 Windows实时运动控制软核(一):LOCAL高速接口测试之C#
Windows实时运动控制软核(一):LOCAL高速接口测试之C#
今天,正运动小助手给大家分享一下MotionRT7的安装和使用,以及使用C#操作上位机前需要做的一些准备工作。
01 MotionRT7简介
MotionRT7是深圳市正运动技术推出的跨平台运动控制实时内核,也是国内首家完全自主自研,自主可控的Windows运动控制实时软核。

1.MotionRT7具备以下特点:
(1)独立软件安装,适合各种Windows电脑;绿色免安装,快速体验;采用硬件绑定的运行许可证授权(未授权也可试用);可以方便的配置、启动、连接、模拟运行等。
(2)与MotionRT其它版本功能兼容,一次开发,可快速切换到嵌入式,Linux各种平台。
(3)统一函数库接口,快速的本地LOCAL接口,运动函数调用快至us级别,比普通PCI卡快数十倍。
(4)集成机器视觉,快速搭建各类运动控制+机器视觉的实时应用。
(5)强大多卡功能,最多240轴联动,支持跨卡联动,脉冲与总线联动,振镜与平台联动,轻松实现位置锁存/PSO等高级功能。
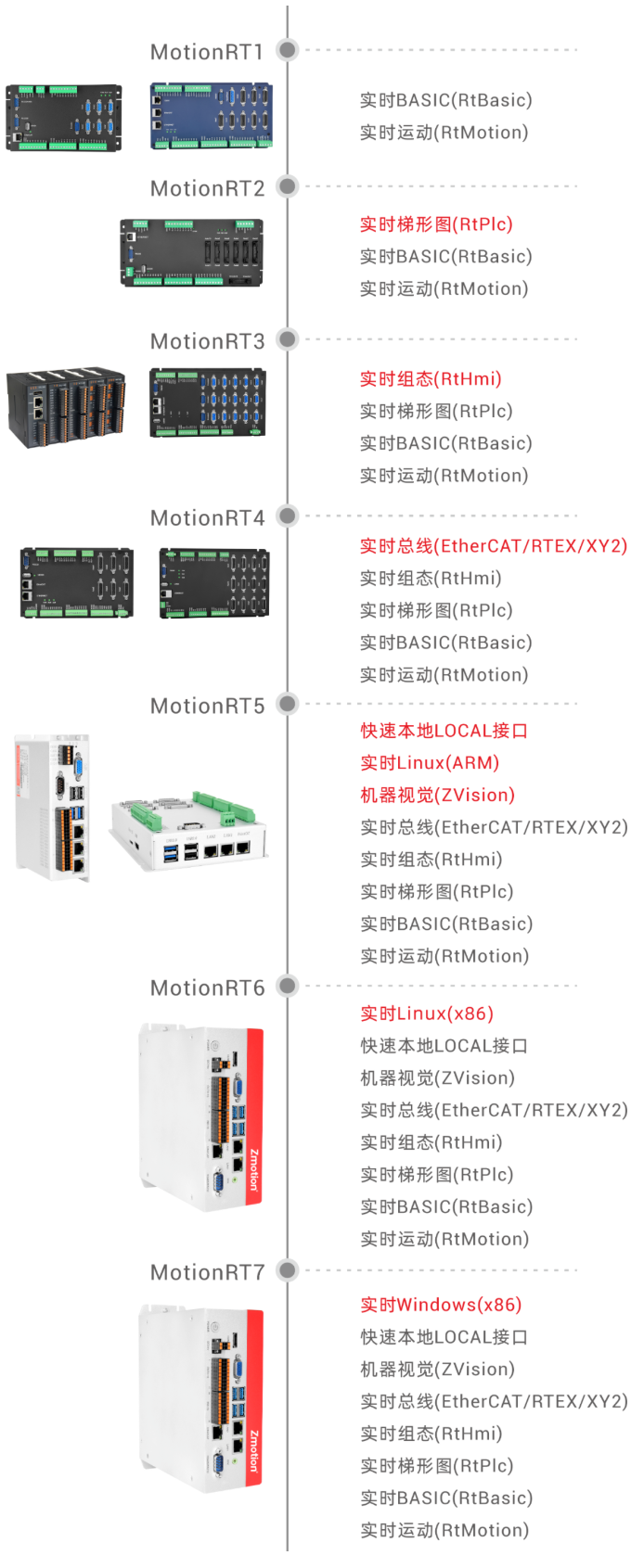
2.持续迭代的运动控制实时内核MotionRT
MotionRT是正运动技术持续建设与发展的运动控制实时内核,已不断迭代了7代,从MotionRT1到MotionRT7。
3.MotionRT7采用模块化软件架构
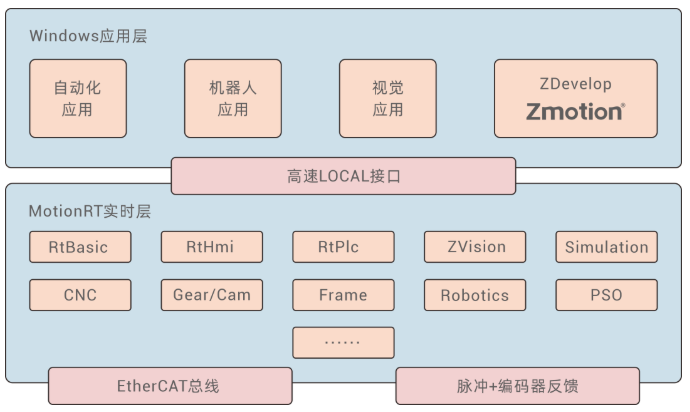
运动控制程序、视觉算法、MotionRT7运动控制引擎,通过高共享内存进行数据交互,大大提升运动控制与机器视觉的交互效率。用户自定义功能,融合Gmc、Gear/Cam、Frame、Robotics、CNC等算法,打造用户的专用控制系统。
4.统一开放的API函数
统一完善的SDK库,所有的第三方开发环境同一套API接口,跨平台的产品架构,提高效率,保持兼容性。

5.简单易用的运动控制功能
功能特性:
a.点位运动、直线插补、圆弧插补、螺旋插补、连续轨迹加工;
b.电子凸轮、电子齿轮、同步跟随、位置锁存、虚拟轴整加;
