 GD32F303固件库开发(13)----定时器TIM捕获PWM测量频率与占空比
GD32F303固件库开发(13)----定时器TIM捕获PWM测量频率与占空比
概述
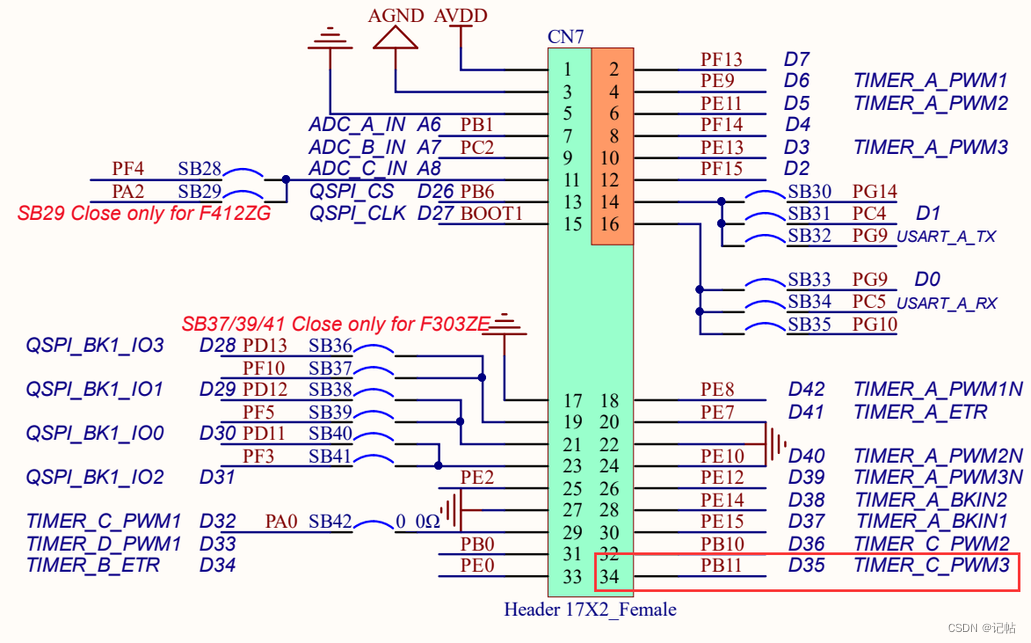
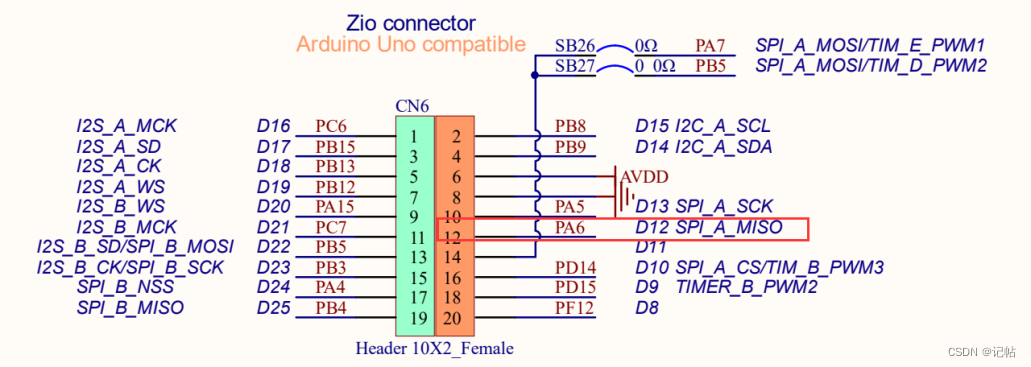
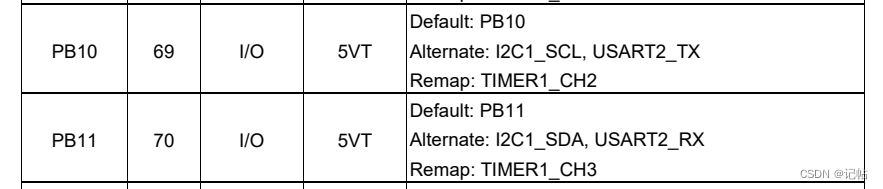
本章配置GD32F303输出PWM,同时使用TIM测量PWM频率和正占空比。 查阅手册可以得知,PB11为定时器1的通道3,让其输出PWM,PA6为定时器2的通道0,让作为TIM定时器输入。 需要GD样片的可以加群申请:615061293 。


生成例程
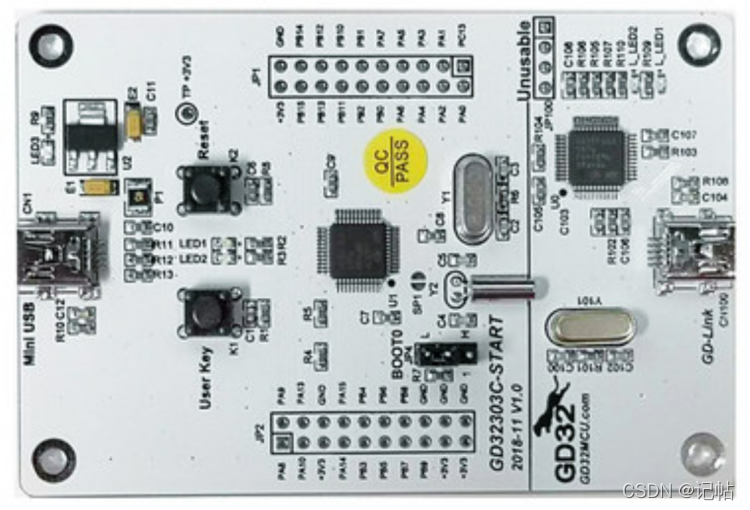
这里准备了自己绘制的开发板进行验证。
管脚图如下所示。
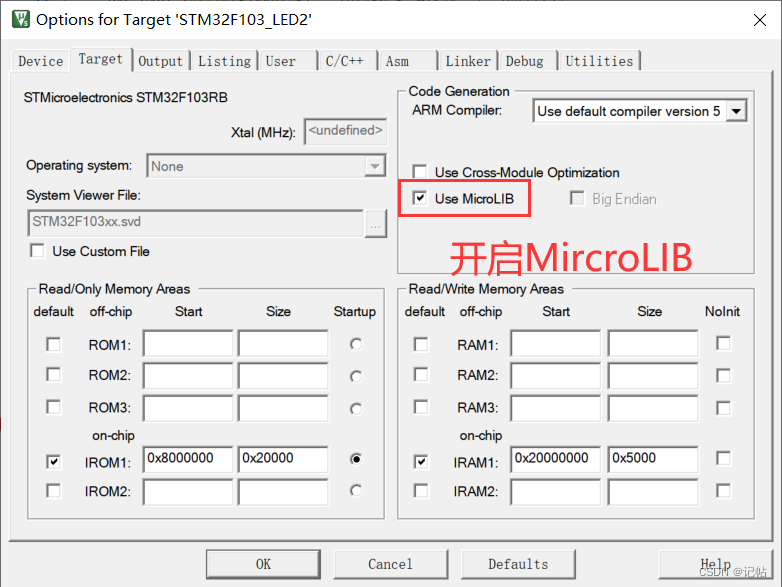
keil配置
microlib 进行了高度优化以使代码变得很小。 它的功能比缺省 C 库少,并且根本不具备某些 ISO C 特性。 某些库函数的运行速度也比较慢,如果要使用printf(),必须开启。
使能串口
/* 使能GPI0A,用PA9、PA10为串口 */
rcu_periph_clock_enable(RCU_GPIOA);
/*使能串口0的时钟 */
rcu_periph_clock_enable(RCU_USART0);
