 浅析基于Fluent的二自由度圆柱涡激振动数值模拟与应用
浅析基于Fluent的二自由度圆柱涡激振动数值模拟与应用
一、案例描述
本案例源自美国康奈尔大学经典圆柱水槽试验,在实际的工程应用中,管柱被认为是一个有弹性支撑的刚性结构,结合切片理论可将计算模型简化至二维,可以看作是一个质量弹簧阻尼系统,如图中所示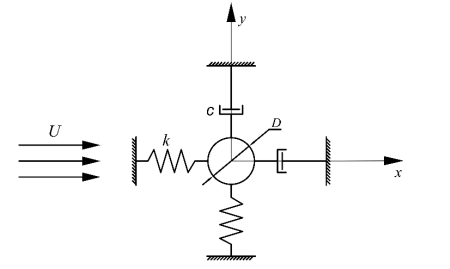
圆柱涡激振动示意图
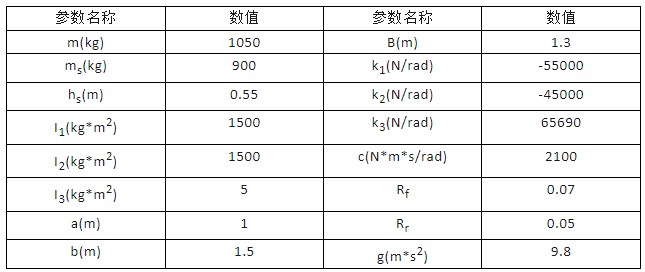
计算参数如下表所示
二、采用Designmodeler进行几何模型建立
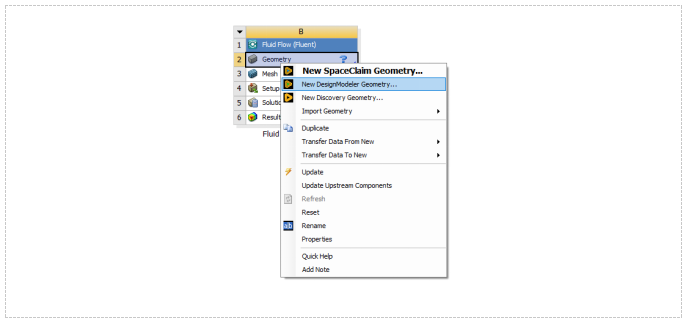
Workbench中导入Fluid Flow
右击Geometry,选择designmodeler
详细几何建模过程不进行描述
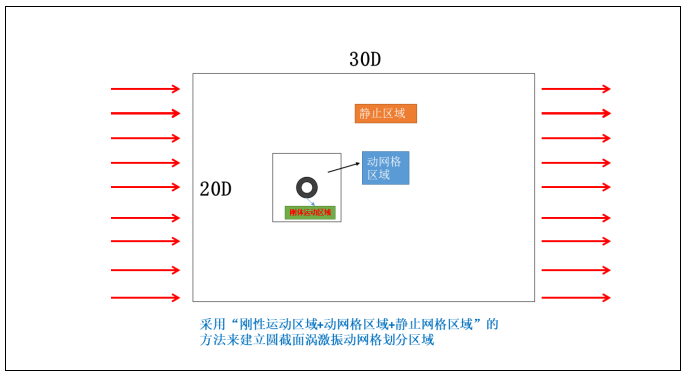
流体计算域模型如图所示,模型使用的计算域为30D×20D矩形区域。入口边界距离圆柱中心10D处,出口边界距离圆柱中心20D处,上部边界和下部位于距圆柱体中心10D处,并被定义为对称边界。
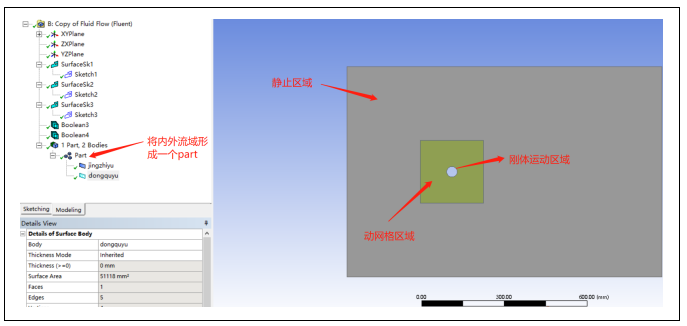
其中圆柱位于入口下游10D处,位于横流方向的中心线(y=0)。阻塞率为圆柱直径与流场域宽度的比值,本文阻塞率为0.05,不超过0.05,故满足要求。采用“刚性运动区域+动网格区域+静止网格区域”多区域划分的方法来建立圆截面涡激振动流场区域,整体流场分为外流域部分和内流域部分。
