 电流检测放大器,80V共模电压双向
电流检测放大器,80V共模电压双向
介绍
每个脉宽调制控制器配置基本的控制元件,以便当连接到功率转换器的反馈信号时,有足够的回路增益和带宽可用来根据线路和负载的变化调节电压设定点。这些控制元件包括误差放大器、脉宽调制器、斜坡、电源开关的电压参考、时钟、锁和驱动器,可能集成也可能不集成在控制器内。这些元件的布置将电压模式或电流模式控制器与V2设备区分开来。
将转换器的反馈信号与电压参考进行比较,并在电压放大器的输出处产生误差信号。这个误差信号被馈送到一个PWM的一个输入端,另一个输入端是由一个内部时钟产生的固定振幅的电压斜坡。内部时钟设置锁存器,以启动一个驱动周期。图1显示了一个基本的电压模式控制器。
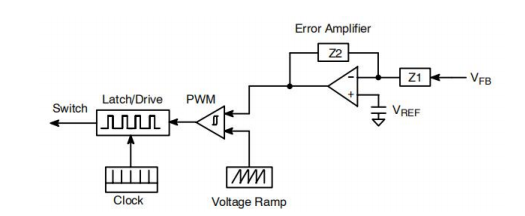
图1。V模式控制
当错误信号与斜坡相交时,PWM将重置闩锁并且电源开关被关闭。输出电压的微小变化,对应于输入线或输出负载的变化,会导致相对于斜坡的误差电压的变化。这反过来又导致调制器的占空比D改变,以调节输出电压。图2突出显示了当前模式控制器的元素。
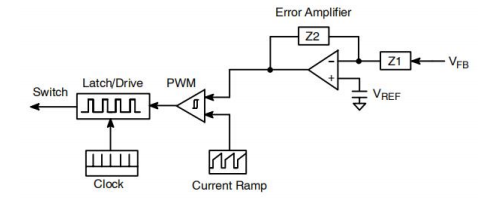
图2. 模式控制
在该控制实现中,误差信号再次由将反馈信号与其输入处的参考电压进行比较的电压放大器产生误差信号。如在电压模式控制中一样,该信号被馈送到PWM的一个输入端。然而,在电流模式控制中,第二个输入不是来自一个固定的斜坡,而是来自在电源开关中流动的电流。当电流斜坡的峰值时与错误信号相交时,电源开关循环被终止。因此,当外部电压回路检测到变化时,内环中的编程电流被上调或下调,以纠正偏差。图3说明了一个V2控制器的基本架构。
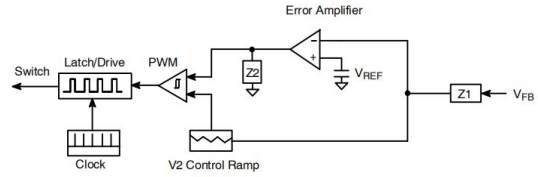
图3。V2控制
在这里,反馈信号与参考电压进行比较,以产生输入给PWM的一个输入的误差信号。然而,在V2中,PWM的第二输入是来自转换器输出的反馈信号。该反馈信号提供直流信息和交流信息(斜坡),以便转换器调节其设定点。内部时钟在每个开关周期中启动一个驱动脉冲。当反馈信号与错误信号相交时,开关周期被终止。
作为PWM的输入,误差信号和控制斜坡,都来自于转换器的输出电压,控制架构被称为V2。这有点
具有误导性,因为控制斜坡通常是由转换器中存在的当前信息生成的。控制体系结构也同样可以做到这一点支持电压模式控制。提出了一种利用电压前馈技术的应用。
最后,与在V2中是否采用了电流或电压模式控制技术无关,在图1、图2和图3中讨论的控制元件的排列之间有一个重要的区别需要注意。在V2中,高频信息的处理没有误差放大器。由于误差放大器不是高频路径的一部分,因此可以根据误差放大器的增益和相位特性对变换器的闭环增益和瞬态性能进行优化。当负载转换器的点必须支持基于微处理器的应用程序的100A/微秒的瞬态负载要求时,这一点就变得很重要了。
V2部署在半导体的集成电路组合中的许多控制器中,每个控制器都针对一个特定的应用程序。为了说明这种方法可能实现的高水平集成,下面更详细的讨参考了CS5141x降压调节器,如图4所示。