c.S曲线加减速,SS曲线加减速,轨迹运动更柔和;
d.1D/2D/3D高速位置同步输出PS0,充分满足视觉飞拍、高速点胶、激光加工;
e.客户可自定义运动控制算法或者机器人正反解算法;
f.方便与第三方视觉配合。
6.开放的EtherCAT与配置调试工具
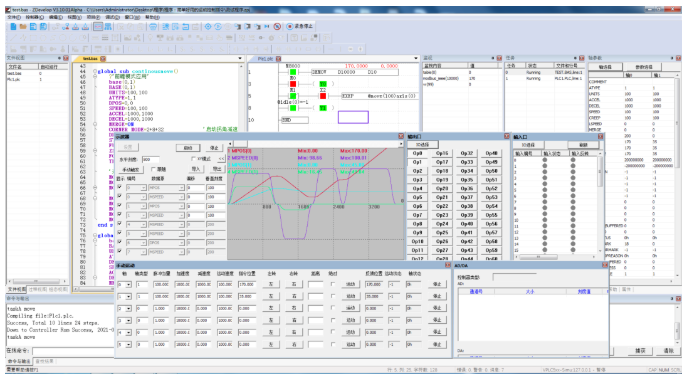
ZDevelop具备开放易用的配置,开发,调试,诊断等工具。而且ZDevelop是个绿色免费的软件,具备轴调试,轴状态,示波器等工具。
MotionRT7广泛支持EtherCAT总线,MotionRT7支持市面上广泛易用的EtherCAT伺服,EtherCAT步进,EtherCAT IO,EtherCAT阀岛,EtherCAT传感器。后续将持续完善EtherCAT的配置工具,持续努力做最好用的运动控制。
02 MotionRT7的安装和使用
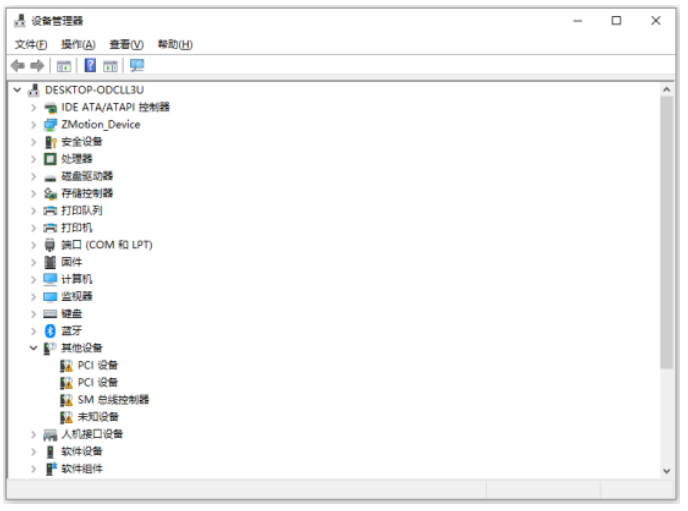
第一步:安装驱动程序
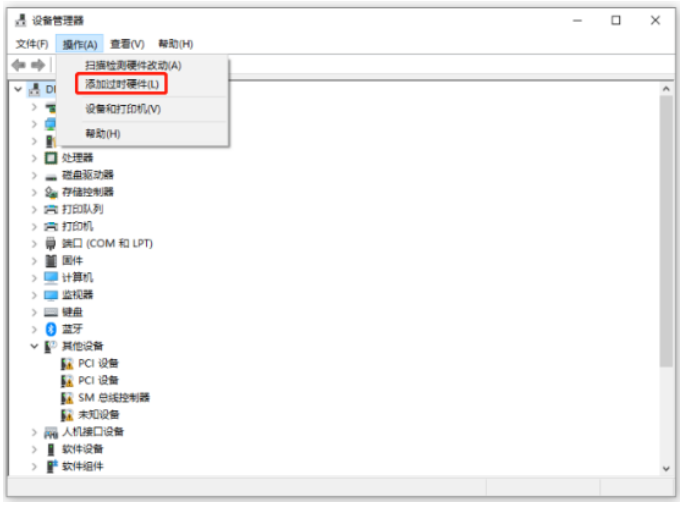
1.打开“设备管理器”,选择“操作”中的“添加过时硬件”,并且选择“手动选择”。
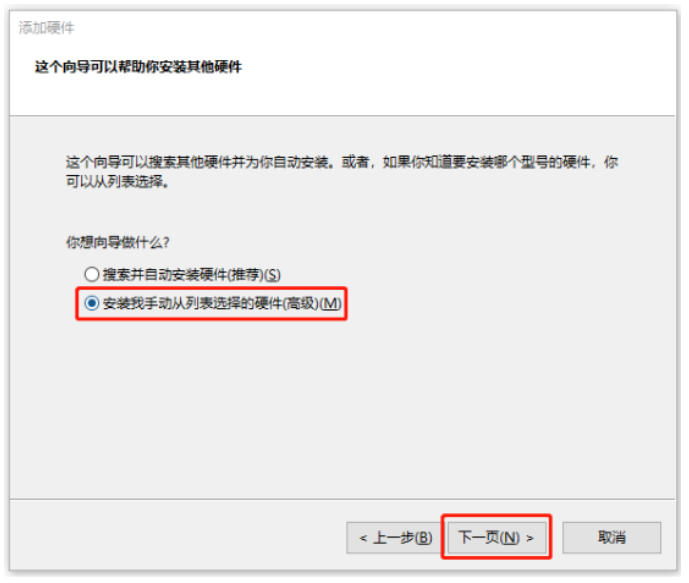
2.点击“下一页”。
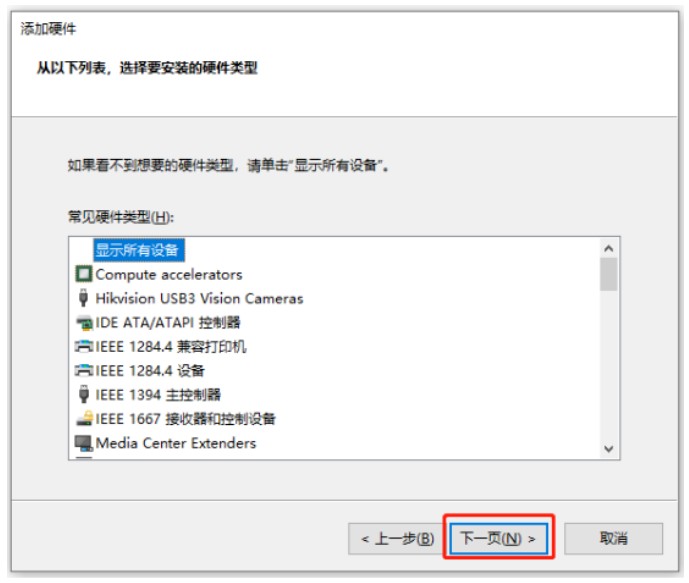
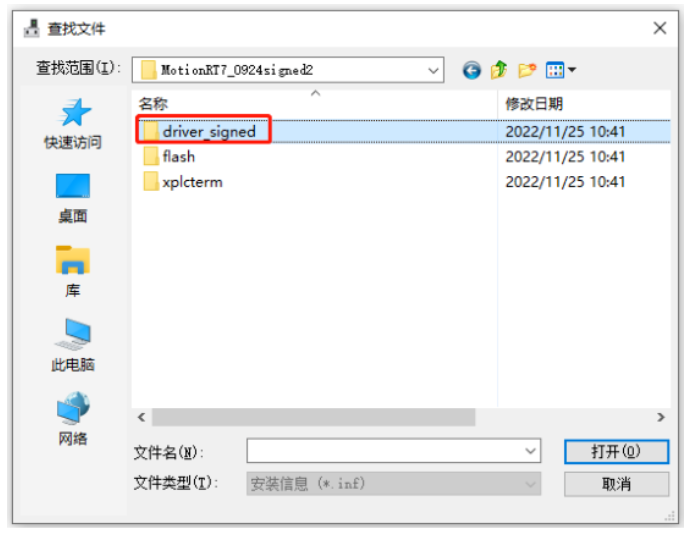
3.点击“从磁盘安装”。

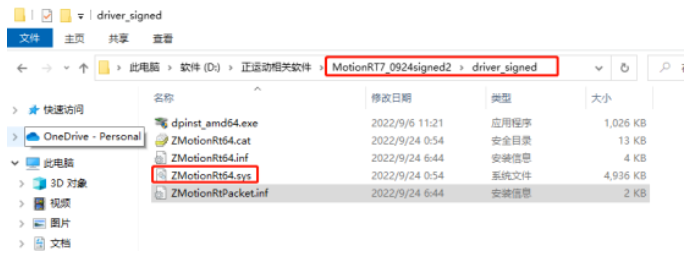
4.选择驱动器所在的路径,打开文件夹“driver_signed”,选择“MotionRt64.sys”。

5.然后一直点击下一步,直到安装完成。
注意:驱动更新时,要从设备管理器删除设备,一定要选择把驱动文件也删除。
第二步:运行控制台程序
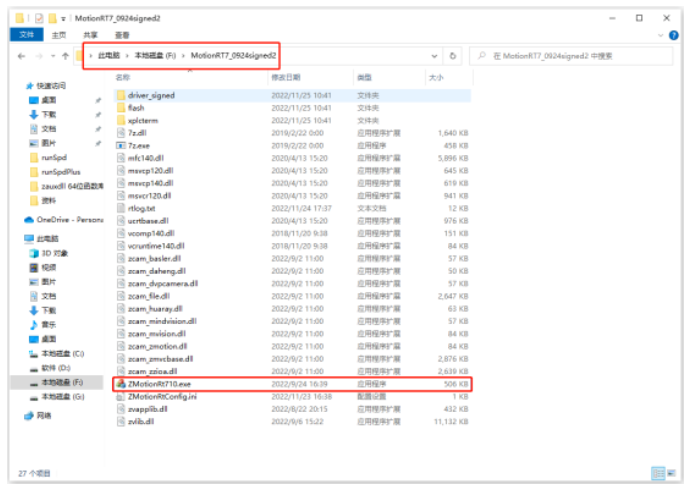
1.打开控制台程序所在位置,运行可执行文件“MotionRt710.exe”。
