 AUTOSAR架构下CanNM User Data的概念及配置
AUTOSAR架构下CanNM User Data的概念及配置
前言
CanNm模块配置完成后,基本不需要和其他非标准AUTOSAR模块进行交互,但是User Data的使用可以通过SWC-->RTE-->COM方式使用,也可以通过CDD直接Set/Get User Data的方式使用,在实际配置的时候还是遇到了几个困惑的问题:
(1)CanNm的User Data可以通过CDD和COM模块同时使用吗?
(2)CanNmUserDataTxPdu配置容器里面的CanNmTxUserDataPduRef配置参数引用的PDU和CanNmTxPdu配置容器里面的CanNmTxPduRef配置参数引用的PDU是同一个PDU吗?
(3)DBC文件包含NM Rx PDU和NM Tx PDU时导入AUTOSAR配置工具后会在EcuC模块自动生成全局NM Rx和NM Tx的PDU(Global PDU)应用参数,但是不会生成CanNmTxUserDataPduRef引用的配置参数,也不会生成Com2CanNm的路由表信息,这些该怎么配置?
(4)CanNm User Data数据在SWC-->Rte-->Com-->PduR-->CanNm模块间是怎样完成数据交互的?
本文就先介绍CanNM User Data的概念及配置,然后来回答这些问题。
正文
1.CanNm user data概念
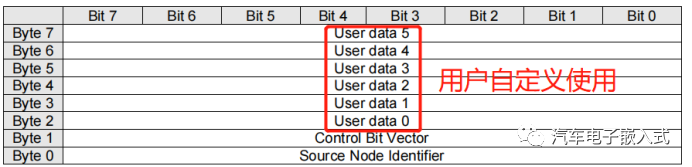
CanNm发送(Nm Tx)帧是8字节数据帧,标准AUTOSAR CAN网络管理发送帧只使用了Byte 0和Byte 1,Byte 0-Byte 7用户可以根据需求自定义使用。
Note: 一般用CanNm发送报文的Byte0-Byte7存储和网络管理相关的唤醒源信息(IGn,四门两盖等本地唤醒信号)。
AUTSOSAR规范两种访问CanNm User Data方式:
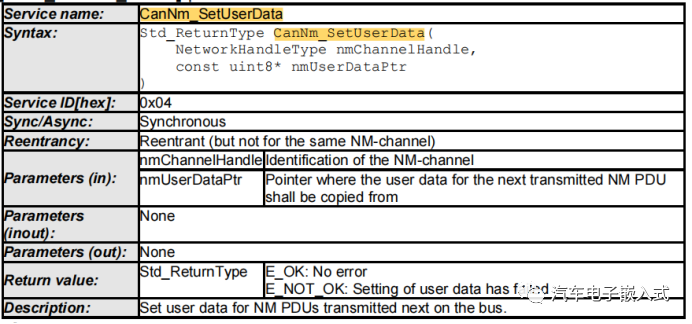
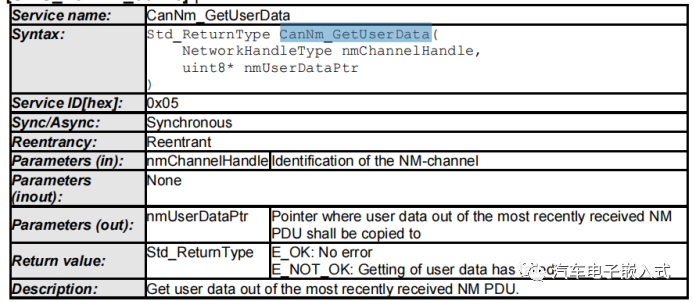
(1)CDD直接访问。CDD使用标准接口CanNm_SetUserData和CanNm_GetUserData来设置和获取CanNm中User Data数据。
(2)SWC->RTE->COM访问。Com模块中配置发送CanNm User Data的ComIpdu,IPDU中包含用户自定义的Signal,SWC和Com Signal之间进行Pport-Rport连接产生RTE数据读写接口,SWC通过RTE接口Write Signal,Com模块将Signal组包到CanNm User Data所在的IPDU。PDUR模块的路由表中有Com to CanNm的路由表信息,CanNm_MainFunction会在准备发送CanNm Tx报文的时候调用PduR_CanNmTriggerTransmit-->Com_TriggerTransmit以Trigger方式从Com模块获取到CanNm User Data,然后填充到CanNm Tx报文的byte 0-->Byte 7完成user data的获取与发送。
2.CanNm user data配置
2.1CDD方式访问CanNm user data
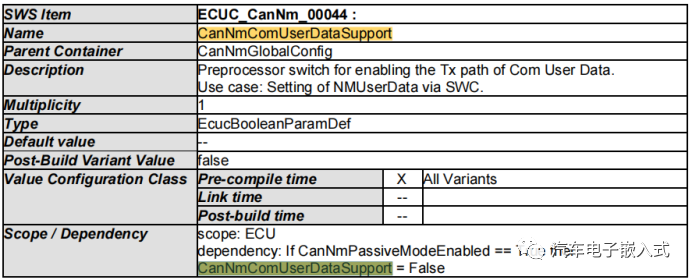
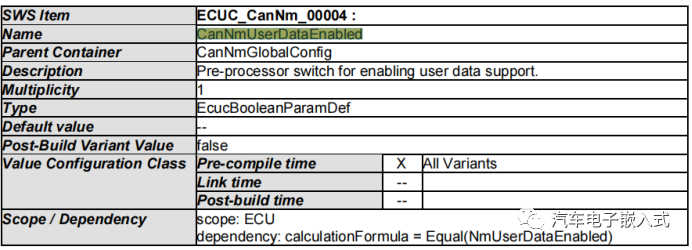
CanNmGlobalConfig配置容器里的CanNmComUserDataSupport配置参数需要配置为False,CanNmUserDataEnabled配置参数需要配置为True,不能配置CanNmUserDataTxPdu这个配置容器。