注:为保证流场在内外流域交界地方一致性,选中内外流域,鼠标右击from a part,可保证后续画网格时具有网格一致性。
三、采用Meshing进行网格划分
Workbench中导入Fluid Flow
双击Meshing,详细网格划分步骤在这里不介绍了
整体流场在进行网格划分时,采用“刚性运动区域+动网格区域+静止网格区域”的 方法来建立圆截面涡激振动网格划分区域,如图中所示,具体划分区域如下: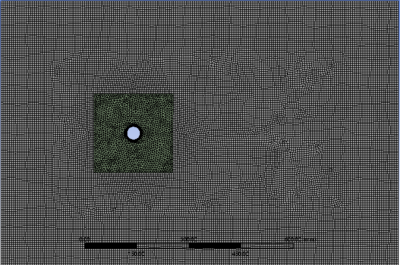
(1) 动网格区域采用非结构化三角形网格进行网格划分,Fluent动态网格模型算法采用Smoothing+Remeshing的方式更新动网格,此区域为变形区,为圆柱的振动提供了一个运动的空间,其网格会因圆柱的运动而进行重新划分,因此网格的初始质量好但随着重新划分可能有所下降,但可通过参数设置使重新划分后的网格质量尽可能好。
此区域的大小由圆柱的振幅大小决定, 考虑到文献实验中的最大振幅为1.5D左右,因此动网格区域尺寸取为6D×6D,留有充足的空间允许圆柱进行大范围的的振动,能够很好地满足数值计算的需要(避免振幅超过容许空间从而挤压外边界形成负网格);
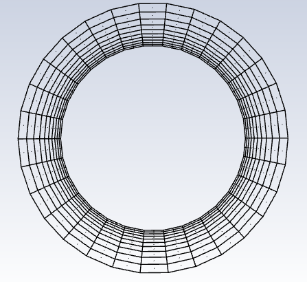
(2)刚性运动区域主要包括圆柱流固耦合边界与边界层区域,圆柱近壁面边界层网格采用膨胀层网格处理,使在主要流速下预估的Y+=1,边界层第一层高度可按经验公式计算,近壁面划分15层四边形结构化边界层网格,网格增加率设置为1.2,向外过渡至与动网格的交界处。