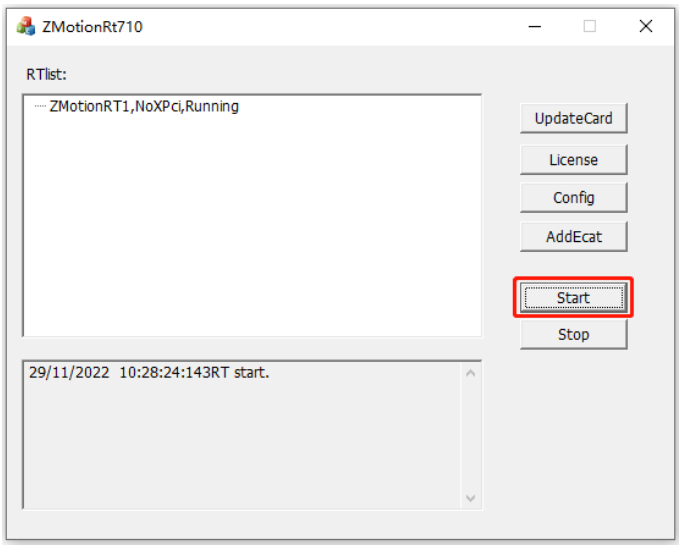
2.点击“Start”。
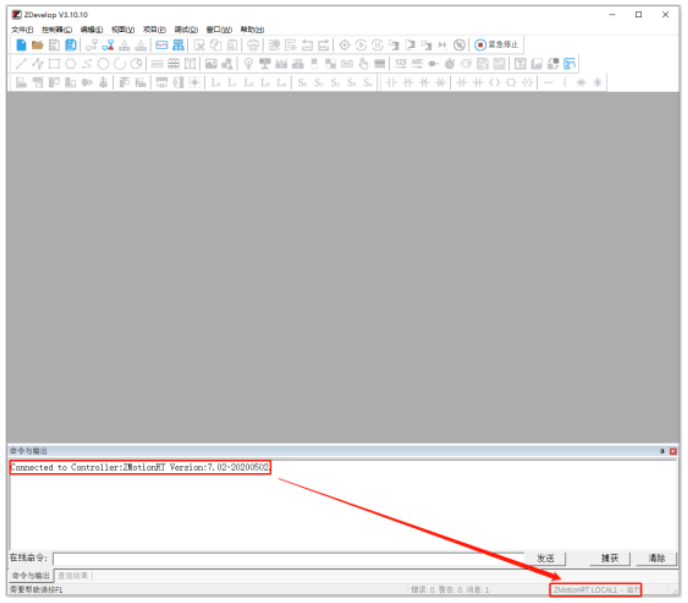
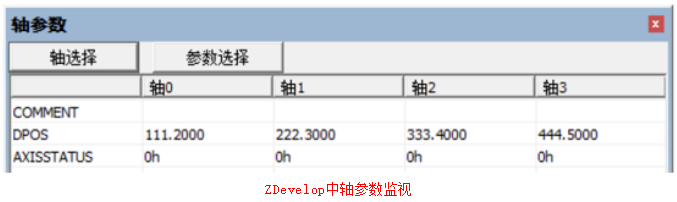
第三步:使用ZDevelop软件链接到控制器,进行参数监控
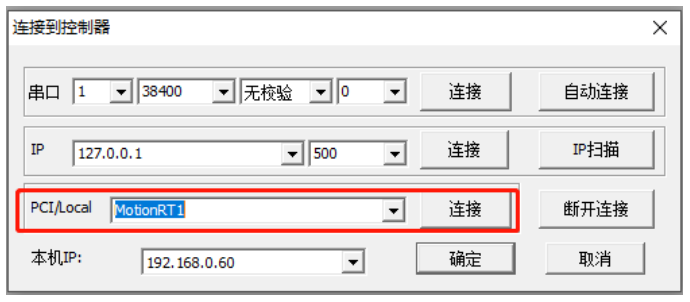
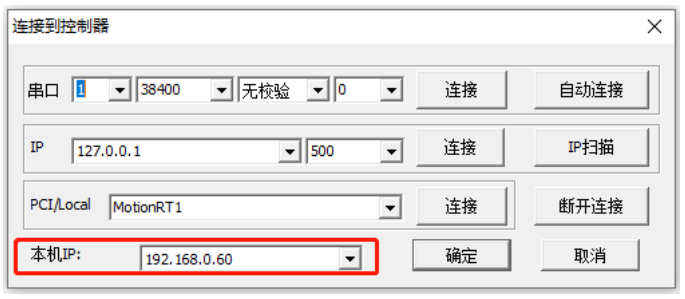
ZDevelop链接控制器,软件版本3.10以上,使用PCI/LOCAL方式进行连接。
第四步:网口扩展EtherCAT主站协议
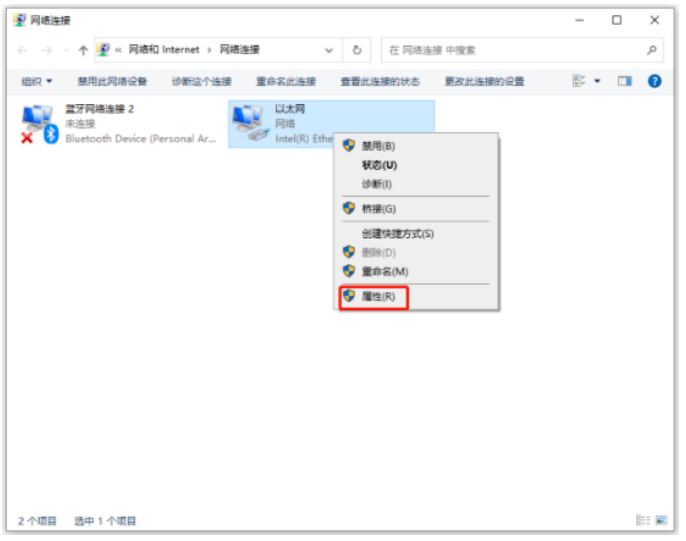
1.查看网络连接。
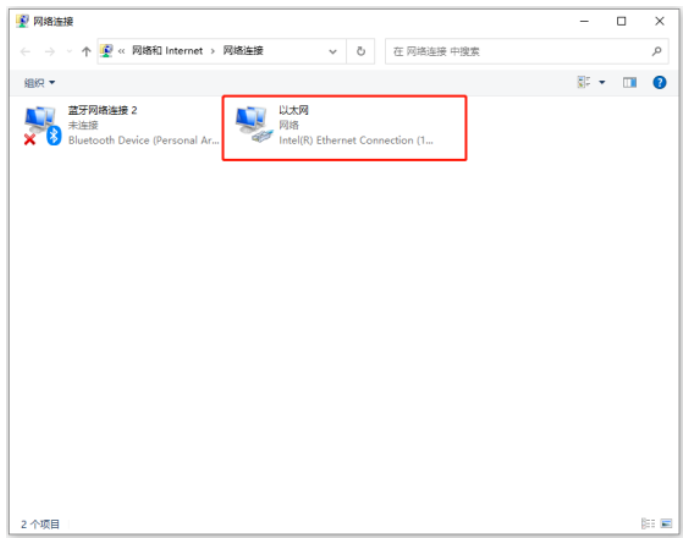
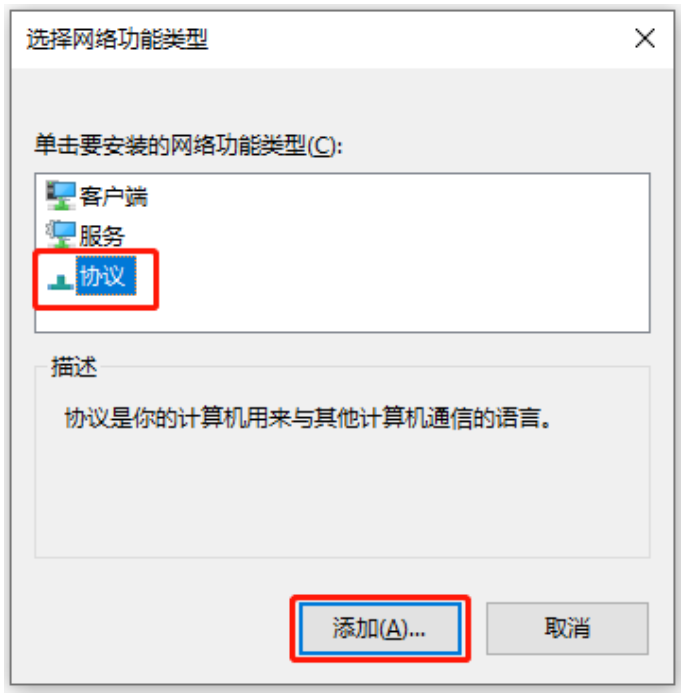
2.选择用作EtherCAT的网卡,右键属性,安装协议。
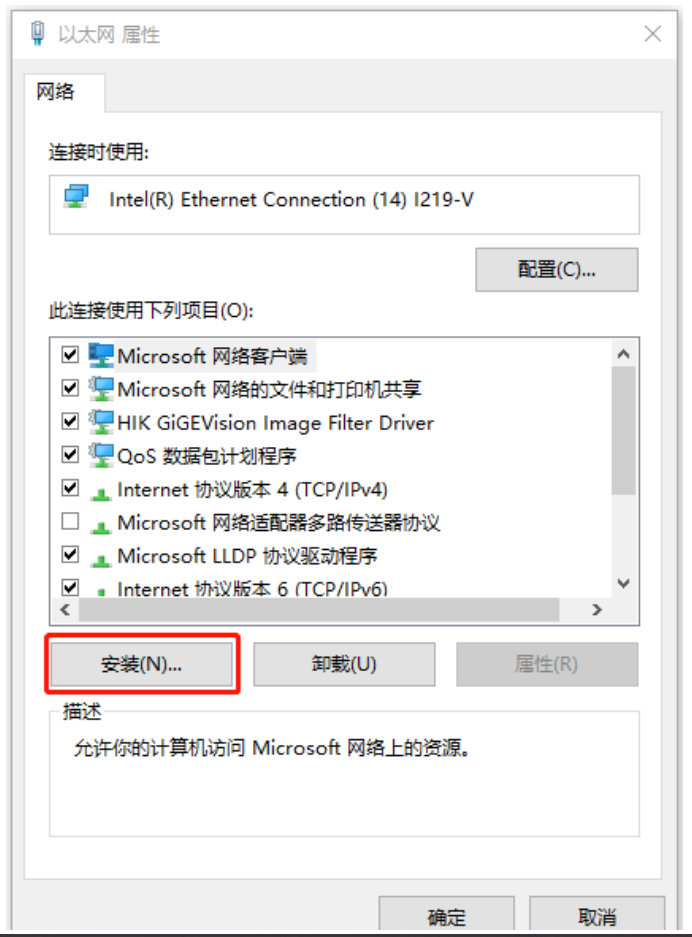
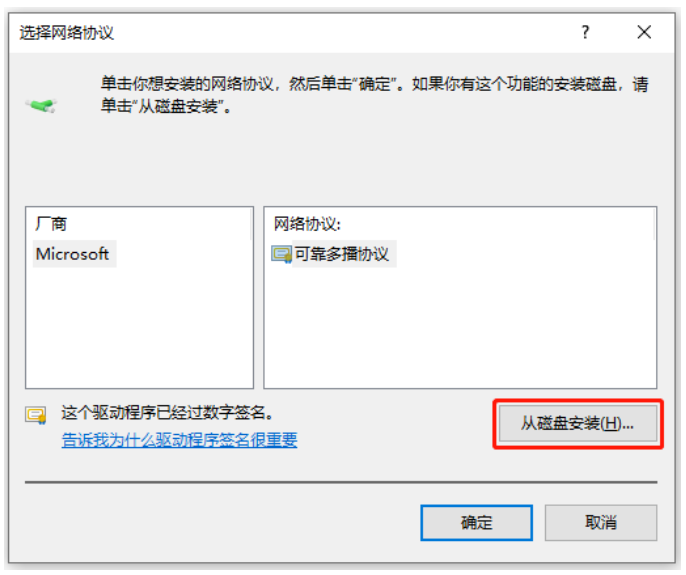
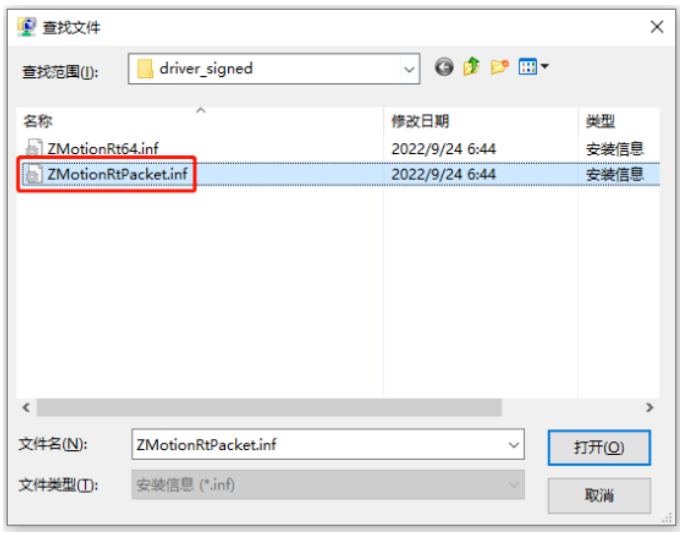
3.点击从磁盘安装,选择驱动器所在的路径,打开文件夹”driver_signed”,选择“MotionRtPacket.inf”。

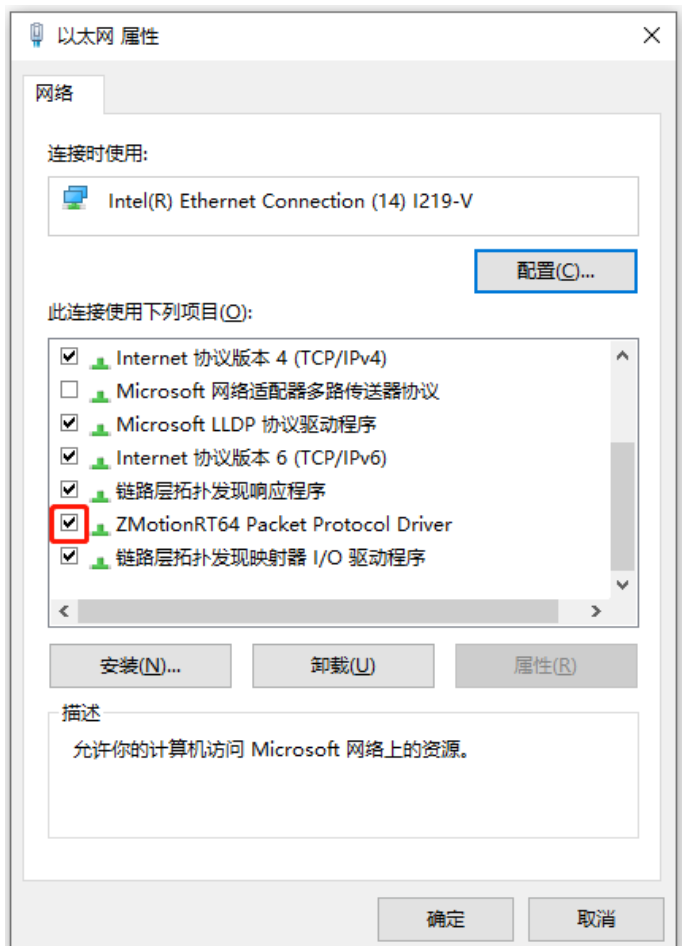
4.安装成功后,确认MotionRT64 Packet Protocol Driver前面有选上。
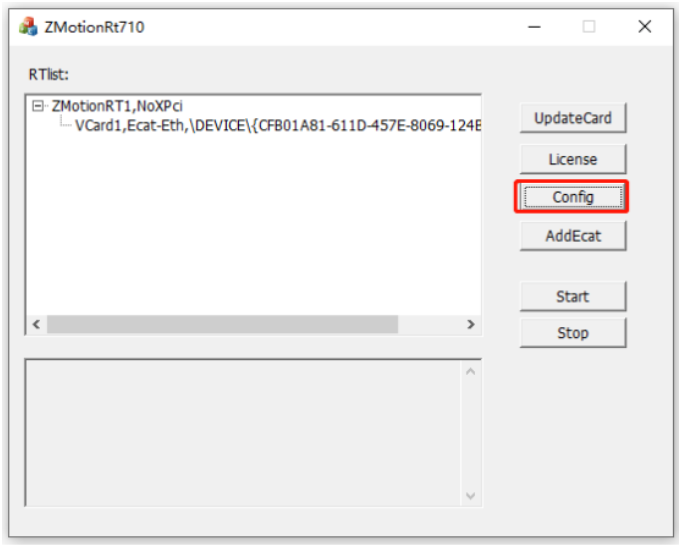
在RT控制台程序选择增加AddEcat,这时能看到对应网卡,选择上,然后启动RT。
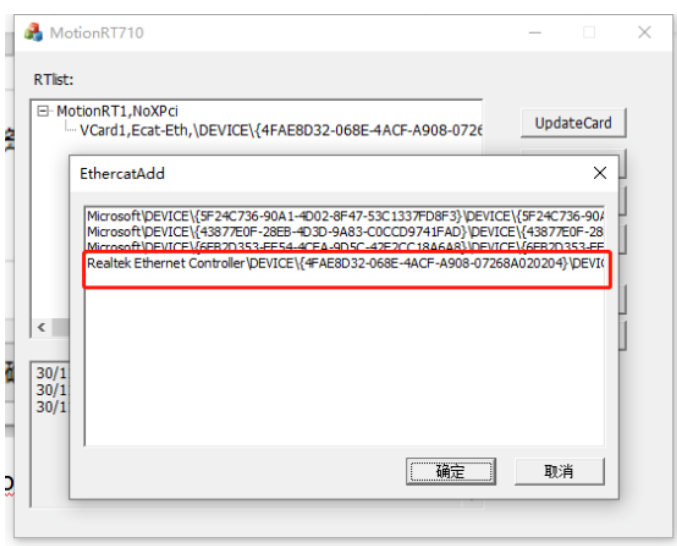
自带PC的网卡EtherCAT有一定的实时性,如EtherCAT要提升性能,需要把网口其它的协议都去掉以提升实时性。
