冗余度和容错性,从而保证决策的快速性和正确性,是实现高度自动化驾驶安全性的关键。
LiDAR传感器(二)-构成
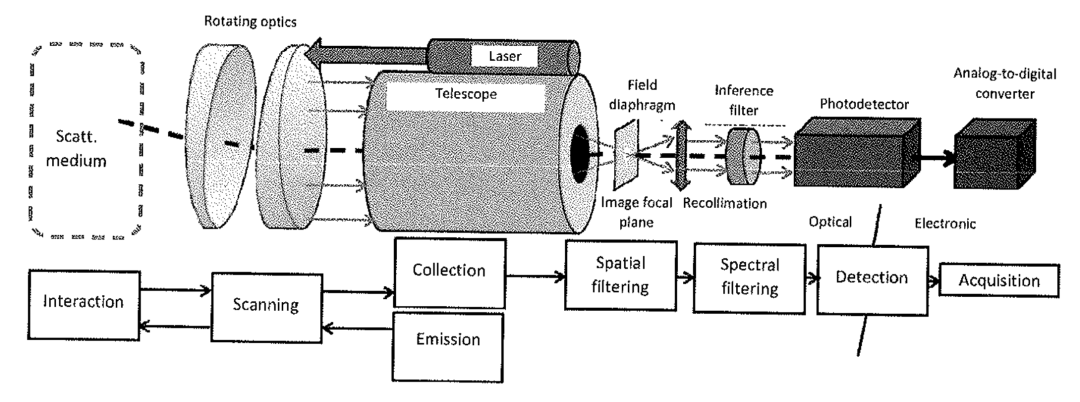
LiDAR(light detection and ranging)激光雷达是一种非接触式探测和测距方法。该技术通过发射光脉冲击中附近物体后测量反射回波信号的特性来精确地计算每个物体的距离。它是由以下部件组成的传感器系统;激光器(laser)发出特定波长的激光,经过旋转机构(scanning)实现区域的快速扫描,反射回来的激光经过滤光片(spatial & spectral filter)滤除环境干扰,最终通过光电检测器(photodetector)将光信号转换成易测量的电信号进行检测。
LiDAR一般由以下几个部分构成
激光器(Laser)
旋转机构(scanning)
滤光片(spatial & spectral filter)
光电检测器(photodetector)
1. 激光器(laser)
激光器是激光雷达中的激光发射装置。常用的激光器有以下三种类型
激光二极管是常用的激光源,其结构紧凑,通常情况下其发出的波长为905nm。激光二极管通常用在激光测距仪中,但是由于其发射能量有限,采用此激光器的LiDAR的测试范围为几百米。
光纤激光器在近红外区可以产生1064nm(镱)和1550nm(铒)的激光,光纤激光器结构紧凑而且发射能量比激光二极管更高,可达到几百微焦。
Nd:YAG晶体激光器可以同时实现高发射能量(几毫焦)和短的脉冲时间(ns级),非常适合用于dTOF的长距离测量。最常见的发射频率对应的激光波长为1064nm,也可以将频率翻倍(2倍或3倍)来得到532nm(可见光)波长的激光和355nm(UV)波长的激光。不过,此类激光器的体积会更大而且必须有主动散热的器件。
| Technology | Wavelength |
Energy |
repetition frequency | Pulse duration |