边界层区域网格尺寸较小、网格划分质量较好并具有与圆截面相同的运动速度,因此将随着圆截面的振动而振动,由此来保证圆截面附近的网格一直处于初始的高质量状态从而确保各时间步都具有足够的计算精度。
(3) 静止网格区域采用四边形结构化网格,整体网格尺寸网格尺寸保持不变,用以为模拟尾流中的涡街提供更好的计算精度。
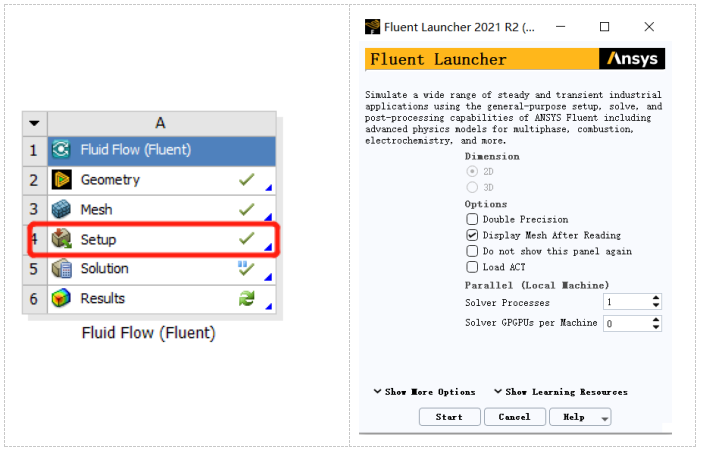
四、Fluent 基本设置
步骤一:启动fluent
Workbench中导入Fluid Flow
双击Setup,不考虑运行计算的话,默认即可
步骤二:General 设置
点击左侧模型树节点 General ,出现 General 面板,如图所示。
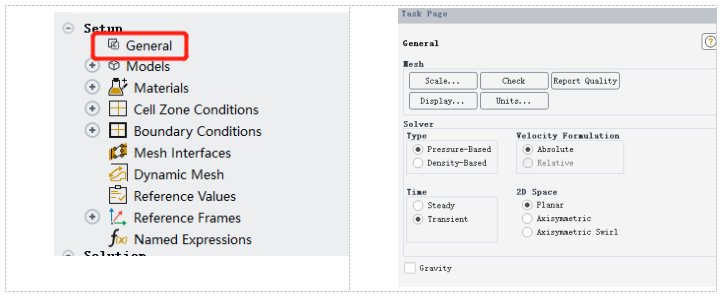
对面板进行参数设置 Scale…
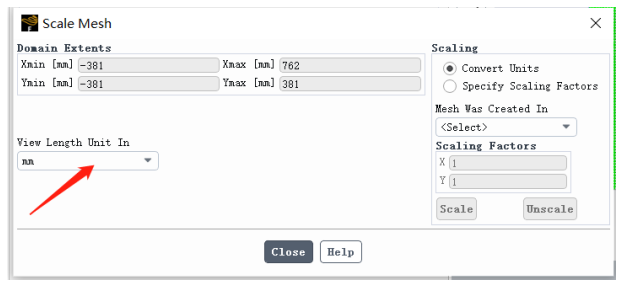
点击scale…
将单位修改为与几何建模时尺寸单位保持一致
点击close
Check
点击 Check 按钮,屏幕输出网格信息如图所示,确保网格最小体积为正值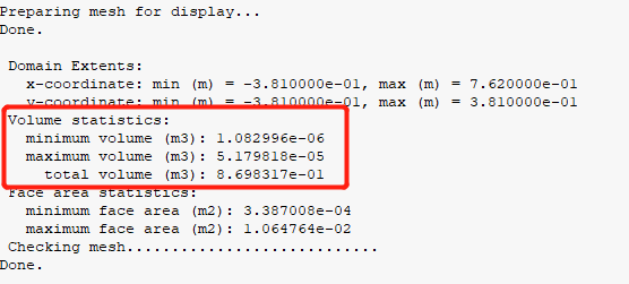
Time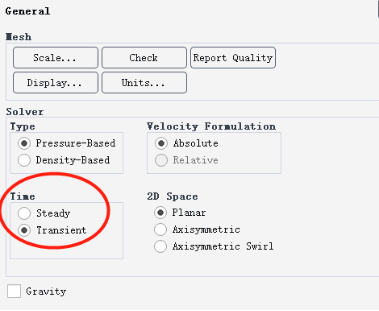
由于涡激振动属于周期性振动,Time选项设置为transient,进行瞬态研究 其余保持默认即可
步骤三 Models设置
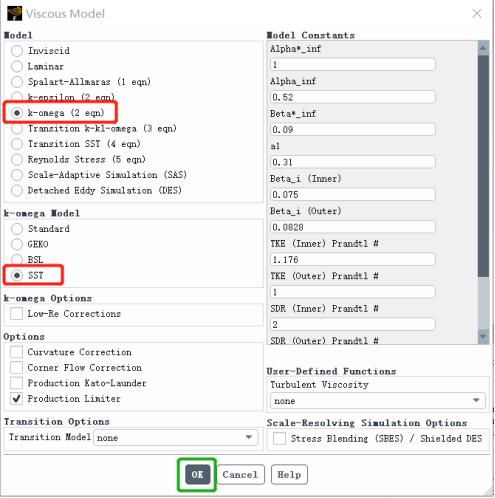
选择模型树节点 Models ,在右侧 Models 列表项中双击,弹出湍流模型设置对话框。设置参数:
选择 Model 为 k-omega ( 2 eqn )
选择k-omega Model 为 SST
选择OK按钮关闭对话框
其他保持默认即可
步骤四:Materials设置
选择模型树Materials,分为流体材料fluid和固体材料solid,双击材料空气air进行设置,弹出材料设置窗口
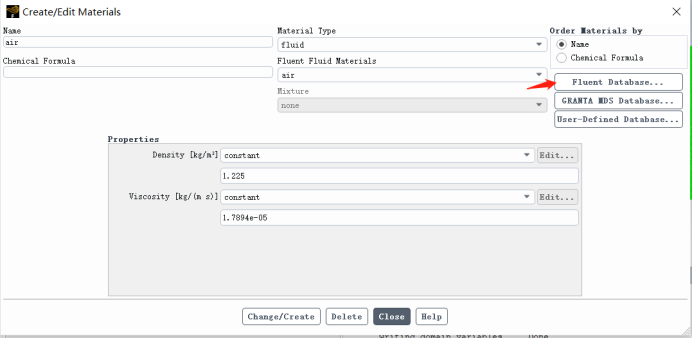
点击Fluent Datebase…
下拉菜单至最后,找到材料水(water)
点击Copy
其余选择默认,点击close关闭

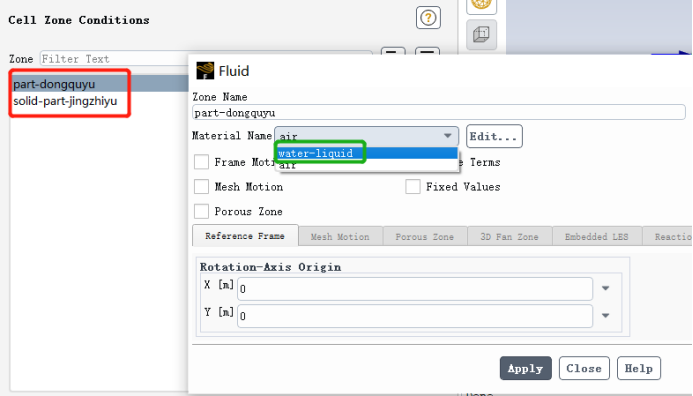
步骤五 Cell Zone Conditions
选择模型树Cell Zone Conditions,双击弹出区域设置窗口,如图所示
分别选择part-dongquyu和solid-part-jignzhiyu,将属性设置为流体
将material name 选择为 water-liquid
其余保持默认,点击close关闭
步骤六:Boundary Conditions
点击模型树节点 Boundary Conditions ,参数面板如图所示。
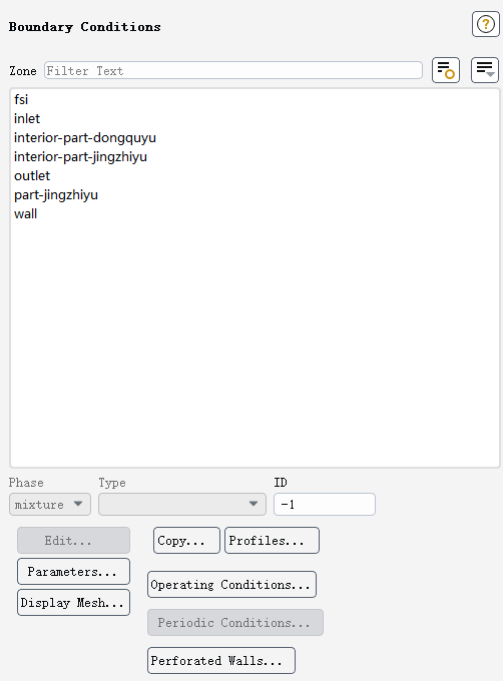
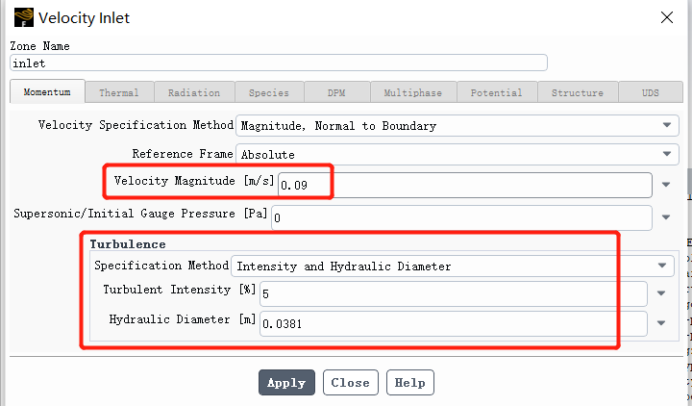
1、Inlet 边界设置
鼠标双击 inlet 列表项。设置参数:
设置 Velocity Magnitude 为 0.09m/s
设置 Specification Method 为 Intensity and Hydraulic Diameter