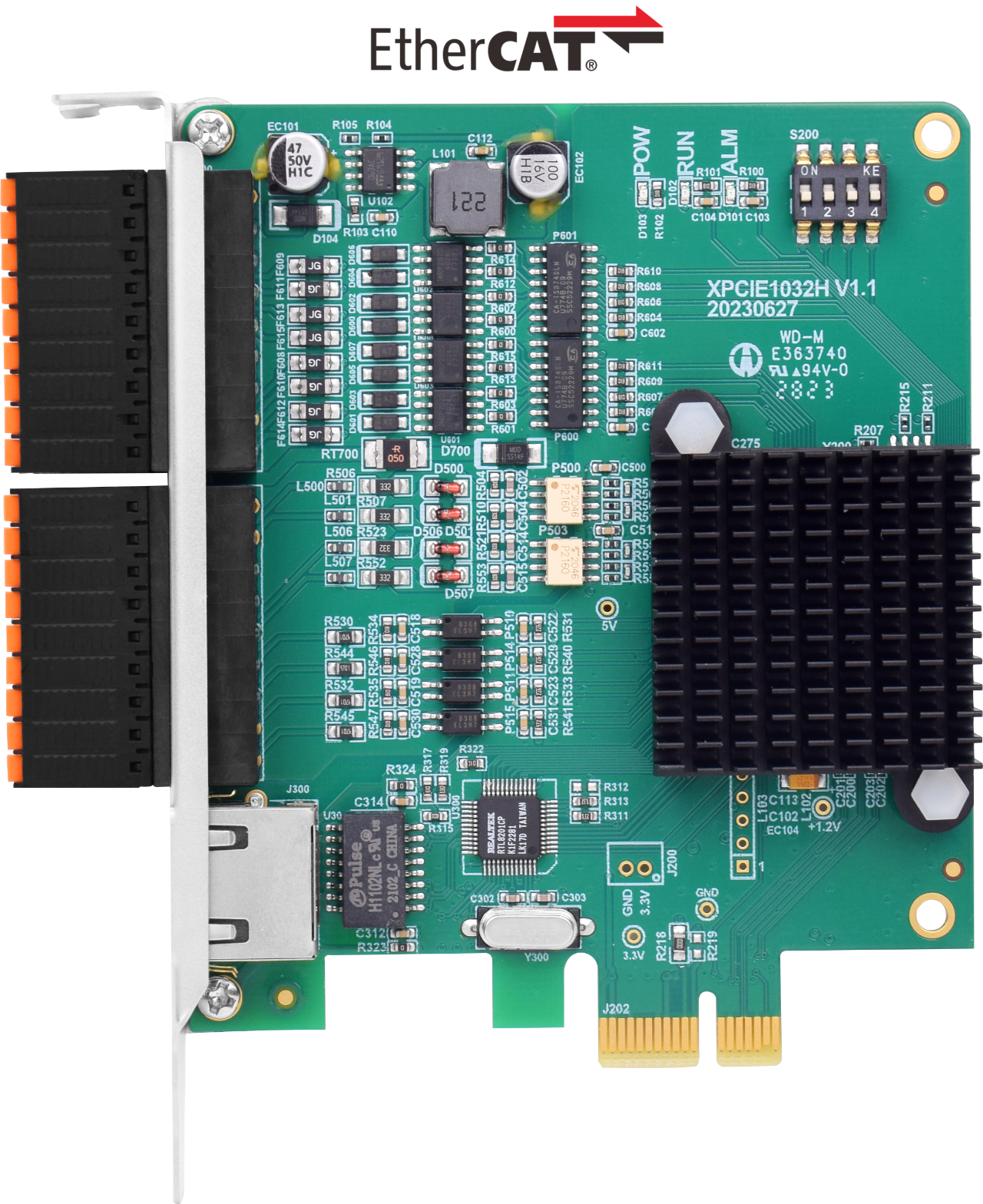
如需进一步提升实时性,请使用正运动专门的EtherCAT运动控制卡XPCIE1032。
更多关于MotionRT7的参数设置以及相关问题,请参照“MotionRT7说明书”。
相关资料请上正运动技术官网www.zmotion.com.cn或者联系正运动相关人员。
03 C#进行MotionRT7项目的开发(开发环境vs2022)
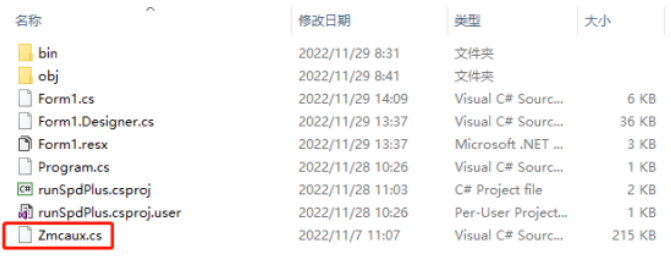
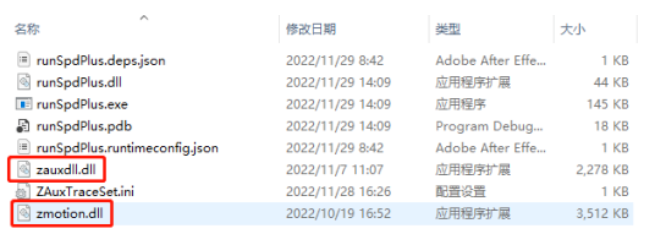
1.新建C#项目2.导入“Zmcaux.cs”,“zauxdll.dll”,“zmotion.dll”
(“Zmcaux.cs”放在项目文件中,与bin目录同级)
以x64为例,“zauxdll.dll”,“zmotion.dll”放在bin->x64->Debug->net6.0-windows。
3.相关功能开发(LOCAL高速接口测试,轴参数读取,输入口状态监视)
相关PC函数介绍
(1)找到需要用到的窗体组件界面。
(2)使用“Label” 组件作为状态显示或其它文本与数据的显示,用“Button” 组件来触发相关的函数,拖动左侧工具箱中对应的组件到界面中,并且进行属性或动作的配置即可。
(3)最终的界面效果图如下。
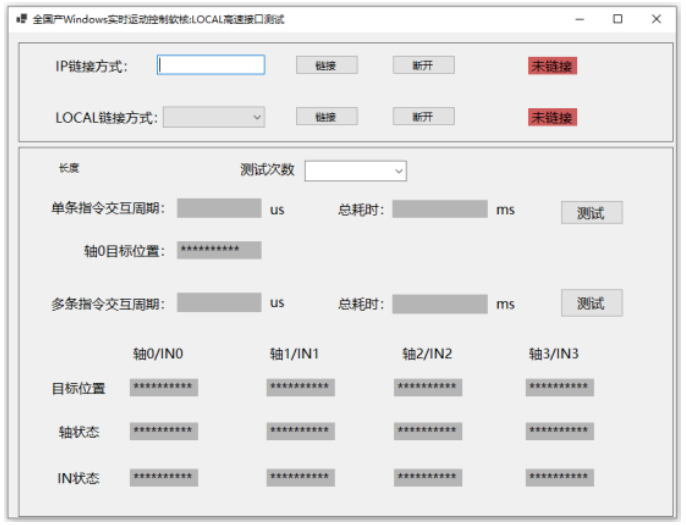
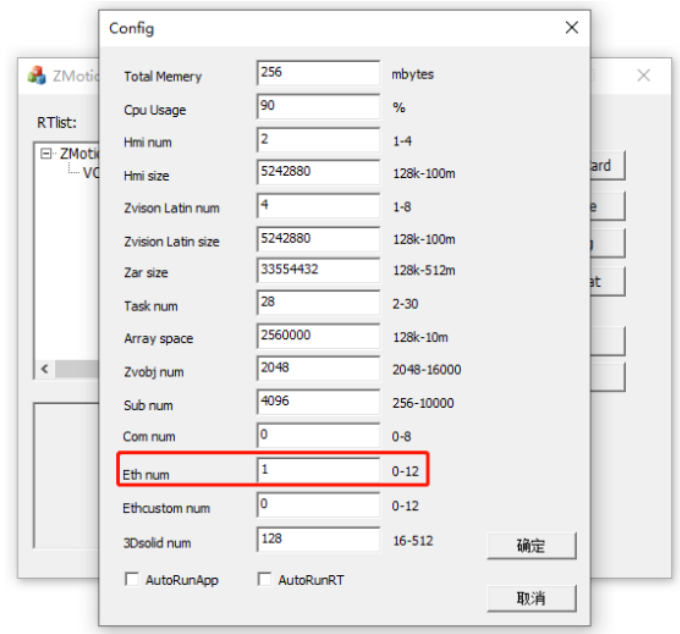
注:使用IP模式连接MotionRT7的时候,要将ZmotionRT710中的Config配置项Eth num的值设置为一个大于0的数(1-12),输入的ip为本机ip,可以在ZDevelop中直接查看。
4.相关代码
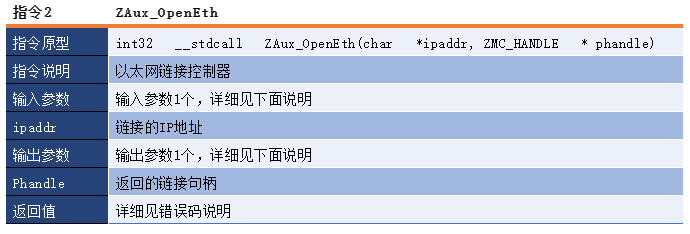
(1)通过IP链接方式的链接按钮的事件处理函数来连接控制器(IP链接方式)。
private void IPConct(object sender, EventArgs e)
{