| 激光二极管 | 905nm | <10μJ | several KHz | 30-200ns |
| Er光纤激光器 | 1550nm | <400μJ | several 10 KHZ | 5-100ns |
| Yb光纤激光器 | 1064nm | <200μJ | several 10 KHZ | 5-100ns |
| DPSS Nd:YAG | 1064,532,355nm | <60,30,10mJ | <100HZ | 5-10ns |
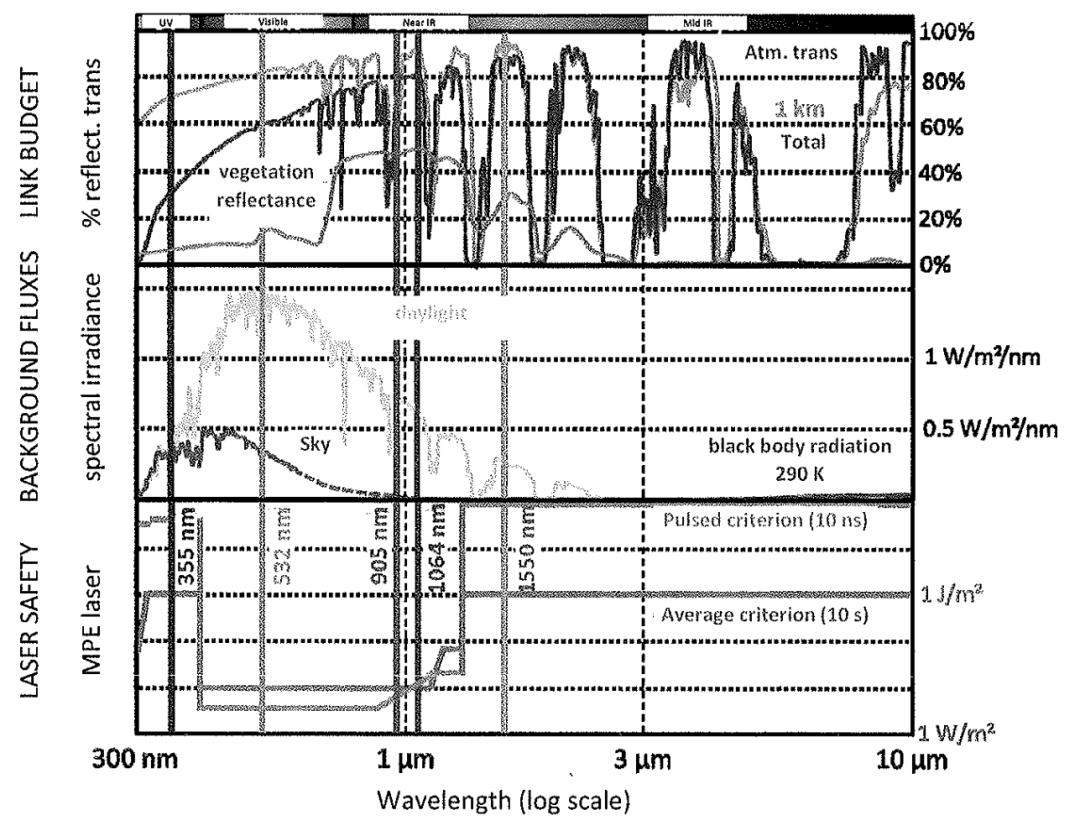
激光器的选择需根据使用场景来选择,例如用于林业探测的机载Lidar,发射波长的选择取决于大气透射率以及植被反射率;而测深测绘通常采用蓝绿色波长的激光,该波长对水的穿透性有利于准确的测量。同时还需要考虑整体装置紧凑性、稳定性、发射能量、人眼安全性等方面的要求。
在林业测量领域,从energy link budget(确定的发射能量下,收到的信号的能量大小)考虑,由于大气的散射率以及植物对光的吸收率都和波长强相关,近红外的波长比UV波长的光更有优势。
在LiDAR使用过程中,太阳光或者其他热辐射也会直接或通过散射进入激光检测器,形成背景噪声。环境热辐射在近红外区的占比很低,因此1550nm的激光器受背景噪声的干扰最小。
EN 60825-1 标准规定了眼睛允许的极限激光辐射值,该值随波长的变化而变化。波长在310nm至400nm,以及高于1400nm时,眼睛能承受的最大激光辐射值更高。
2.旋转机构(sacnning)
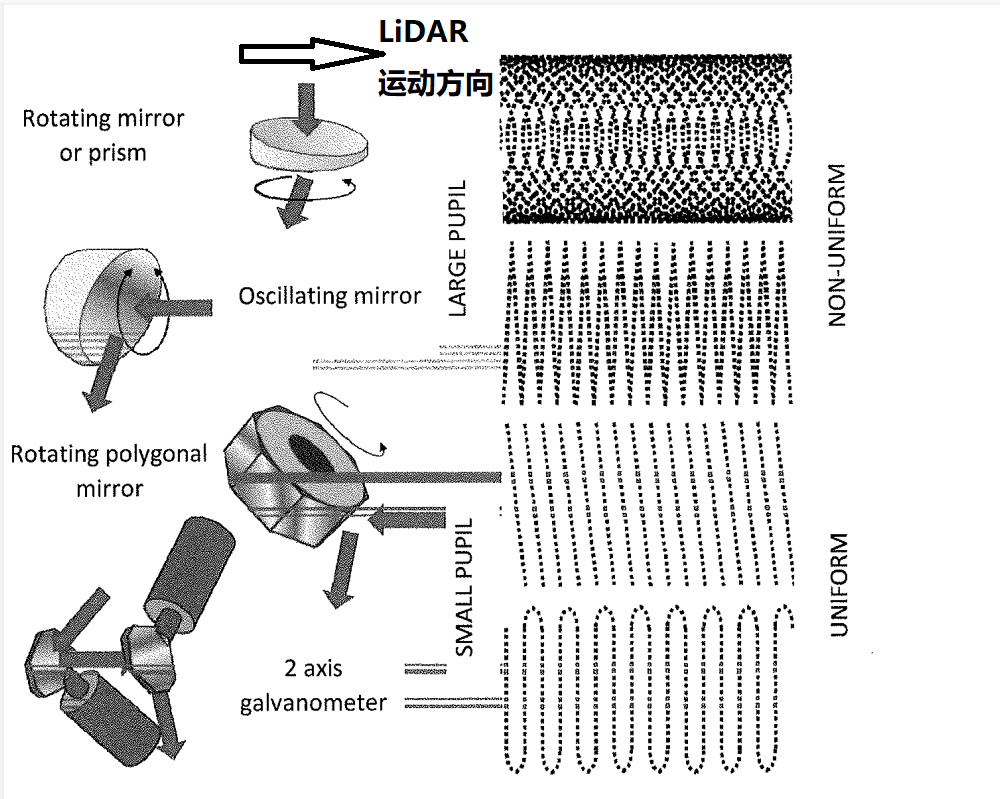
为了对大范围区域进行迅速的激光扫描,通常需要使用旋转机构来改变激光的测量方向。最终得到的点云密度和旋转机构的旋转速度以及激光器的repetition frequency有关。
不同的旋转机构得到的点云扫描轨迹也不一样。以机载LiDAR为例,简单的旋转镜或者是摆动镜无法得到均匀的点云扫描轨迹,而旋转多面镜和两轴镜可以得到均匀的点云扫描轨迹。