NmGlobalConfig配置容器里的NmComUserDataSupport配置参数需要配置为False,NmUserDataEnable配置参数配置为True。
2.2 ASW方式访问CanNm user data
基础知识:数据在CAN通信协议栈各层间都是以PDU(Protocol Data Unit)形式传输的,为了将各层PDU关联起来,则需要定义全局PDU(Global PDU)。由于全局PDU不属于任何一个标准BSW模块,所以AUTOSAR提出了一个EcuC模块来收集一些配置信息。
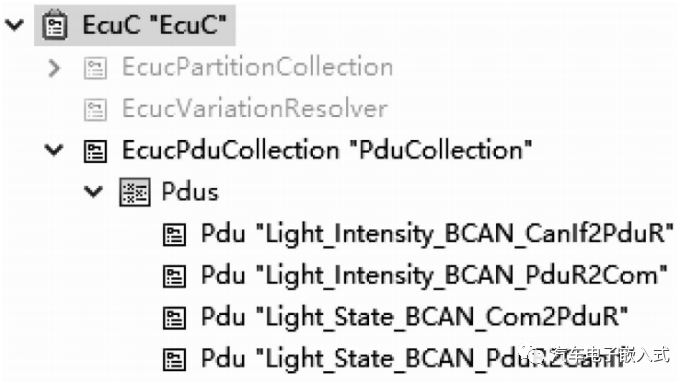
对于一个发送PDU_xxx,路由信息如果是从Com-->PDUR->CanIf的话,在我们导入DBC文件到AUTOSAR配置工具(ISOLAR或Davinci)的时候,配置工具会自动在EcuC产生PDU_xxx_Com2PduR和PDU_xxx_PduR2CanIf的全局PDU引用信息,然后同时产生以下配置信息:
1)在Com模块的ComIPdus配置容器中的具体PDU_xxx这个ComIpdu会引用PDU_xxx_Com2PduR。
2)在PduR模块的路由容器PduRRoutingPaths中会产生一个Dest引用PDU_xxx_PduR2CanIf且Src引用PDU_xxx_Com2PduR的路由信息。
3)在CanIf模块的CanIfTxPduCfg发报文配置容器中PDU_xxx会引用PDU_xxx_PduR2CanIf。
这样就自动完成发送源(Src)Com经过PduR(路由信息,Src to Dest)路由到CanIf(Dest)的报文配置过程。
然后回到今天这个主题的关键问题:对于CanNm Rx PDU和Tx PDU因为没有经过PDUR路由的需求,而是CanNm<-->CanIf经过CanIf收发CanNm报文,这样在EcuC模块只会存在一个xxx_NM_CanNm2CanIf和一个CanIf2CanNm全局PDU的引用信息。但是我们要是使用COM模块来访问CanNm的User Data时必须要要使用PduR进行路由,且在配置CanNmUserDataTxPdu容器时的CanNmTxUserDataPduRef配置参数必须引用一个来自PduR2CanNm的PDU引用,该怎么配置?
所以:需要我们手动配置EcuC,Com,PduR,CanNm,NM模块来实现CanNm User Data从Com到CanNm的路由,然后SWC和COM经过Signal mapping通过RTE完成数据的交互就完成了整个配置过程。
1)第一步我们需要手动在EcuC添加两条关于NM发送报文的PDU的全局引用NM_xxx_Com2PduR,NM_xxx_PduR2CanNm。
2)在在Com模块配置一个ComIpu配置容器并引用EcuC中的NM_xxx_Com2PduR
3)在PduR模块配置一条从Com到CanNm的路由信息,PduRSrcPdu容器引用NM_xxx_Com2PduR,PduRDestPdu容易引用NM_xxx_PduR2CanNm
4)在CanNm模块的CanNmUserDataTxPdu容器中CanNmTxUserDataPduRef参数引用NM_xxx_PduR2CanNm
5)配置CanNm,NM模块支持Com user data support
CanNmGlobalConfig配置容器里的CanNmComUserDataSupport配置参数需要配置为True,CanNmUserDataEnabled配置参数需要配置为True。
