 ZL-CT CT仿真虚拟实验系统
ZL-CT CT仿真虚拟实验系统

医学影像设备是医学影像技术相关专业的重要教学内容,因此不仅应掌握医学影像设备的工作原理,还应对其操作规范有一定了解。安徽耀坤ZL-CT仿真虚拟实验系统应用主流的CT设备和操作系统界面可完成理论知识、模拟视频、模拟仿真操作、人机考试模拟仿真整个CT系统的工作流程,对学生的规范化实训与教学工作。CT仿真虚拟实验系统模拟CT教学系统设备按照医院CT室布局标准建设。
应用主流的CT设备和操作系统界面可完成理论知识、模拟视频、仿真操作、图像后处理动态显示、人机考试整个CT系统的工作流程,同时,可以拓展AI、VR、MR的接口。诊断报告模板系统、图像后处理、PACS、可以配合硬件操作指导下接端口达60个以上操作台对学生的规范化实训与教学工作。CT模拟仿真系统具有系统操作手册。
1.控制软件包含理论知识、包括技师职业素质,CT设备结构与组成,CT设备原理,CT检查技术工作流程、临床应用,CT图像质量控制等。规范化操作流程视频、包括开关CT设备,灯丝预热,空气校正,接待被检查者,各部位扫描,控制台操作,送被检查者。仿真系统、包括从头部到足部平扫描与增强扫描、图像处理,图像排版与摄影。图像后处理动态显示、3D、CTA、冠状动脉扫描等。人机考试、可以进行对错分析,分数,时间显示。报告诊断模板、图像处理与图像后处理系统。
2.扫描(SCAN)模块必须具备新建病人信息功能:包含Exam Number(检查号)、Accessions Number(附加号)、Patient ID(病人识别号)、Patient Name(病人姓名)、Birthdate(出生年月)、Sex(性别)、Age(年龄)、Weight(体重)、Exam Description(检查部位描述)等信息
3.扫描(SCAN)模块必须包含头颅、胸部、腹部、膝关节等至少13个以上扫描部位选取功能,具有中英文对照显示,每一个扫描部位中 至少包含 普通平扫、螺旋扫描、增强扫描 、增加或者减少扫描序列。每一个扫描过程操作、显示增强剂量、速度、时间、辐射剂量显示、能肝脏分期扫描、肾脏分期扫描、腰椎椎体与椎间盘分别扫描有CTA、3D、冠状动脉成像过程动态显示方案。
4.可设置病人体位的选择:头先进、脚先进、侧位等,可以进行各种定位线名称选择调整等。
5.具备CT球管预热和探测器校准模块、开、关设备、快、慢扫描床进入操作、错误提醒系统。
6.定位线设定,自动显示定位区域框,可调节定位区域大小,左右、倾斜角度调整,显示定位线向基准线的选择、可以改变定位线名称,增加或者减少序列
7.执行扫描,可选择扫描类型4种、起始点数值显示与改变,层数显示与改变,螺距显示与改变,用探测器排数显示与改变,扫描速度显示与改变,层厚度显示与改变,机架角度显示与改变,改变KV、MA、S、FOV等参数调整,系统会象真实CT 机器一样在图像显示区实现扫描图像一幅紧接一幅动态显现的整个过程,同时扫描模拟进度条一直前行直到图像扫描完成,扫描出的图像必须与扫描方案一致。增强扫描 必须显示增强CT图像。排版各种方案、单、多幅、图像定位线显示、快捷摄影,拍片、窗宽、窗位、骨窗、脑窗、纵膈窗、图像处理、发送、肺窗、可增加老师指导综合性图像处理(DR、CT、MR)教学、训练、练习工作站软件。
9.可进行病人信息数据管理。人机考试系统可以打出分数、回顾性对错。系统技能比赛打出分数、编号、对错分析等。具有指向性考题与增加考试卷和升级功能。
10.图像处理功能:包含多幅显示、局部放大、任意旋转、正负像、显示定位像中的扫描线等。
11.图像测量功能:包含长度、曲线、间隙、面积和CT值测量等方式。
12.三维重建功能:包含体积重建(VR)、曲面重建(CPR)、多平面重建 (MPR)等处理功能。
13.标准诊断报告系统模块:私人报告模板与公共报告模板,满足图文报告的需求。可以连接PACS远程诊断。
14.胶片打印模块,多种胶片窗分格,单、多幅或者一键成像等与激光胶片打印机相连后可打印胶片
CT硬件
一、应用主流的CT设备和操作系统界面可完成理论知识、模拟视频、模拟仿真操作、人机考试模拟仿真整个CT系统的工作流程,对学生的规范化实训与教学工作。模拟CT教学系统设备按照医院CT室布局标准建设。
二、设备主要组成
1. 扫描床
2. 扫描机架
3.主机控制软件工作站
4 .遥控控制台
三、CT硬件主要技术参数
1. 扫描床
1.1 床面尺寸≥400mmx1900mm
1.2水平运动范围≥1200mm
1.3 垂直运动范围≥300mm
1.4床面*高距离地面:≥850mm
1.5 床面*低可降至离地面距离:≤550mm
1.6 扫描床承载重量≥120kg
1.7按照软件扫描模式可以步进及连续进出床
1.8提供头托、床垫等扫描附件
2 .扫描机架
2.1机架尺寸:≥1700x1700x800mm
2.2 旋转方式:定位/螺旋(扫描指示灯)
2.3 机架孔径≥700mm
2.4 机架倾斜角度≥ +/- 24度
2.5 驱动方式:三相异步电动机
2.6 机架激光定位系统:X/Y/Z方式
2.7机架两侧分别各带一块控制面板,具备控制床面升降、前后运动、机架倾斜运动,控制激光定位系统、“急停”等按钮,机架顶侧具有液晶显示屏,可显示各项机械运动参数
2.8扫描机架配备模拟灯光系统,在软件的相关体位扫描模式下同步自动触发,模拟扫描机架的内部旋转与灯光显示。
2.9 机架外形款式要与目前CT机外形一致。
审核编辑黄昊宇
-
仿真
+关注
关注
55文章
4539浏览量
138705 -
CT
+关注
关注
2文章
206浏览量
34961 -
影像设备
+关注
关注
0文章
15浏览量
2397
发布评论请先 登录
CT-6101-O铁氧体隔离器
CT式电表深度解析:原理、优势与实用场景