3.滤光片(spatial & spectral filter)
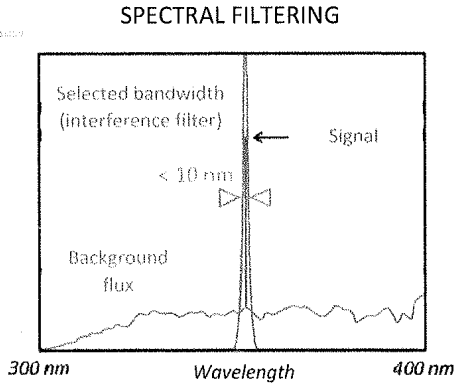
由于白天环境光在全波长范围内均会产生背景噪声,可以通过滤光片在空间和波长上对背景噪声进行滤除。
spatial filter可将后续激光检测器的视场精确地限制在激光束行进的空间内。
spectral filter用来约束进入激光检测器的光的带宽,从而滤除背景噪声,spectral filter的带宽一般在0.5-10nm的范围内。当入射光线不是垂直入射spectral filter时(设定垂直入射时θ=0),由于偏移角度的影响,波长会发生偏移,λc,θ=λc,θ * cosθ。由于可通过滤光片的波长带宽有限,因此滤光片的入射角度会有限制,角度限制为Δθ=2(Δλ/λc);Δλ为滤光片的带宽。例如;1nm带宽的近红外(1064nm)滤光片,入射角度变化只允许在±1.5°。
4. 光电检测器(photodetector)
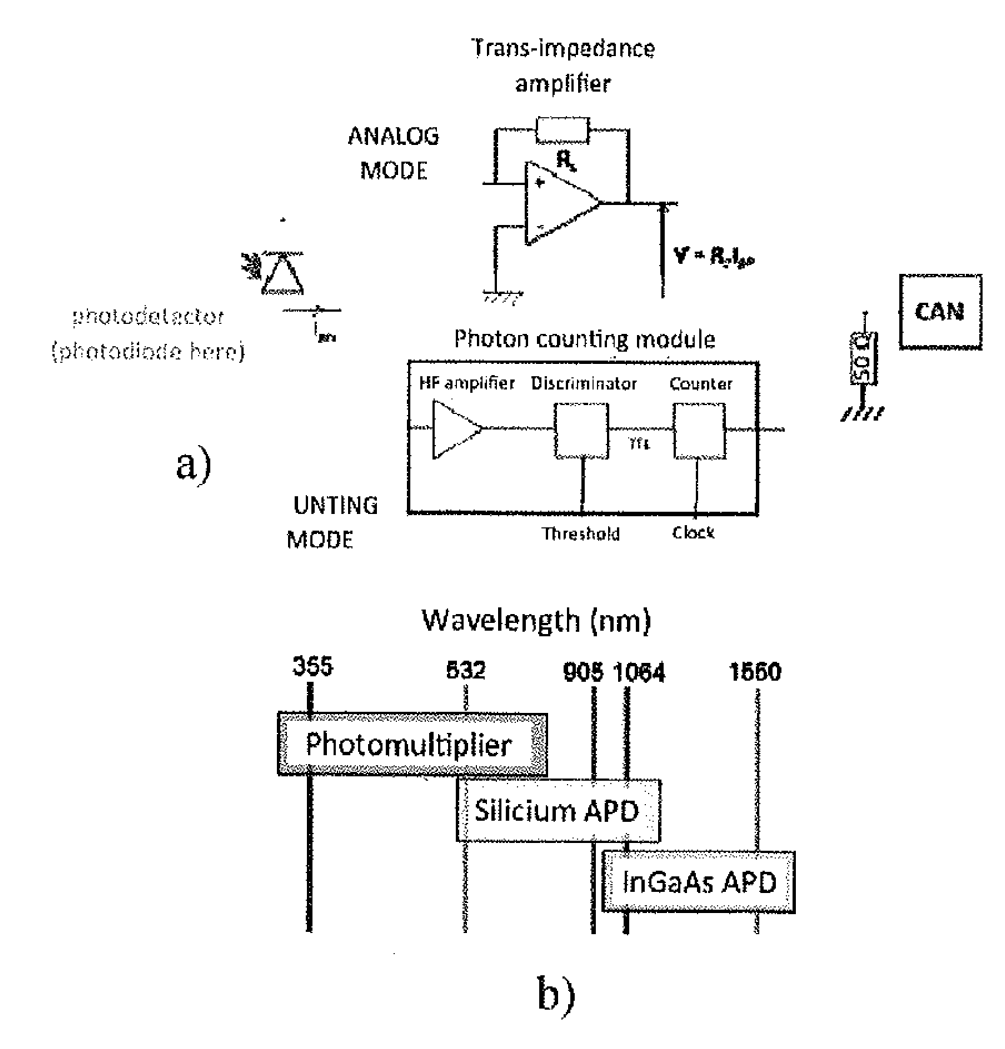
激光检测器检测从目标物体反射回来的激光脉冲,将光信号转换成易测量的电信号。
不论是雪崩光电二极管(检测近红外波长),还是光电倍增管(检测可见光/UV光),都会通过放大器放大信号(每入射一个光子,可以产生10-10000个电子)。需要用放大器放大信号的原因是避免太小的模拟信号在后续的ADC转化过程中淹没在了量化噪声中。
光电检测器的选型也会影响LiDAR的空间分辨率,当光电检测器需要的检测时间长时,空间分辨率会降低。
总结如下:
| component | 作用 | 备注 |
| Laser | 发射激光 |
不同的应用场景会选择不同的激光波长(环境对于光的吸收率和波长有关,环境热辐射的分布和波长有关,人眼能承受的最大激光能量和波长有关) 不同的应用场景会选择不同发射能量的激光器 不同的激光器的尺寸大小不一样,有些激光器需要主动散热装置 不同激光器的repetition frequecy会影响点云密度,即空间分辨率 |