NmGlobalConfig配置容器里的NmComUserDataSupport配置参数需要配置为True,NmUserDataEnable配置参数配置为True。
这样就完成了Com通过PduR完成对CanNm中user data的数据访问。
Note: 在手动配置ComIpdu和CanNM模块的时候还会有一些子模块需要添加,这些在具体操作的时候根据报错提示加上即可。
3.问题回答
问题1:CanNm的User Data可以通过CDD和COM模块同时使用吗?
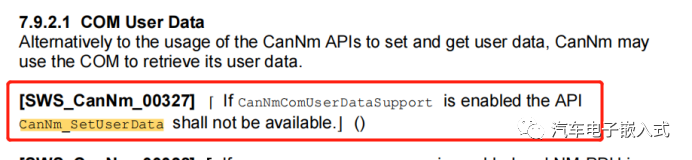
答:不能。配置了CanNmComUserDataSupport后就不能使用CanNm_SetUserData了,也就是说CDD不能再访问CanNm的user data了。
问题2:CanNmUserDataTxPdu配置容器里面的CanNmTxUserDataPduRef配置参数引用的IPUD和CanNmTxPdu配置容器里面的CanNmTxPduRef配置参数引用的PDU是同一个PDU?
答:不是同一个EcuC模块中的PDU全局引用,EcuC模块只会自动创建NM_xxx_CanNm2CanIf和NM_xxx_CanIf2CanNm的全局PDU引用,NM_xxx_Com2PduR和NM_xxx_PduR2CanNm的PDU全局引用需要手动创建。CanNmUserDataTxPdu配置容器里面的CanNmTxUserDataPduRef配置参数引用的是NM_xxx_PduR2CanNm,CanNmTxPdu配置容器里面的CanNmTxPduRef配置参数引用的是NM_xxx_CanNm2CanIf。
问题3:CCan.DBC文件包含NM Rx PDU和NM Tx PDU时导入AUTOSAR配置工具后会在EcuC模块自动生成义全局NM_Rx和NM_Tx的PDU(Global PDU)应用参数,但是不会生成CanNmTxUserDataPduRef应用的配置参数,已经不会生成ComToCanNm的路由表信息,这些该怎么配置?
答:通过手动配置EcuC,Com,PduR,CanNm,NM模块实现。详见2.2 ASW方式访问CanNm user data。
问题4:CanNm User Data数据在SWC-->Rte-->Com-->PduR-->CanNm模块将是怎样完成数据交互的?
答:Com中包含发送CanNm User Data的IPDU,IPDU中包含用户自定义的Signal,ASW和Com Signal之间进行Pport-Rport连接产生RTE数据读写接口,ASW通过RTE接口Write Signal,Com模块将aSignal组包到CanNm User Data所在的IPDU。PDUR模块的路由表中有Com to CanNm的路由表信息,CanNm_MainFunction会在准备发送CanNm Tx报文的时候调用PduR_CanNmTriggerTransmit-->Com_TriggerTransmit以Trigger方式从Com模块获取到CanNm User Data,然后填充到CanNm Tx报文的byte 0-->Byte 7完成user data的获取与发送。
审核编辑:郭婷
-
接口
+关注
关注
33文章
8474浏览量
150776 -
PDU
+关注
关注
0文章
93浏览量
16957
原文标题:AUTOSAR架构下CanNm User Data详解
文章出处:【微信号:汽车电子嵌入式,微信公众号:汽车电子嵌入式】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
极海半导体推出AUTOSAR MCAL软件包和配置工具