//关闭控制控制器,保证handle为空
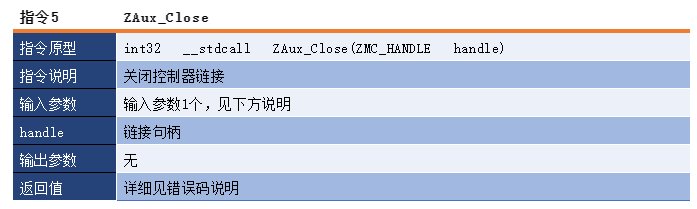
zmcaux.ZAux_Close(handle);
//网口方式连接
int ret = zmcaux.ZAux_OpenEth(textBox1.Text, out handle);
if(ret==0)
{
label2.Text = "已链接" + textBox1.Text;
label2.BackColor = Color.Green;
}
else
{
MessageBox.Show("链接失败,请输入正确的ip!");
}
}(2)通过IP链接方式的断开按钮的事件处理函数来断开控制器,对应IP链接方式的界面显示。
private void IPDisConct(object sender, EventArgs e)
{
//IPDisConct函数用于断开控制器的连接,对应网口连接方式
zmcaux.ZAux_Close(handle);
label2.Text = "未链接";
label2.BackColor= Color.IndianRed; ;
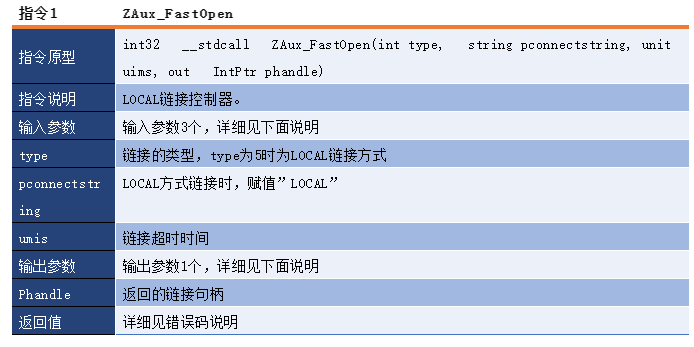
}(3)通过LOCAL链接方式的链接按钮的事件处理函数来连接控制器。
private void localConct(object sender, EventArgs e)
{
//LOCAL方式连接
int ret = zmcaux.ZAux_FastOpen(5,comboBox2.Text,1000,out handle); if (ret == 0)
{
label5.Text = "已链接" + comboBox2.Text;
label5.BackColor = Color.Green;
}
else
{
MessageBox.Show("链接失败,请选择正确的LOCAL!");
}
}(4)通过LOCAL链接方式的断开按钮的事件处理函数来断开控制器,对应LOCAL链接方式的界面显示。
private void localDisConct(object sender, EventArgs e)