| Scanning | 完成对整个区域的快速扫描 | 不同的旋转机构获得的点云扫描轨迹不一样 |
| Filter | 滤除环境带来的背景噪声 | spectral filter允许的入射角度和其带宽有关 |
| Photodetector | 将反射回来的光信号转化为易测量的电信号 |
需要放大器放大信号,避免在ADC转化过程中信号淹没在量化噪声中 会影响LiDAR的空间分辨率 |
LiDAR传感器(三)-原理
LiDAR(light detection and ranging)激光雷达是一种非接触式探测和测距方法。该技术通过发射光脉冲击中附近物体后测量反射回波信号的特性来精确地计算每个物体的距离。其测距原理可分为以下三大类
三角测距法
dTOF测距法
iTOF测距法
1. 三角测距法
激光器发射激光,在照射到被测物体上后,发射回来的光线被CCD接收,按照光学路径,不同距离的被测物体将会成像在CCD上的不同位置。按照相似三角形的公式计算,即可得到被测物体的距离。
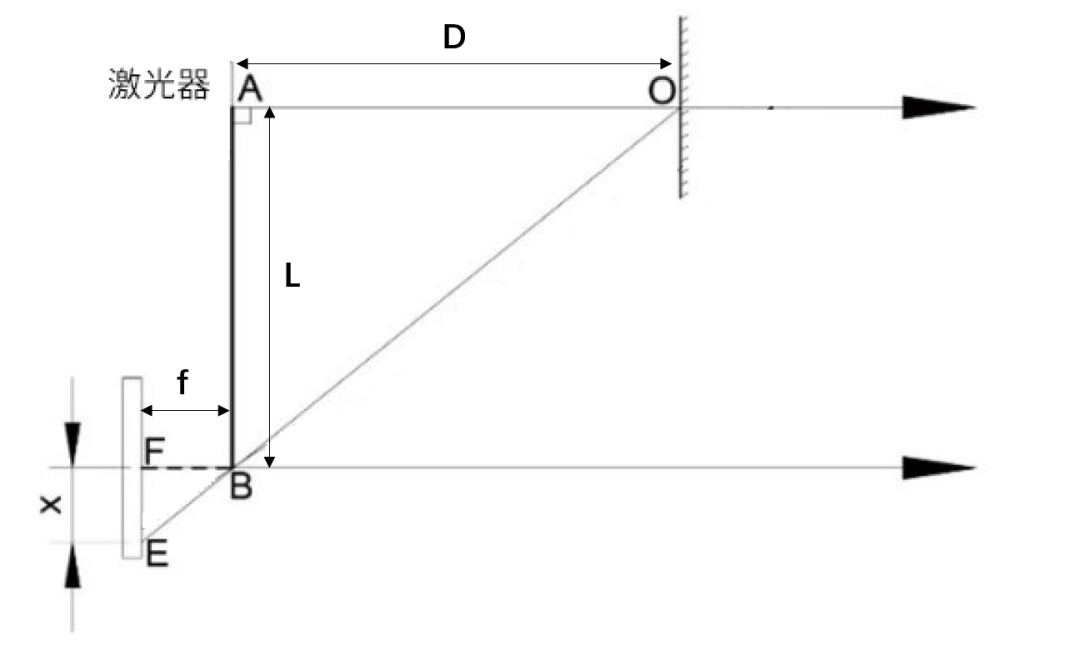
上图中A为激光器,O为被测物体,B为接收透镜,f为接收透镜和CCD之间的间距,L为发射透镜光路光轴和接收透镜主光轴之间的偏移,X为在接收CCD上的位置偏移。
距离D=f*(L/X)
三角法测距的分辨率可以通过下面的公式推导:
当CCD的感应分辨率为δX=X1-X2时,测距分辨率为
δD=D2-D1=f*(L/X2)-f(L/X1)=f*L(X1-X2)/X1/X2
由于X1和X2的差值很小
δD≈f*L*δX/(X^2)
由于D=f*(L/X),即X=f*L/D
δD≈f*L*δX/(X^2)=D^2*δX/(fL)
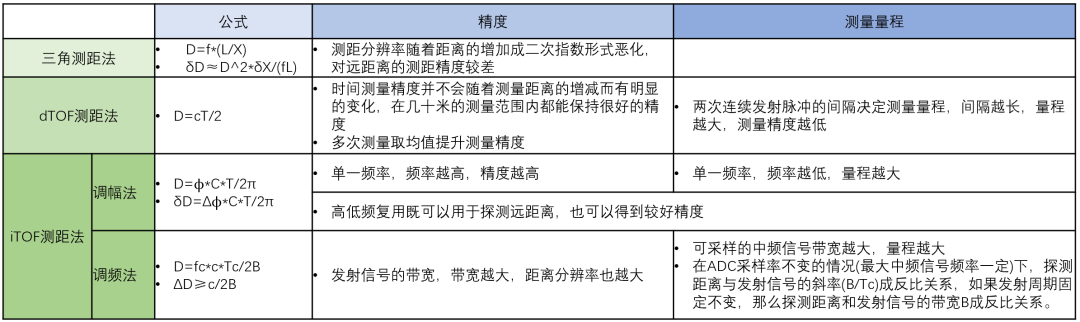
测距分辨率随着距离的增加成二次指数形式恶化,因此三角法测距对远距离的测距精度较差。故三角法测距的LiDAR在标准精度时往往采用百分比进行标注(如1%,即为在20m的测量距离时最大误差为20cm)