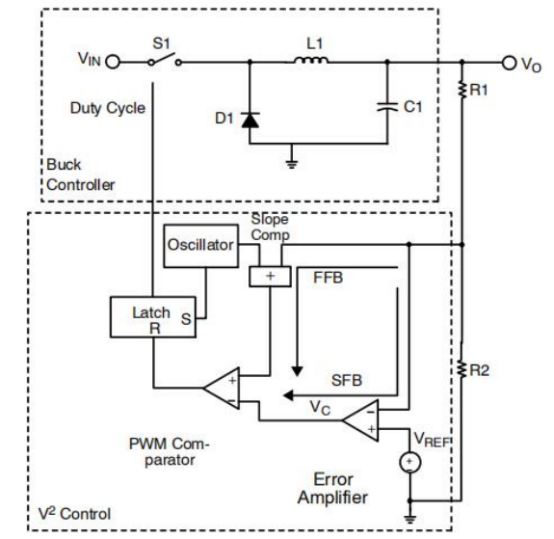
图4。巴克转换器与V2控制
来自降压转换器的反馈信号在被路由到PWM比较器的输入端之前以两种方式中的一种进行处理。快速反馈路径(FFB)在将反馈信号传递到PWM的一个输入端之前,将坡度补偿添加到反馈信号中。对慢反馈路径(SFB)进行比较对直流参考的原始反馈信号。在误差放大器VC的输出处产生的误差信号在被路由到PWM的第二输入端之前,被一个低频极点滤波。
当振荡器设置输出锁存器时,每个开关循环都被启动(S1开启)。
当FFB信号(交流加输出直流)超过SFB(错误直流)时,每个开关周期终止(S1关闭),并且输出锁存器被重置。在负载瞬态的情况下,FFB信号相对于滤波后的SFB信号变化得更快,导致占空比调制发生。从转换器中获取的实际示波器波形,显示开关节点vswit,错误信号vc反馈信号垂直走纸格式缓冲器(仅限交流组件)如图5所示。
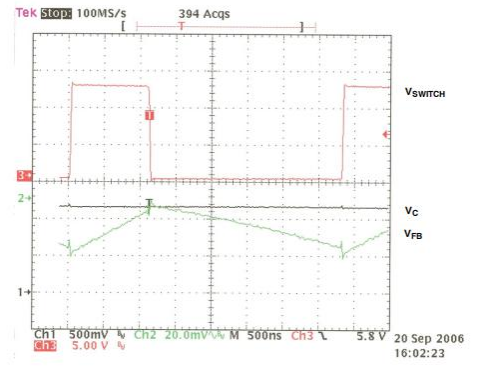
图5。
转换器回路增益
与任何PWM开关控制器一样,在V2控制器中存在3个增益块。(图6)第一个方块包括功率电路和PWM调制器,第二,输出滤波器和第三,通过补偿误差放大器提供负反馈的增益块。
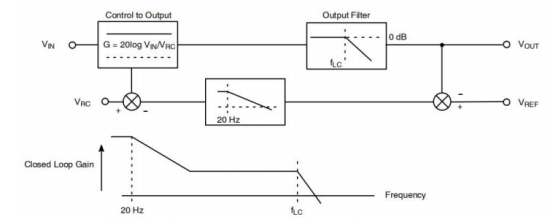
图6。闭环增益
功率电路和调制器的增益,也称为输出控制,由输入电压的比值定义文到控制斜坡的振幅静脉肾素浓度.下一个块是无源输出滤波器级,一旦滤波器的交叉频率f,它在斜率−2(40db/十年)处衰减液晶显示器(超过了1/2几√LC)。
误差放大器反馈块周围的补偿如下。误差放大器的输出阻抗很高(7 MQ)。因此,一个100 nF的小输出电容器将产生一个低频极,在这种情况下是在20 Hz。
整体的闭环增益可以通过叠加(以dB的总和)来找到,如图6所示。为了提供一个无条件稳定的环路和行为良好的瞬态响应,在环路的统一增益交叉时,环路周围的相移需要超过45度。由于误差放大器具有固定的增益,其补偿由单个低频极设置,这是通过调整控制斜坡信号的振幅值和相位来实现的。
控制坡道的产生
在最初的V2设计中,控制斜坡VCR是由转换器的输出纹波产生的。使用电流导出的斜坡提供了与电流模式相同的好处,即输入前馈、单极输出滤波器补偿和输出负载瞬态后的快速反馈。通常,选择的钽或有机聚合物电容器具有足够大的esr组件,相对于其电容性和esl纹波贡献,以确保控制斜坡是感应电感电流,其振幅足以保持环路的稳定性。该技术如图7所示。这是一种非常简单的技术,但与开关调节器的基本要求具有低输出纹波相反。还必须考虑组件随时间和温度变化的变化公差。
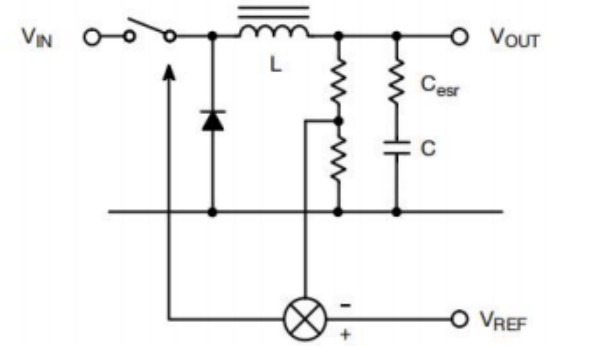
图7。从输出中生成的控制斜坡
电容器利用这种技术,由于寄生的esr和esl纹波贡献为零,因此可以很容易地获得低于10 mV的输出开关纹波。在这种情况下,控制斜坡会在电路的其他地方生成。