设置 Turbulent Intensity 为5%
设置Hydraulic Diameter 为 0.0381
选择OK按钮关闭对话框
2 、 Outlet 设置
鼠标选中 outlet 项,设置 Type 为 Pressure-outlet,Gauge pressure设置为0,其他参数保持默认。
步骤七 :Dynamic Mesh
点击模型树节点 Dynamic Mesh ,参数面板如图所示。
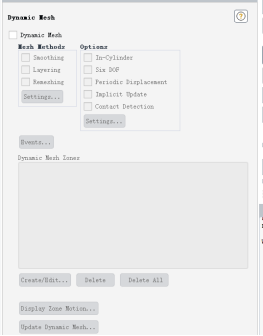
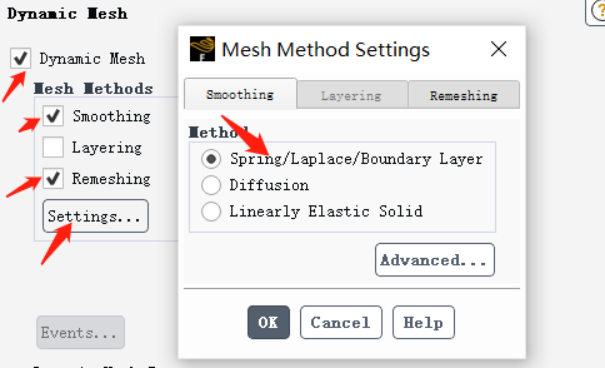
勾选Dynamic Mesh
勾选Smoothing和Remeshing
点击settings…,选择 spring
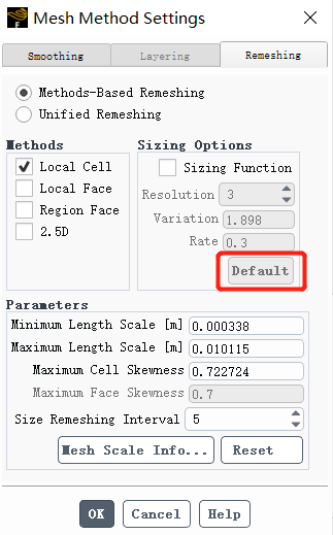
选择remeshing,点击default,点击ok
导入外部UDF文件
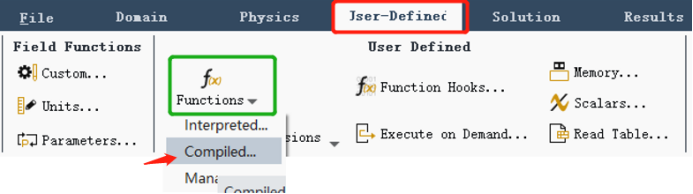
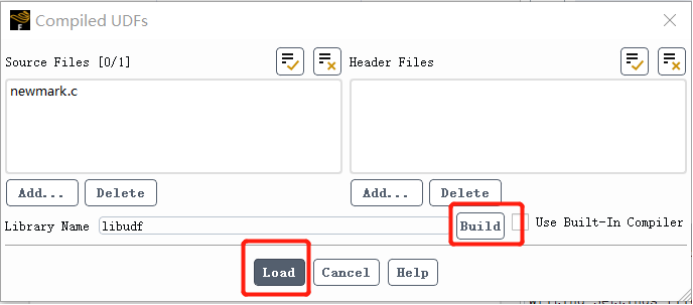
点击菜单栏User-Defined
选择需要的UDF文件
点击Build,点击加载Load
边界层网格分离
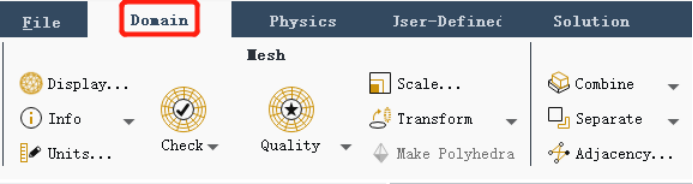
点击菜单栏Domain
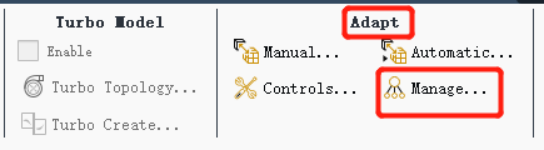
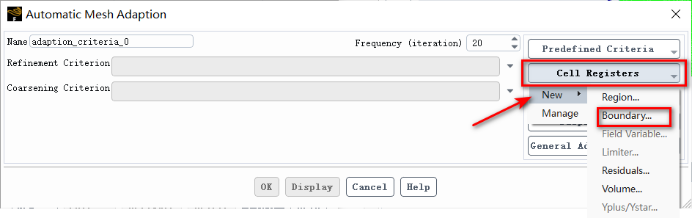
选择Adapt,点击Manage…
