 微型伺服电缸成为人形机器人核心运动部件
微型伺服电缸成为人形机器人核心运动部件
当地时间9.30日,特斯拉2022 AI Day在加州如期举行,马斯克预热已久的人形机器人擎天柱Optimus在全球注目下被工程师缓缓推了出来。这场长达6个小时的发布会,从Tesla Optimus的结构、原理、硬件、软件、应用和展望等众多角度进行了全方位细致的说明。
虽然从现场表现来说,特斯拉的人形机器人并没有达到公众对“钢铁侠”的预期,但这场发布会还是在驱动原理、运动控制和硬件结构等方面给我们带来了一些新的启示和技术路径方向。
作为以电机驱动为主要方式的人形机器人,擎天柱Optimus共有28个运动关节,其中包括三种旋转执行器和三种线性执行器。驱动原理一种是基于无框力矩电机+谐波减速器的旋转关节,另一种是基于力矩电机+滚柱丝杠的线性关节方式。
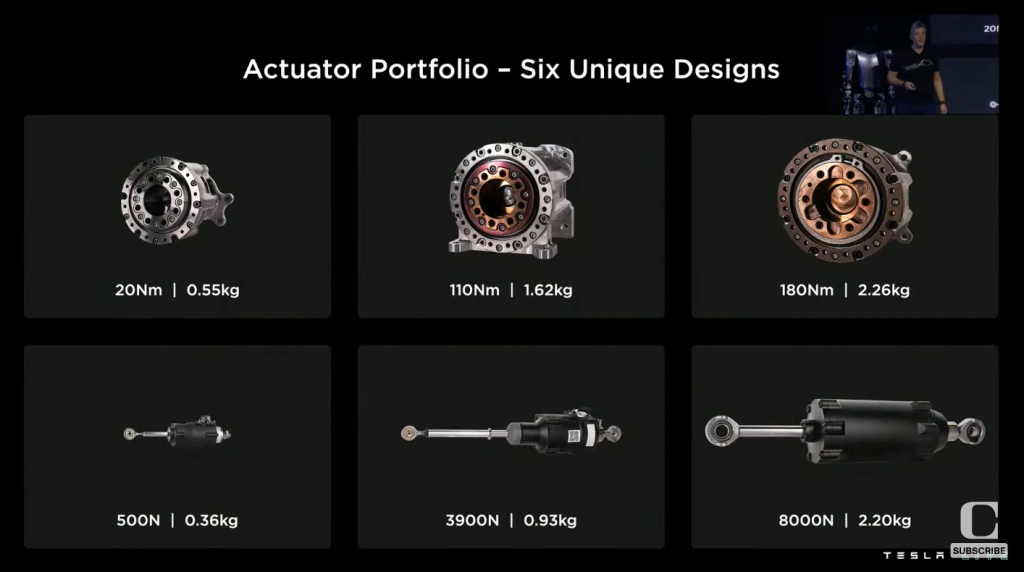
为了能让机器人具有更轻的体重和一定的负载作业能力,运动执行器需要具有很高的扭矩密度和推力密度,这是机器人领域典型的“以小制大”技术难关。在发布会现场特斯拉通过用单个线性执行器拉起一架半吨的钢琴,以此来展示特斯拉机器人腿部执行器的强大拉力。

