 如何打造优质的自动驾驶ISP
如何打造优质的自动驾驶ISP
在让汽车洞察秋豪——秒懂自动驾驶ISP(一)中,我们了解了什么是ISP、自动驾驶ISP的特殊性以及黑芝麻智能NeuralIQ ISP优势,本期我们将深入理解打造优质的自动驾驶ISP,需要经过怎样的图像质量调试和其背后的技术原理。
ISP 图像质量调试
ISP图像质量取決于算法设计和效果调试两个方面。算法设计负责提供优良“基因”的图像处理算法功能,通过调试灵活的适配不同特性的摄像头 (各类镜头、CFA、HDR策略),输出满足用户需求的图像质量效果。
典型的ISP调试流程如下图所示:

图1 ISP调试流程
需求确认:确认调试摄像头的分辨率、帧率、工作模式、应用方向;
模组检查:摄像头硬件品质检查(模组、sensor、镜头);
参数标定:不同sensor特性差异补偿;
客观调试:通过图像质量客观指标的把控保证ISP 基础调优效果;
主观调试:针对特定应用方向和客户需求迭代细调;
自动驾驶ISP调试
近年来,越来越多的摄像头应用于汽车系统,已经成为现代汽车中不可或缺的一部分。对于自动驾驶的安全性而言,摄像头输出的图像质量至关重要。车载摄像头以感光成像为理论基础,实际使用中面临着复杂使用环境的诸多挑战:
夏日晴天极亮到夜晚无灯极暗的大尺度场景照明亮度变化范围;
同一场景下,超过120db 的高动态范围(HDR);
各种极端天气:雨、雾、雪、沙尘;
复杂的光源环境与颜色还原,LED Flicker;
大景深范围与探测距离;
低速/高速运动场景;
面对如此多的挑战,结合不同的自动驾驶应用,给车载摄像头ISP 的调试提出了不同的需求。举例来说:
高级驾驶辅助系统ADAS:AEC/AWB响应时间、HDR还原、低光信噪比、颜色准确性、运动模糊、高分辨率sensor适配性;
360°全景环视系统SVS:鱼眼镜头暗角补偿、多摄像头调试效果一致性;
驾驶员监控系统DMS:感光灵敏度与信噪比、图像清晰度;
电子后视镜CMS:HDR恢复、监视器显示图像质量;
黑芝麻智能图像质量调试案例
运动模糊 vs 噪声水平
对于自动驾驶常见的夜晚低光场景,ISP 输出图像为了获取合适的图像亮度,往往需要将曝光时间增长到最大值,并且提高增益的补偿。
运动场景曝光时间的增加会带来运动模糊问题,增益的设置则会影响到图像整体的噪声水平。尤其是大FOV镜头成像的边角区域,一方面边角透视失真导致运动模糊更加严重,另一方面由于镜头阴影亮度补偿噪声水平也会更高。如何平衡曝光时间和增益的分配,并调试合适的去噪参数,是处理这类问题的核心考量。
当曝光时间从28ms 变化到20ms时,运动模糊可以得到改善。但是为了保持图像亮度一致,左图需要用到更高的sensor 增益,从而导致了更高的噪声水平。
对于自动驾驶ISP调试而言,需要优先考虑感知算法能容忍的运动模糊像素个数上限。然后依照特定应用的车辆速度、场景距离、焦距、像素尺寸,反推出对应的最大曝光时间;再依照该最大曝光时间的AEC设置,调试不同场景的去噪参数。
左侧结果图通过运用多帧3D去噪,可以进一步的缩短曝光时间,显著改善运动模糊的同时,尽管单帧图像的增益高达9倍(为了保持图像亮度一致),处理结果的SNR也与右侧3倍低增益图像类似,噪声得到了很好的抑制。
亮度 vs 对比度 vs噪声水平 vs 图像细节
低光照或不均匀光源的环境, 对图像的噪声/亮度/对比度/细节带来了极大的挑战。
图像对比度作为一种图像内容增强方法,原理上也会增强图像噪声内容。
在ISP调试中,亮度vs对比度 vs 噪声水平vs图像细节是一个多模块耦合调试的典型例子。实际中,需要根据应用需求,通过多场景调试,平衡各样例最优效果。
黑芝麻智能 NerualIQ ISP 对于图像亮度vs对比度 vs 噪声水平vs细节耦合调试的一个示例。场景为路灯光晕影响下, 暗处的表现。左侧的结果,图像亮度太暗,导致无法分辨细节。中间的结果,通过提升图像亮度,图像整体轮廓辨别度提升,但是因为对比度不够,细节内容仍较难分辨,亮度的提升也一定程度带来了噪声水平的提升。右侧的结果,通过平衡亮度和对比度,然后结合适当的去噪参数调整,图像整体轮廓和局部细节(穿反光衣服的行人)都得到了较好的图像质量恢复。