2.dTOF测距法
dTOF(direct Time-of-Flight)测距的核心原理是激光器对被测物体发射一束时间极短的激光,通过直接测量激光发出,达到被测物体再返回到光电探测器的飞行时间,来计算被测物体的距离。
由于光的速度极快,因此该方案需要一个高精度的时钟电路(通常是ps级)和脉冲时间极端的激光发射源(通常为ns级)。
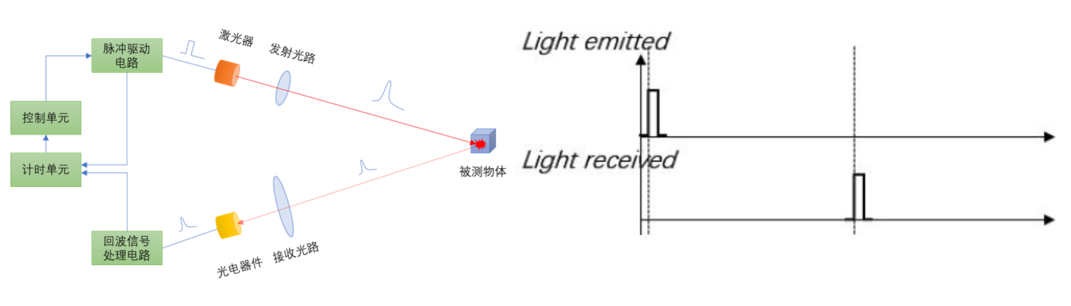
测距开始时,脉冲驱动电路驱动激光器发射一个持续时间极端但瞬时功率非常高的光脉冲,同时计时单元启动计时;光脉冲经发射电路发出后,达到被测物体表面并向各方向散射;接收光路收到部分散射的光,通过光电器件将光信号转化成电信号,输送给回波信号处理电路;回波信号处理电路将光电流转化成电压信号,用于触发计时单元停止计时。即可得到激光飞行时间T,从而计算出被测物体的距离:
D=cT/2, c为光速
dTOF LiDAR的原理为计算飞行时间,时间测量精度并不会随着测量距离的增减而有明显的变化,因此大多数dTOF雷达在几十米的测量范围内都能保持厘米级的精度。
dTOF还可以通过在单次测量时间内发射和接收N次光信号,然后对记录的N次飞行时间做直方图统计,用其中出现频率最高的飞行时间来计算被测物体的距离,从而来减小测量误差。
对于dTOF而言,当测量距离较远时,光飞行一个来回的时间如果超过了两次连续发射脉冲的间隔,传感器在发射第二个测量信号后,才会接收到第一个测量信号的反射波,就会把该反射波误认为是第二个测量信号的近距离反射波,这时就会出现相位模糊现象。在测量远距离物体时,可以减少测量次数,适当增加两次测量之间的间隔,从而避免相位模糊的问题。但是,减少测量次数会同时降低测量精度,相当于用精度换取有效探测距离。
dTOF除了对时钟电路以及激光源有着非常高的要求,对回波产生的脉冲信号的精度也有很高的要求(普通的光电二极管难以满足这样的要求,满足要求的SPAD-signal photo avalanche diode的生产制作工艺复杂)。因此有更多的厂商在研究推广iTOF。