{
//IPDisConct函数用于断开控制器的连接,对应LOCAL连接方式
zmcaux.ZAux_Close(handle);
label5.Text = "未链接";
label5.BackColor = Color.IndianRed; ;
}(5)通过单条指令交互周期的测试按钮的事件处理函数来计算单条指令的交互周期和总耗时。
private void run(object sender, EventArgs e)
{
//run函数用于测试单条指令交互周期与总耗时
float dpos = 0;
// beforeDT记录交互指令前的时刻
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
//进行n次单指令交互
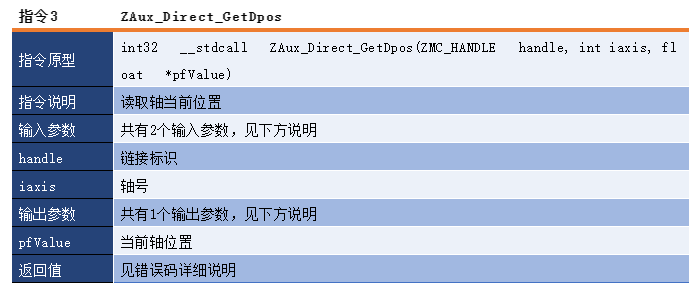
zmcaux.ZAux_Direct_GetDpos(handle, 0, ref dpos);
}
//afterDT记录交互指令前的时刻
DateTime afterDT = System.DateTime.Now;
//计算beforeDT与afterDT的时间差
TimeSpan ts = afterDT - beforeDT;
//将ts转换成ms并显示(总耗时)
label11.Text = (ts.TotalMilliseconds).ToString();
//计算单条指令交互周期并显示
label8.Text = ((ts.TotalMilliseconds * 1000) /(Convert.ToInt32(comboBox3.Text))).ToString();
label14.Text = dpos.ToString();
}(6)通过多条指令交互周期的测试按钮的事件处理函数来计算多条指令的交互周期和总耗时。
private void runMuch(object sender, EventArgs e)
{
int []status = {0, 0 , 0 ,0};
float []dpos = { 0, 0, 0, 0 };