AUTOSAR解决方案 — INTEWORK-EAS-AP

AUTOSAR架构下,持续集成CI的最佳实践

首款支持AUTOSAR车规MCU亮相AUTOSAR中国日

TC387配置Autosar OS后主核跑飞了怎么解决?
CX3开发平台是否能在SPI FLASH内放入User Data ?
pSoC63的sflash_user_data能用作用户自定义的flash吗?
相位噪声的概念及其应用

谐波失真的概念及影响 示波器如何检测谐波失真?
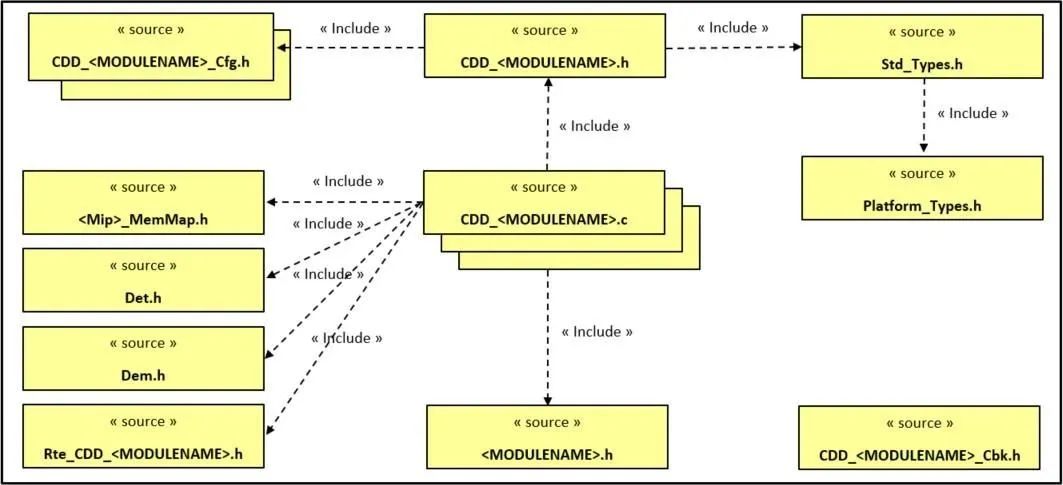
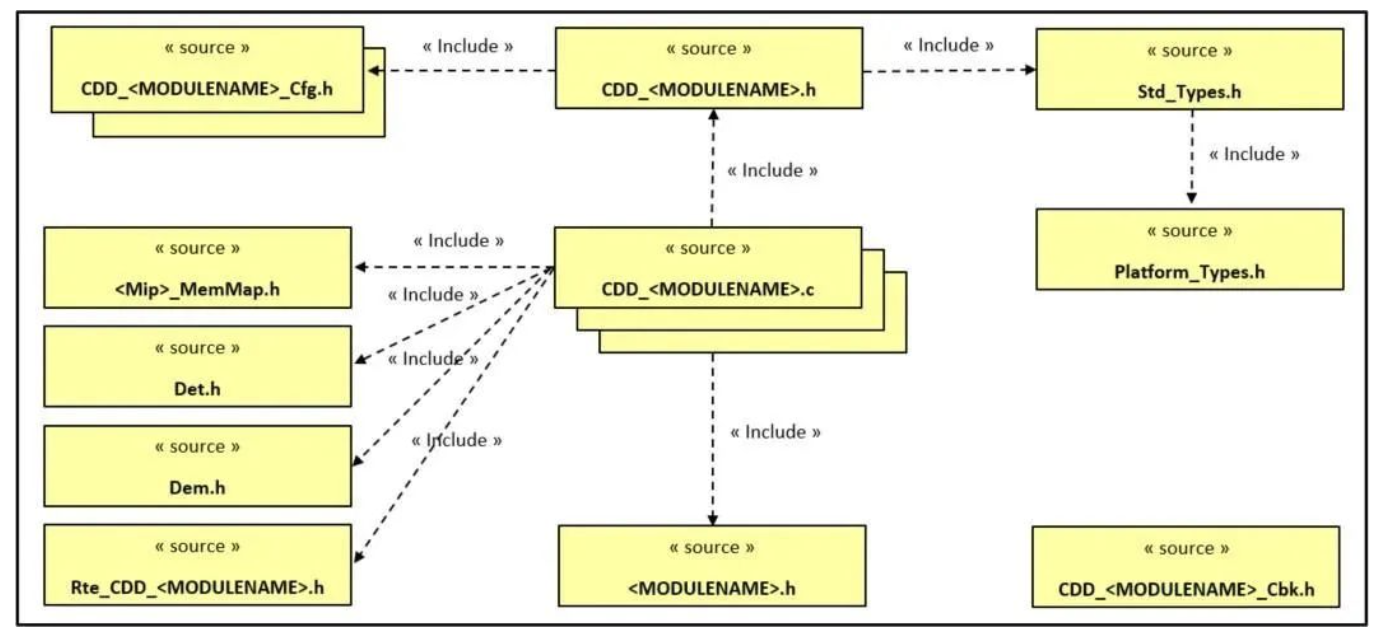
AUTOSAR架构中复杂驱动设计

分析Autosar架构下的NVM源码
复杂驱动如何将现有的或新的概念引入AUTOSAR软件架构中的?





 工商网监
工商网监
评论