选择Cell Registers,点击New
点击boundary
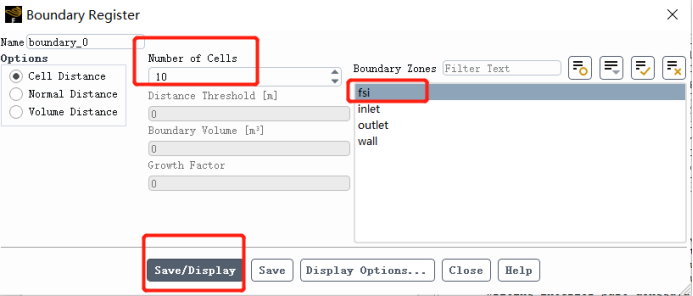
选择Boundary zone 中的fsi
设置number of cells 为相应边界层网格的层数
点击save/display
点击close关闭
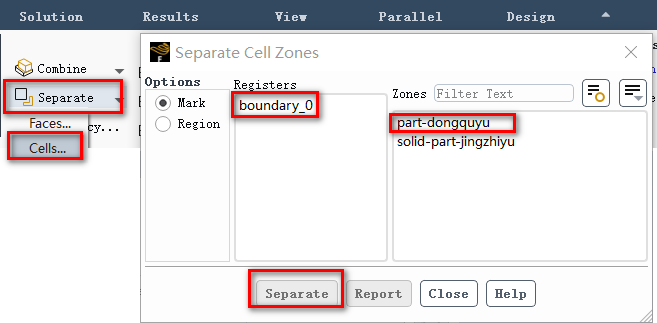
点击Domain 中的 separate,选择cell…
选择boundary_0和part-dongquyu
点击separate
点击close关闭
边界运动或变形的指定
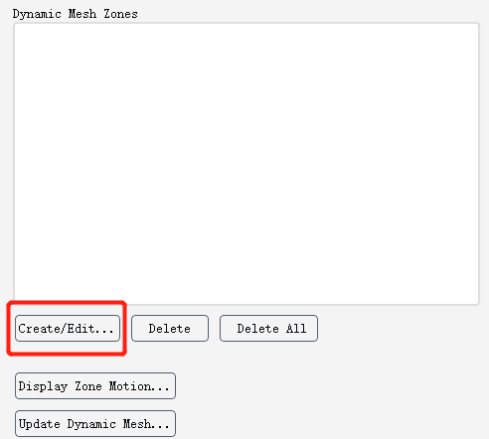
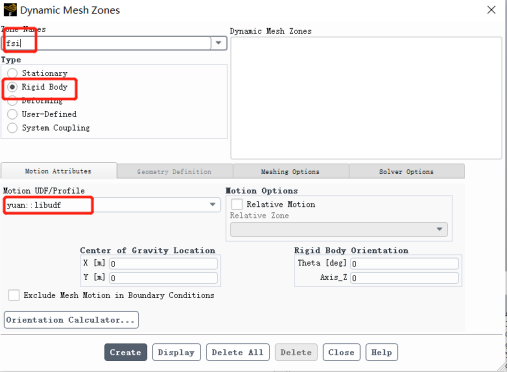

点击动网格部分的dynamic mesh zones的create
Zone name 选择为fsi
Type 选择为刚体运动 Rigid body
UDF选择导入的fluid::libudf
将分离出的边界层网格part-dongquyu:013进行相同的操作
其余默认,点击close关闭
步骤八 Reference Values
选择模型树节点 Reference Values,如图所示
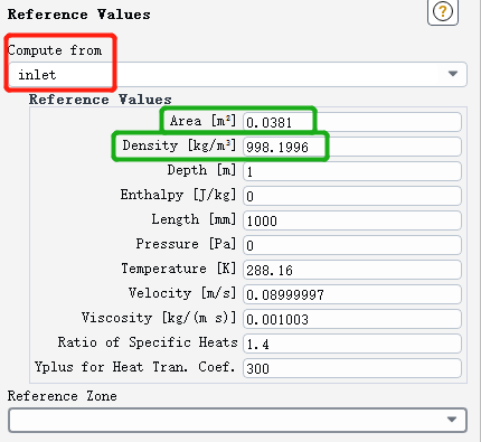
Compute from 选项选择为 inlet
Area 设置为0.0381
Density设置为998
其余保持默认
步骤九 Solution Methods
此模型保持默认参数
Step 11 :Solution Controls