uint []num = { 0, 0, 0, 0 };
string cmd;
int star = 0;
StringBuilder cmdBuff = new StringBuilder(2048);
string[] tmp = new string[12];
cmd = "?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)";
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < Convert.ToInt32(comboBox3.Text); i++)
{
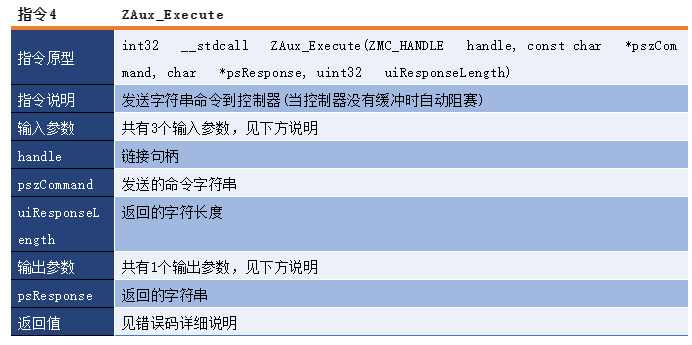
zmcaux.ZAux_Execute(handle, cmd, cmdBuff, 2048);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label23.Text = (ts.TotalMilliseconds).ToString();
label16.Text = ((ts.TotalMilliseconds * 1000) / (Convert.ToInt32(comboBox3.Text))).ToString();
string s = cmdBuff.ToString();
string[] arrS = new string[20];
for(int i = 0;i;i++)>
5.运行效果



LOCAL链接方式的测试(1w次)
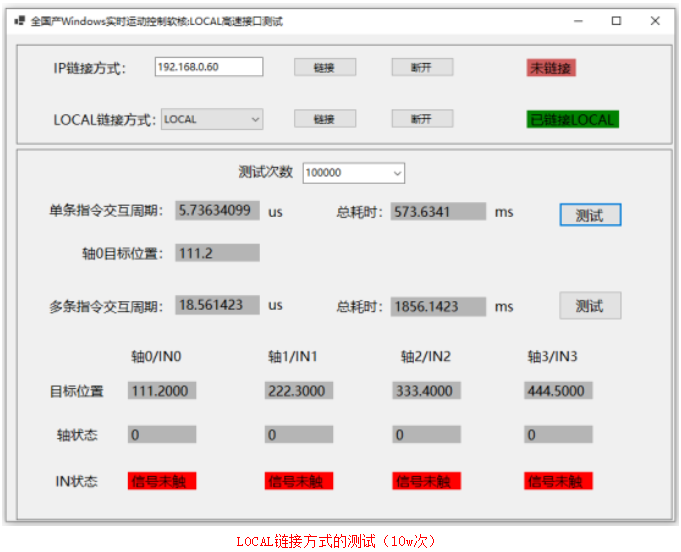
5.分析与结论
以上分别是对IP方式链接MotionRT7与LOCAL方式链接MotionRT7的指令交互测试,从上面的运行效果图的数据显示来看,可以看出当进行1w次和进行10w次的单指令交互或多指令交互的时候,LOCAL链接的方式进行指令交互所需要的单条指令交互时间(平均5us左右),一次性读取12个状态的多条指令交互时间(平均18us左右)都是要比IP链接的方式更快(平均31us左右与119us左右)。