3. iTOF测距法 3.1 调幅法
iTOF(indirect Time-of-Flight)测距中常用的方法为相位式激光测距。
相位测距是将发射的连续的激光进行幅度调制(调制光的光强随时间做周期性变化),被测量物体发射后,激光产生相位变化。根据相位差可以间接的测量时间和距离,比dTOF直接测量时间所需的器件要求有所降低,信号处理难度也降低了很多。
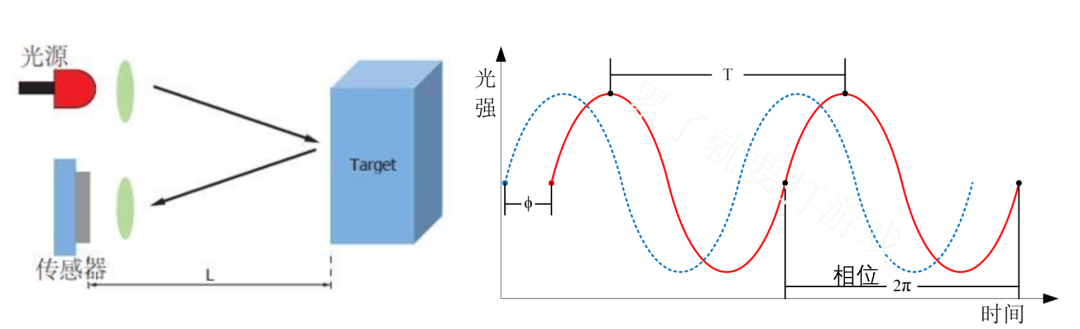
检测出接收波和发射波之间的相位变化ϕ后,即可得到被测物体的距离D
D=ϕ*C*T/2π
C:光速
T:调制信号的周期时间
在实际的单一频率测量中,只能分辨相位小于2π部分而无法得到超过一个周期的测距值。所以,在测量时需要根据最大的测量量程来选择调制频率,例如当选择调制的信号频率为100KHz时,所对应的测量量程就是1500m。
当所设计的系统测相位分辨率一定时,距离的分辨率δD=Δϕ*C*T/2π,即选择的频率越大,所得到的距离分辨率就越高。所以在单一调制频率下,大量程和高精度是不能同时满足的。
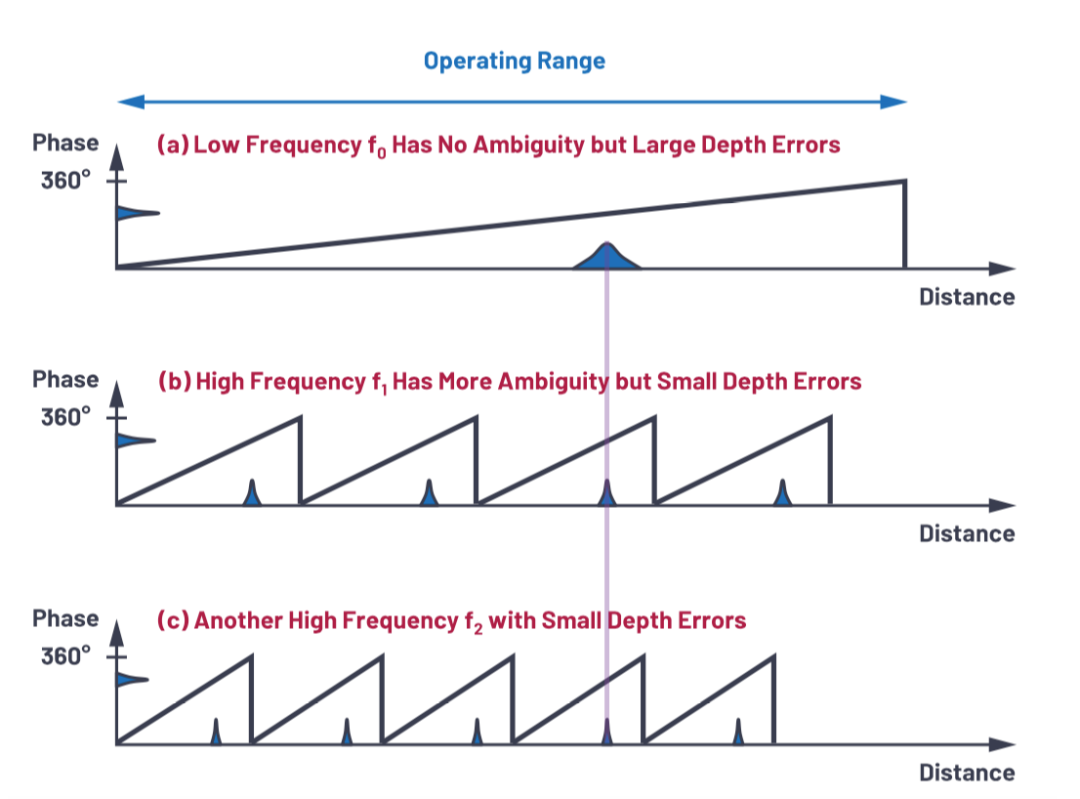
低频调制对应于远距离的测量,但是精度较差;而对于高频调制对应于近距离测量,精度较好。因此,高低频复用既可以用于探测远距离,也可以得到较好精度。如下图所示,可以使用几个不同的调制频率去确认哪个距离才是真实的距离,这种方法低调制频率的部分可以提供无歧义的距离估计,而高调制频率的部分可以提供更高的精度,兼顾了测量距离和测量精度的需求。
由于相位式测距发射的激光为连续波,这使得它的平均功率远低于脉冲激光的峰值功率,因而无法实现远距离目标的探测,通常适用于中短距离的测量,测量精度可达毫米、微米级。
相位法激光测距的精度主要取决于相位测量的精度,目前的相位测量主要基于数字DSP实现,即不是鉴别单一时刻的相位,而是通过FFT(傅里叶变换)去鉴别两端信号的相位,这样可以充分抑制噪声的影响,提高相位测量精度。
3.2 调频法