保持默认参数
步骤十 Monitors
选择模型树节点 Monitors,如图所示,选择Report Files,鼠标右键,点击edit‘’
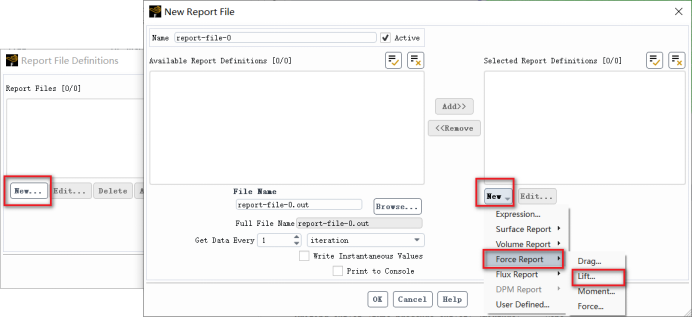
点击report files 中new…
点击new report file中的new,选择force report,点击lift…
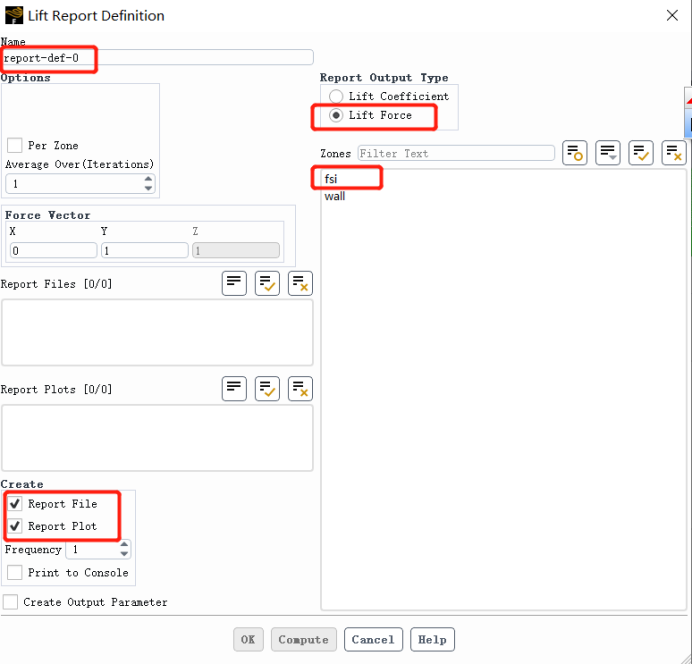
Name 可自己命名名字
点击lift force,选择fsi
勾选report file和report plot
点击OK,关闭窗口即可
步骤十一 Initialization
点击模型树中的 initialization,出现如图所示窗口
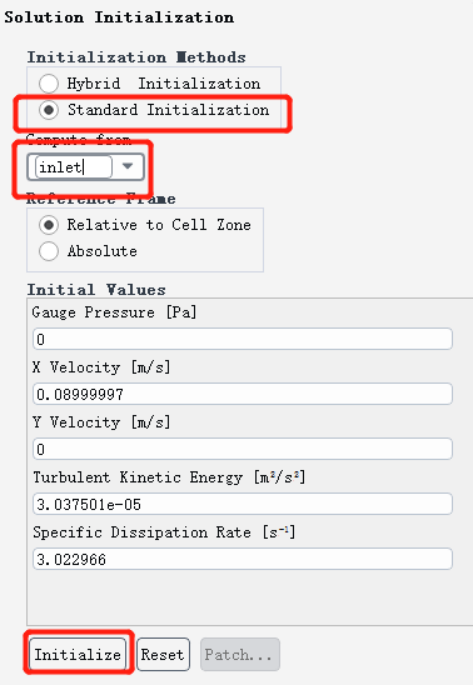
选择 Standard Initialization
Compute from 选择 inlet
点击 initialize
步骤十二 Calculation activities
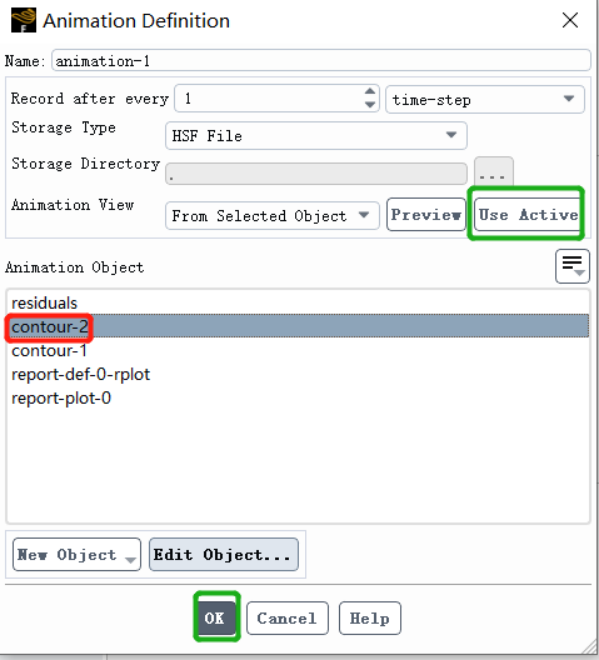
双击 solution animations,如图所示
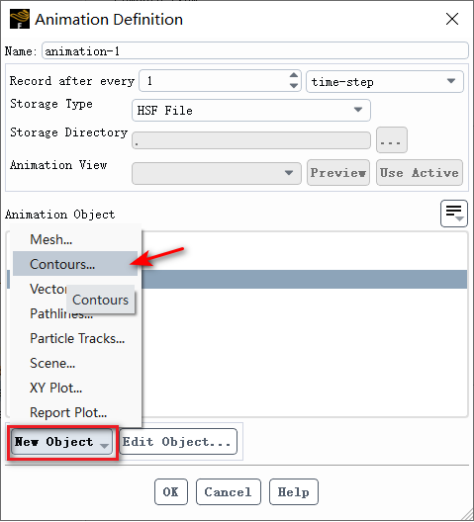
点击new object
选择contours…,如图所示
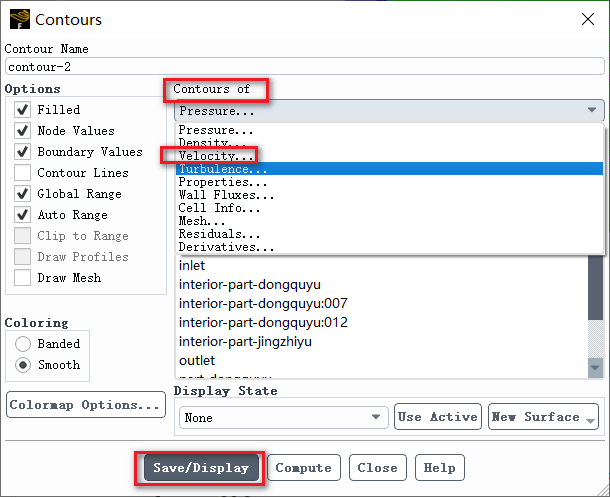
云图Contours of 选择 为velocity
点击save,出现初始速度云图
鼠标滚轮调整到合适窗口,选择contour2,点击use active