在V2中使用的控制斜坡可以通过许多仅受设计师个人创造力限制的方式得到。例如,一种方法是使用电感DCR感应技术,在输出电感上添加一个RC集成网络,并将“电感感应电流”斜坡耦合到反馈路径中。
另一种方法是从输入开关节点产生一个电压斜坡,以添加到直流反馈信号中。通过这种方式,创建了一个具有固有前馈的电压模式控制器。
使用DCR传感器的斜坡萌发
该技术被描述为参考了一个12 V到3.3 V的降压转换器的设计,使用MLCC电容器作为输出滤波器。转换器
的电路如图8所示。这里的重点是控制电路,而不是功率开关、自由轮二极管或电感器中定义转换器效率的损耗项。
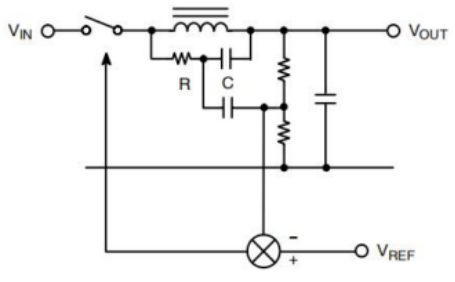
图8。由DCR感应器传感器产生的控制坡道
使用电压前馈方式产生斜坡
图9说明了该技术。电阻Rf和电容器Cf从交换节点到地形成一个滤波器网络。假设这个RfCf时间常数与3.86山S的开关周期相比较大,该网络以与LC输出滤波器相同的方式集成开关节点电压。因此,Cf上出现的直流电压为3v,Cf上的电压斜坡由下式给出。.3Vc = {(Vin/Rf) x DTs} / Cf = {DTs/CfRf} x Vin这个电压斜坡被耦合到转换器的反馈信号中,以提供电压模式控制。
值得注意的是,他的循环本身并不足以提供一个稳定的循环。有必要以零的形式增加额外的补偿,以补偿来自LC输出阶段的−2斜率。这是通过添加图9中的电容器Cz来实现的。控制斜坡和120 mV瞬态响应如图13和图14所示。这里需要注意的是,虽然回路是稳定的,但瞬态波形略微超过其设定点,这表明增益和相位裕度可以提高。
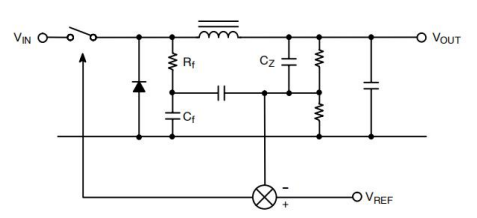
图9。从前馈电压开始的控制坡道
结论
本文讨论了电压模式、电流模式和V2、PWM控制器的基本条件。在V2中,控制斜坡可以从转换器内可用的电流或电压信息中创建。在降压转换器的情况下,采用MLCC的输出,给出了每种控制技术的一个例子。分析并提供了实验数据。瞬态数据证实,使用V2控制技术可以很容易地实现超过10 kHz的环路增益。其他的设计信息,包括Bode图,可以通过参考与每个V2产品相关联的演示板来获得。
审核编辑:汤梓红
-
放大器
+关注
关注
143文章
13609浏览量
213639 -
控制器
+关注
关注
112文章
16385浏览量
178377 -
电流检测放大器
+关注
关注
2文章
84浏览量
17736
发布评论请先 登录
相关推荐
电流检测放大器如何替代高共模仪表放大器
双向电流检测放大器工作在 -5V 至 80V,并且在 100kHz 时具 80dB CMRR

基于MAX4992 0-70V电流检测放大器解决方案设计
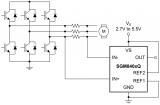
圣邦微电子推出车规级 -4V 至 80V、高 PWM 抑制的双向超精密电流放大器 SGM840xQ





 工商网监
工商网监
评论