除了调幅(AMCW)式LiDAR,在汽车领域经常使用调频(FMCW)LiDAR进行距离和速度的测量。
下图为频率调制的连续波雷达,第一个是时域信号,第二个是频率信号,可以看出调频信号的频率和信号的持续时间Tc是呈线性关系,因此这样的调频连续波又称为线性调频连续波(LFMCW)。
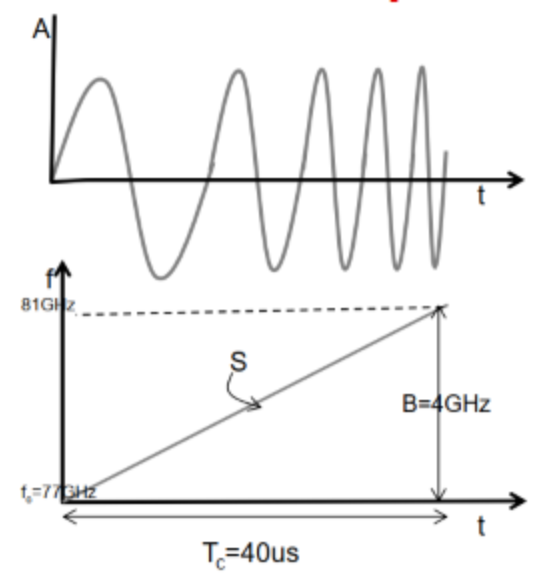
上图中B为带宽(bandwidth:信号连续频带中最高和最低频率之间的差值),Tc为信号持续时间,S为信号斜率(S=B/Tc)。
调频LiDAR的基本原理如下图所示,发射信号和回波信号之间的频率差称之为中频信号IF(intermediate frequency),这里的中频信号是一条直线,表示频率单一,测量目标的距离不一样,返回的时间也就不一样,因此中频信号的平吕也就不一样。所以可以说距离和中频信号是成正比相关的。
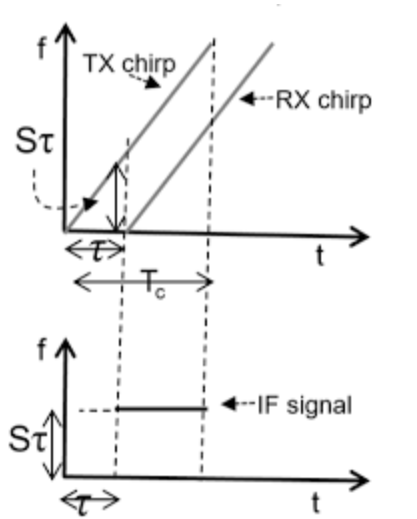
测量的距离D可通过下述公式计算出
D=c*τ/2
中频信号的频率 fc=S*τ=B*τ/Tc
即
D=fc*c*Tc/2B
其中c为光速,fc为中频信号频率,Tc为信号持续时间,B为带宽。
由于中频信号还是模拟信号,要进行计算还需要经过ADC转换成数字信号送入处理器。由于ADC的采样频率有限制,所以中频带宽会受ADC的采样频率所限制。由公式D=fc*c*Tc/2B可知:在ADC采样率不变的情况(最大中频信号频率一定)下,调频LiDAR的探测距离与发射信号的斜率成反比关系,如果发射周期固定不变,那么探测距离和发射信号的带宽成反比关系。
Lidar需要具备区分两个距离非常近的目标的能力,例如,当雷达的距离分辨率为4m时,它就不能分辨相距1m的行人和汽车。
假设了两个相距很近的目标,被雷达探测到,两个回波信号和发射波形混频后就得到了两个中频信号,这两个中频信号的时间T相差很小,因此中频信号的频率相差很小。
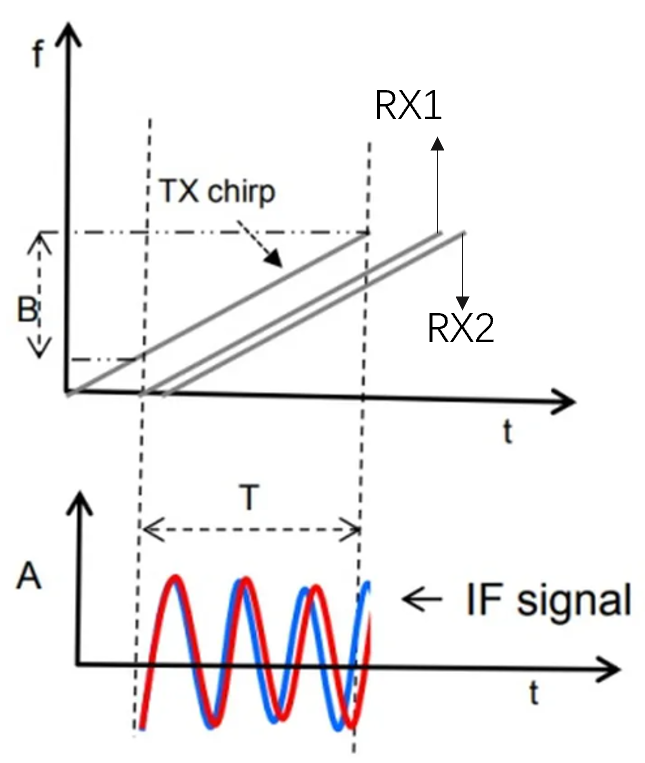
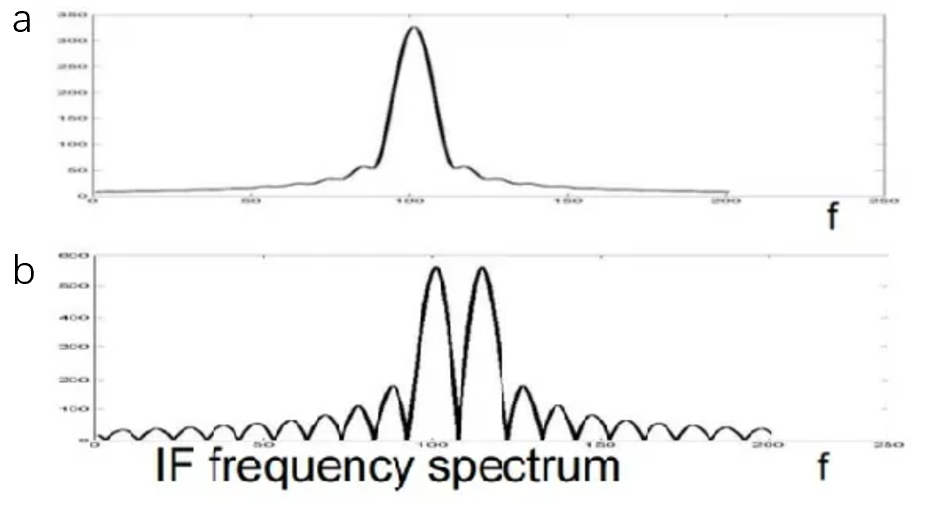