点击OK
步骤十三 Run calculation
点击左侧模型树节点Run calculation ,出现 Run calculation 面板,如图所示。

将number of time steps 设置为需要时间步数
每一个时间步时长 time step size设置为0.01
点击calculate,进行计算
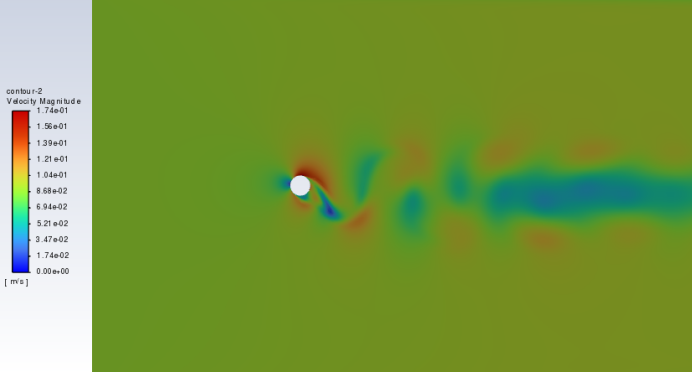
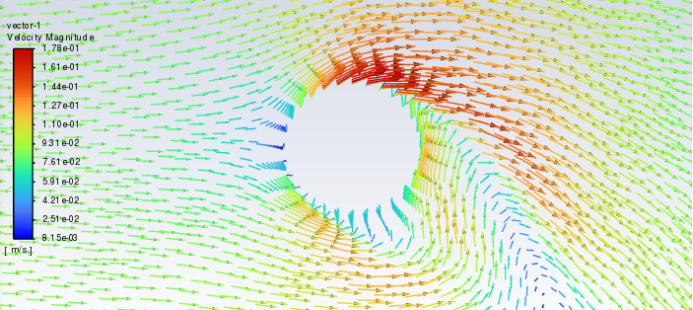
步骤十四 查看计算结果
点击模型树Results,可查看残差曲线、各种云图(速度、压力等),速度矢量图、动画等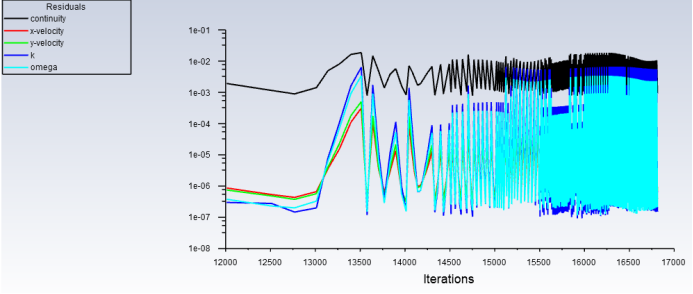
审核编辑:刘清
-
UDF
+关注
关注
0文章
4浏览量
6479 -
mesh模块
+关注
关注
1文章
5浏览量
1408
原文标题:基于Fluent二自由度圆柱涡激振动数值模拟与应用研究
文章出处:【微信号:sim_ol,微信公众号:模拟在线】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
DSP在六自由度电磁跟踪系统中的应用
二自由度两弹簧系统振动实验设计与分析
基于单亲遗传算法二自由度PID控制器设计
SIMTEC HEXADRIVE 6自由度运动模拟平台
二自由度内模控制方法

三自由度转台的设计与实现

二自由度汽车油气悬架系统模型
风电机组如何避免涡激振动
基于Simulink的汽车2自由度模型





 工商网监
工商网监
评论