CI/CT自动化测试解决方案

CT-4032-O/CT-4031-N铁氧体隔离器
东软医疗NeuViz P10碲锌镉光子计数CT获批上市
CT-4028-O/CT-4027-N铁氧体隔离器
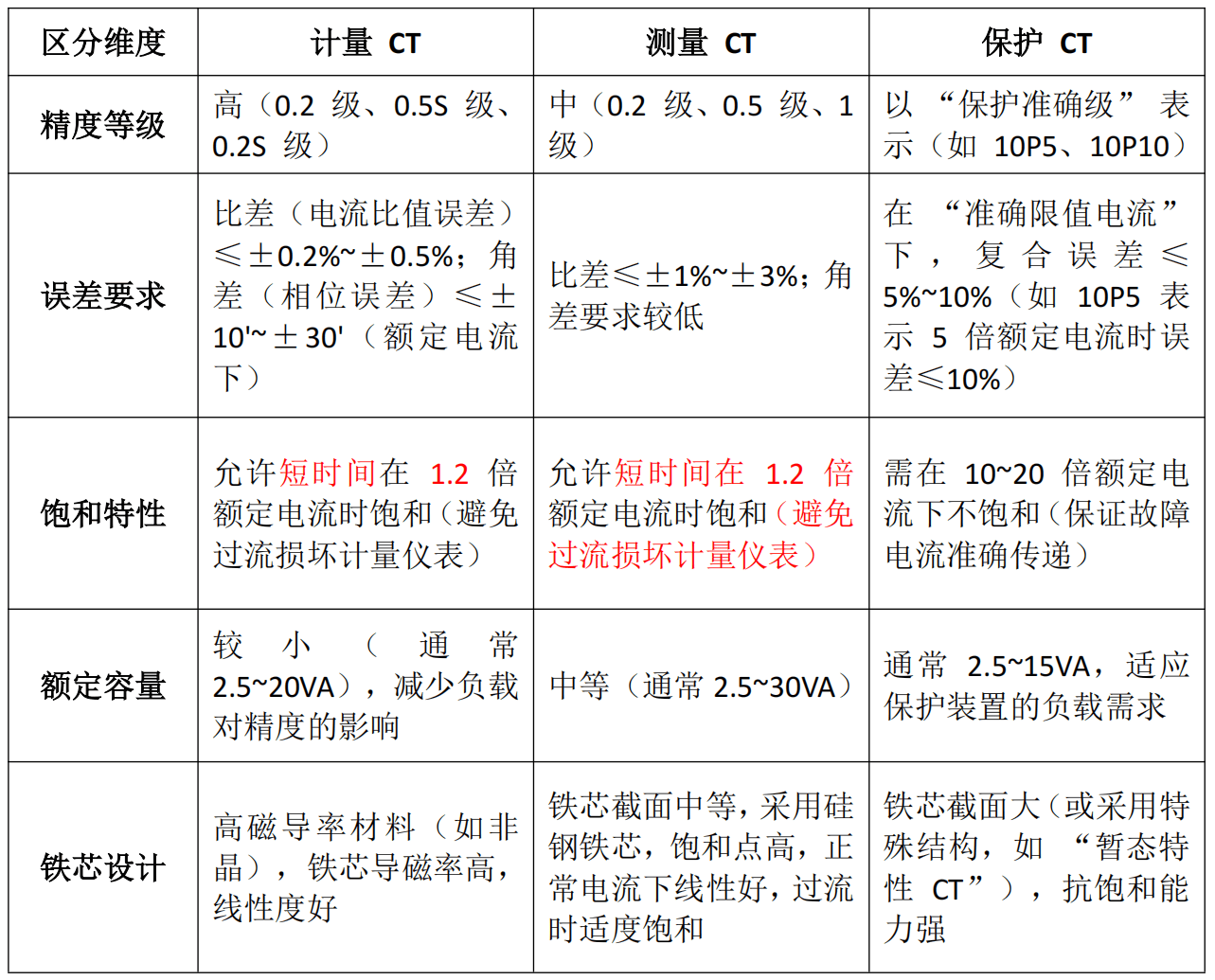
为什么计量 CT、保护 CT 和测量 CT 总是被搞混?如何正确选择合适的 CT?
CT二次侧过电压保护机制及实现方式
微小井眼电机驱动CT牵引器控制系统设计
老文章新视角:从静态测试到CI/CT生态的进化



评论