通过傅里叶变换可以将时域信号转换为频率信号,从而得到中频信号的频率。如下图a所示,如果LiDAR的频率分辨率较差,即两个目标的频率信息难以分辨,则无法分辨两个相近的目标;如下图b所示,如果有能力分辨两个物体,则可在频率信息中看到两个分离的频率峰。
根据傅里叶变换的频率分辨公式可知,频率分辨率
Δf=fs/N=1/(Nts)=1/T
其中fs为采样频率,N为采样点数,ts为采样间隔,fs=1/ts,Nts就是采样前模拟信号的时间长度T,所以信号长度越长,频率分辨率越好。
在FMWC LiDAR中采样的时间长度为Tc,即
Δfc≥1/Tc
Δfc=2BΔD/(c*Tc)
即:
2BΔD/(c*Tc)≥1/Tc
ΔD≥c/2B
故FMWC LiDAR的距离分辨率取决于发射信号的带宽,带宽越大,距离分辨率也越大。而当带宽一样时,无论信号持续的时间如何变化都不会影响LiDAR的距离分辨率。
总结如下
审核编辑黄昊宇
-
传感器
+关注
关注
2554文章
51566浏览量
757687 -
激光雷达
+关注
关注
969文章
4046浏览量
190661 -
LIDAR
+关注
关注
10文章
328浏览量
29667
发布评论请先 登录
相关推荐
京瓷发布全球首款“摄像头-激光雷达”融合传感器
科普:一文了解固态和半固态激光雷达
激光雷达与其他传感器的比较
LIDAR激光雷达逆向建模能用到revit当中吗
lidar激光雷达扫描仪有什么用
lidar传感器和ryyb哪个好
Hokuyo Automatic发布新款3D激光雷达(LiDAR)传感器YLM-10LX
AEye发布4Sight™ Flex下一代激光雷达传感器系列的首款产品Apollo
Phlux推出一种新型传感器以进军汽车激光雷达(LiDAR)市场
华为详细解读激光雷达
车载激光雷达到底安不安全?


SolidVue为激光雷达传感器设计SoC,可评估周围物体的形状和距离
现代汽车和起亚汽车宣布开发片上激光雷达传感器





 工商网监
工商网监
评论