交通灯颜色还原 vs 整体颜色还原
白平衡是ISP调试颜色还原时需要面对的一个经典问题。白平衡问题有两个起源,一是黑体辐射,二是人眼颜色恒常性。
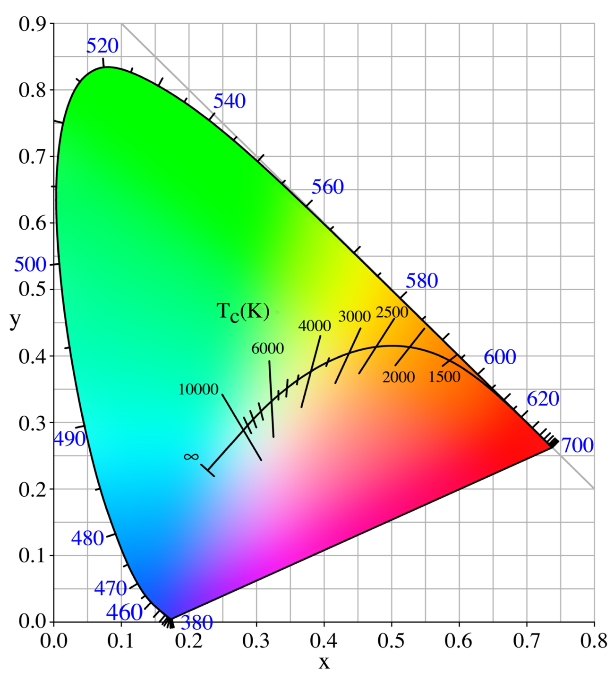
图 7 色度图标注黑体辐射普朗克轨迹
(图像来源:https://en.wikipedia.org/wiki/Black-body_radiation)
在任何条件下,对任何波长的外来辐射完全吸收而无任何反射的物体定义为黑体。黑体辐射的电磁波的光谱特性只和黑体的温度有关。如图7所示,随着温度升高,黑体辐射的颜色呈现由红—橙红—黄—黄白—白—蓝白的渐变过程,黑体的这个温度称为该光源的色温。
常见光源的色温和光谱曲线如下图:
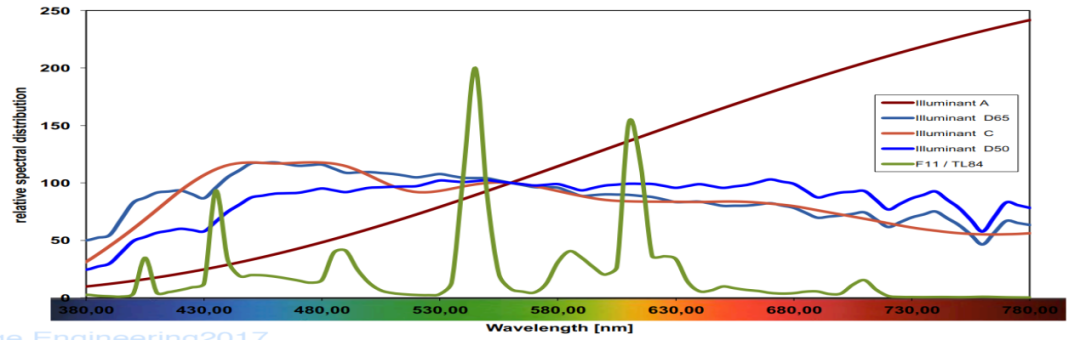
图 8 不同光源光谱曲线
(图像来源:https://www.image-engineering.de)
例如,白炽灯的光色是暖白色(图8的A光),其色温为2700K,而日光色荧光灯的色温则是5000K左右(图8的D50光)。
人眼颜色恒常性是指,当照射物体表面的颜色光发生变化时,人们对该物体表面颜色的知觉仍然保持不变的知觉特性。很好的例子是当我们进入一个白炽灯照亮的房间一会儿以后,就不会有光线昏黄的感觉了。
对于以CMOS、CCD 为代表的图像sensor而言,在不同色温和光谱的光源照射下,Bayer RGB 三通道的响应比例是不同的。这必然导致如果不经过处理,图像的颜色响应会出现显著的不一致,提升了后续感知算法处理的困难。
ISP 中的自动白平衡(AWB)功能即专门针对这个问题设计。一个优良的AWB算法+调试结果,能比较准确的判断出成像场景的色温范围,并根据已经标定好的sensor 光谱特性,转化为该场景下B和R通道的补偿增益值,实现“白色做白”。
以上是理想的情况。对于自动驾驶而言,特别是夜晚场景,通常会包含不止一个光源。如果这些光源的色温不一致,就会产生典型的混合光场景问题。
如果需要将整体颜色还原为白色,需要加较多的B通道增益,导致绿灯效果偏青,即左图效果。右图通过限制B通道增益,绿灯颜色还原效果较好,但整体效果偏暖。
该场景也是一个混合光源场景,隧道内照明灯色温偏低,颜色偏暖,隧道外阳光直射色温偏高,颜色偏冷。除此以外,该图像sensor使用了大小像素LPD-SPD技术,针对HDR场景,长曝光使用大像素采集用于合成暗区(隧道内),短曝光使用小像素采集用于合成高光区(隧道外)。由于大小像素光谱响应不同,进一步加重了隧道内外颜色差异(左图结果)。针对这个问题,黑芝麻智能 NerualIQ ISP 专门设计了针对大小像素颜色差异补偿的处理算法和调试策略,依照预先标定的大小像素感光差异,动态调整小像素的AWB和CCM,使之处理输出颜色尽量接近大像素。调试结果如右图所示,通过调试,隧道外异常偏蓝色问题得到了较好的改善。
结语
所谓“大厨做菜,众口难调”。通过以上几个实际的调试例子,我们可以认识到,从原理来说,ISP调试的一般目的,不应当设定为解决所有的图像质量问题。而是应该根据不同模组、不同应用、不同客户的差异化需求,通过差异化参数调整,最大化ISP算法设计的潜能,使输出图像质量定制化满足特定需求。
审核编辑:郭婷
-
摄像头
+关注
关注
60文章
4845浏览量
95784 -
自动驾驶
+关注
关注
784文章
13835浏览量
166519
原文标题:让汽车洞察秋毫——秒懂自动驾驶ISP(二)
文章出处:【微信号:BlackSesameTech,微信公众号:黑芝麻智能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一文聊聊自动驾驶测试技术的挑战与创新

自动驾驶汽车安全吗?


自动驾驶技术的典型应用 自动驾驶技术涉及到哪些技术








 工商网监
工商网监
评论