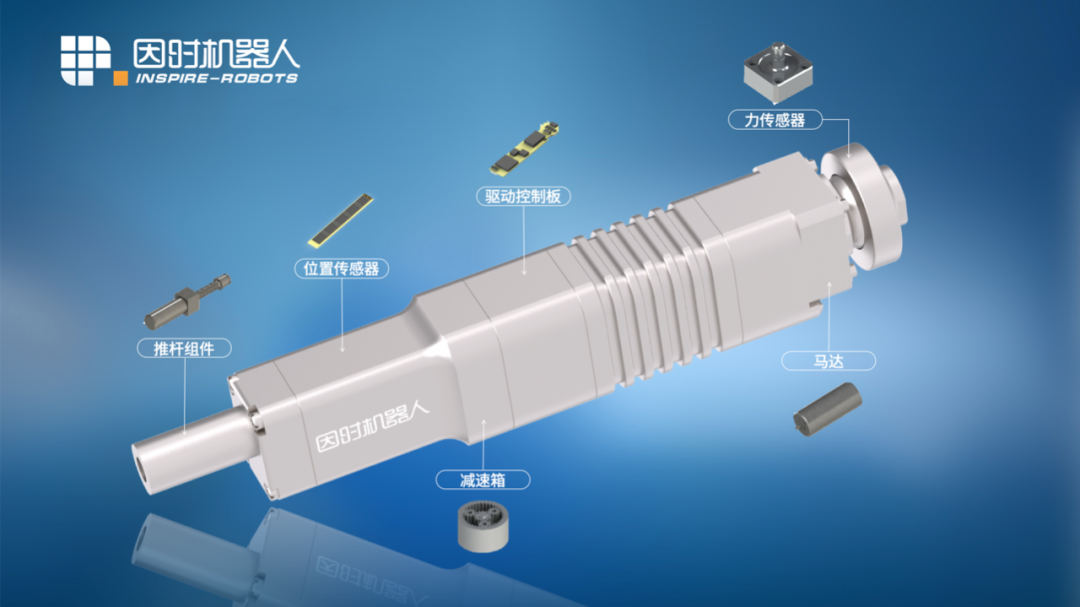
特斯拉人形机器人关节中所使用的线性执行器也叫伺服电缸,是一种集成了伺服电机、减速器、丝杠、传感器和驱动器的一体化运动单元,具有精度高和负载大的技术特点,可以实现精准的速度控制、位置控制和力控制,是机器人的核心运动部件。伺服电缸取代液压和气动的趋势已久,尤其是在工业领域进展很大。随着社会对人形机器人的期望越来越高,伺服电缸向微型化和小型化的发展趋势也更加迫切,特别是尺寸很小重量很轻但精度、力量要求又很高的产品,由此因时机器人的微型伺服电缸应运而生,并在诸多应用场景中得到验证。
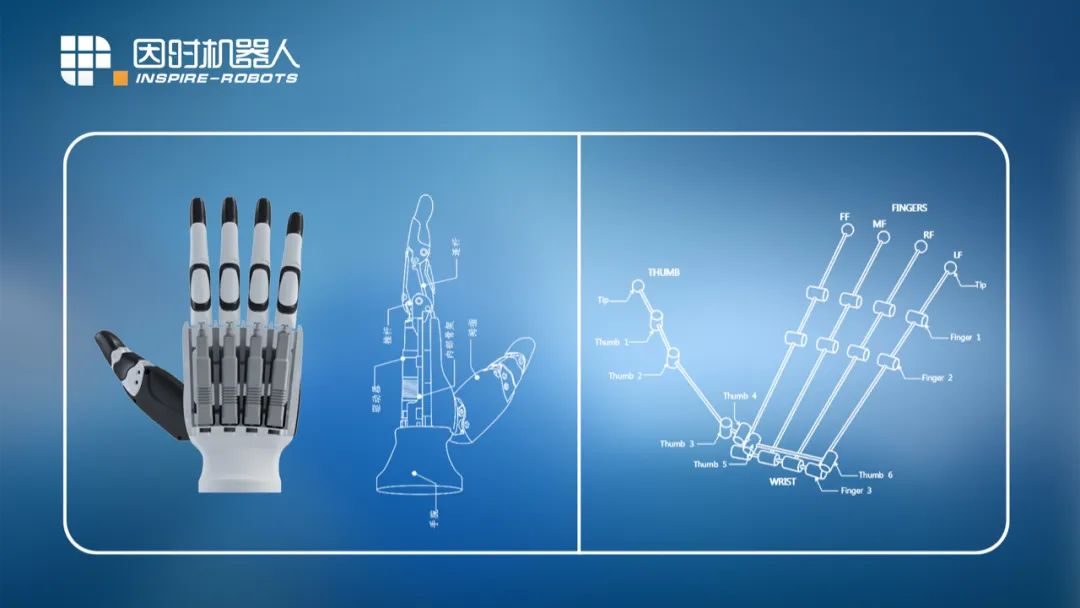
比如在灵巧手中,为了让灵巧手在外形尺寸与灵活性方面具有更好的仿生性,整只手的驱动方式主要就靠6个微型伺服电缸来实现。
人形机器人Optimum的腿部关节运动也是一样的驱动原理,这与传统电伺服机器人差异较大,传统谐波减速旋转伺服在追求高动态响应时需要降低减速比提升传动机构透明度,因此高性能带来的是高耗能。而线性执行的特点是传动透明度低,但等效减速比很大,能够实现大推力。同时当螺杆传动机构设计合理时还具有自锁特性,即提升重物时只要不运动几乎不耗能。而传动透明度低的问题可以通过集成力传感器检测负载的方式进行弥补。这种方案因时机器人通过力控系列微型伺服电缸进行了应用验证,完全能够实现精确力控。