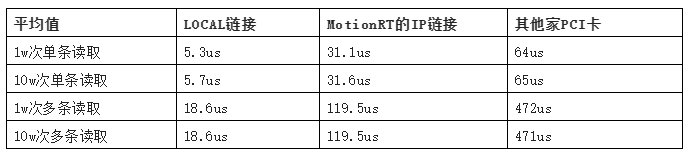
其次,我们可以从运行结果看出MotionRT7在LOCAL链接的方式下,指令交互的效率也是非常地稳定,当测试数量从1w增加到10w时,单条指令交互时间与多条指令交互时间波动不大,这将为工艺作业中稳定性提供了极大的保证。
MotionRT7的出现,无非是一次重大的惊喜与升级,它为我们在进行大批量指令交互的过程中,提供了更好的效率与稳定性,给生产创造更高的效率与更多的价值!
相关的函数请参照“ZMotion PC函数库编程手册”。
本次,正运动技术Windows实时运动控制软核(一):LOCAL高速接口测试之C#,就分享到这里。
-
运动控制器
+关注
关注
2文章
422浏览量
24947 -
WINDOWS
+关注
关注
4文章
3588浏览量
90119 -
高速接口
+关注
关注
1文章
54浏览量
14857 -
运动控制
+关注
关注
4文章
608浏览量
33120 -
locale
+关注
关注
0文章
11浏览量
1214
发布评论请先 登录
相关推荐
Windows实时运动控制软核(七):LOCAL高速接口测试之Labview


Windows实时运动控制软核(一):EtherCAT协议安装视频演示# 正运动技术# 运动控制器# 运动控制


正运动自主研发实时软核MotionRT7与Labview单轴点动例程开发
MotionRT7实时运动控制使用:LOCAL高速接口测试之C#
Windows实时运动控制软核(三):LOCAL高速接口测试之C++

MotionRT7的安装和使用:LOCAL高速接口测试
Windows实时运动控制软核(四):LOCAL高速接口测试之VB.NET

Windows实时运动控制软核(五):LOCAL高速接口测试之VC6.0

Windows实时运动控制软核(六):LOCAL高速接口测试之Matlab
Windows实时运动控制软核(五):LOCAL高速接口测试之VC6.0
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发





 工商网监
工商网监
评论