在微型伺服电缸的推重比方面,特斯拉人形机器人线性关节采用的通用伺服推重比从1400N/Kg~4200N/Kg,达到了业内较高的水准。其中自重较小的一款0.36公斤级别的驱动器可能受限于尺寸及集成化的难度,导致推重比较低为1400N/Kg,仍有提升空间。而因时机器人的自重0.1Kg级别的微型伺服电缸推重比已达到4900N/Kg。

因时机器人的微型伺服电缸得益于尺寸小,精度高,功率密度大的优势,在其他领域中也有广泛的应用空间。
在生物医疗领域:
微型伺服电缸应用于微针设备,能有效减小设备尺寸和重量,精准控制刺入深度,提升针刺速度,从而大幅提升用户体验。
微型伺服电缸应用于电子注射器,可以对给药过程进行精准控制,提高安全性并能有效减小仪器尺寸,提升设备便携性。
微型伺服电缸应用于移液器,得益于体积小精度高的优势,可通过电缸矩阵式联动配合,实现多通道吸夜与分液过程的各自计量与控制。

微型伺服电缸应用于微创手术器械,可以减小设备尺寸,实现精准的力控制和位置控制,并具备数据反馈功能,有效降低手术操作难度和风险。
自动化领域:
微型伺服电缸应用于3C自动化和半导体等行业的精密装配生产线上,可以对工件进行精确定位和力控压装,提升良品率和生产效率。
微型伺服电缸应用于PCB压贴焊接,可以实现对元器件的精准力控压贴,过程稳定可靠,可大幅提升良品率。
微型伺服电缸应用于恒力打磨设备,能够实现对工件表面持续施加恒定压力,保证打磨精度和效率。
因时机器人多年来坚持自主研发,不断突破、创新各项关键技术,并在不同行业场景中打磨产品,形成了包括微型伺服电缸和机器人末端执行器在内的丰富产品矩阵,矢志追求更微小更精密的运动控制产品,致力于为机器人、生物医疗及工业自动化等行业提供高性能核心运动部件,为实现中国智造而不懈奋斗!
审核编辑 :李倩
-
pcb
+关注
关注
4319文章
23102浏览量
398019 -
机器人
+关注
关注
211文章
28437浏览量
207166 -
伺服
+关注
关注
16文章
651浏览量
40970
原文标题:微型伺服电缸成为人形机器人核心运动部件
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
人形机器人“造车”,车企扎堆布局!

Atlas转型电驱,纯电+AI正在加速通用人形机器人落地

家电企业纷纷跨界机器人领域,人形机器人成为关注焦点
人形机器人关节的磁编码器理想选择——AS5048 产品介绍
人形机器人核心零部件梳理之行星滚柱丝杠

为何要做人形机器人?
华为云在人形机器人领域展开合作
人形机器人成为车圈“新宠”?







 工商网监
工商网监
评论