/*配置USARTx_Tx(PA9)为复用推挽输出*/
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9);
/*配置USARTx_RxPA9)为浮空输入 */
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_10);
/* USART 配置 */
usart_deinit(USART0);//重置串口0
usart_baudrate_set(USART0, 115200U);//设置串口0的波特率为115200
usart_word_length_set(USART0, USART_WL_8BIT); // 帧数据字长
usart_stop_bit_set(USART0, USART_STB_1BIT); // 停止位1位
usart_parity_config(USART0, USART_PM_NONE); // 无奇偶校验位
usart_receive_config(USART0, USART_RECEIVE_ENABLE);//使能接收器
usart_transmit_config(USART0, USART_TRANSMIT_ENABLE);//使能发送器
usart_enable(USART0);//使能USART
串口重定向
/* retarget the C library printf function to the USART */
int fputc(int ch, FILE *f)
{
usart_data_transmit(USART0, (uint8_t)ch);
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
return ch;
}
串口重定向后就可以使用printf进行打印。
占空比与频率计算
占空比=(t1-t0)/(t2-t0) 频率=(t2-t0)/时钟频率= =(t2-t0)/(120M/(psc+1))
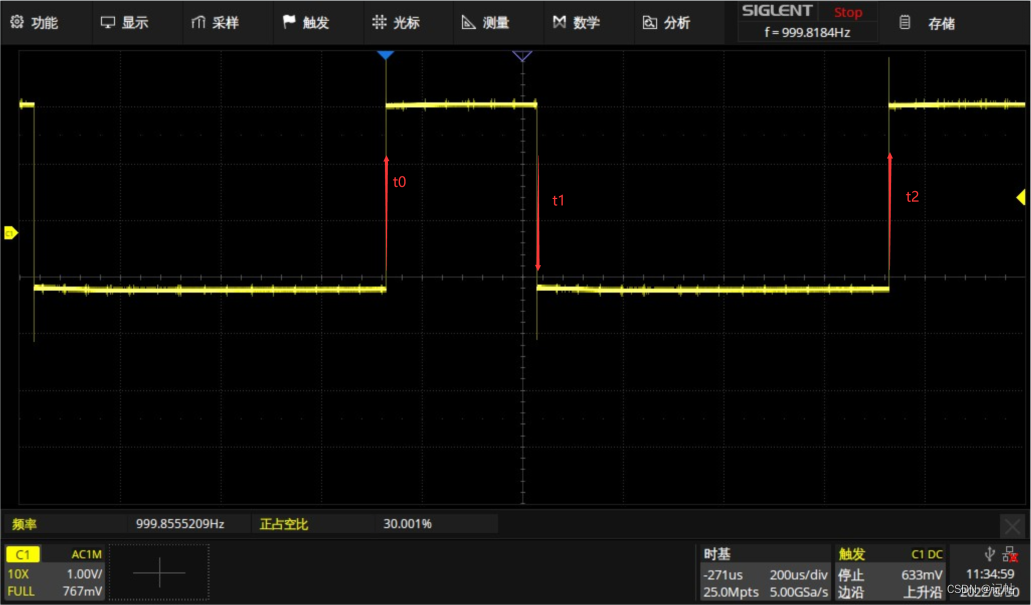
周期需要2个上升沿去判断,设定第一个上升沿time_flag由0->1,下降沿time_dowm_flag由0->1,此时就知道正占空比时间,当在产生上升沿时候,就可以计算出周期使用的时间。

GPIO初始化
/*!
rief configure the GPIO ports
param[in] none
param[out] none
etval none
*/
void gpio_configuration(void)
{
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
/*configure PA6 (TIMER2 CH0) as alternate function*/
gpio_init(GPIOA,GPIO_MODE_IN_FLOATING,GPIO_OSPEED_50MHZ,GPIO_PIN_6);
//TIMER1-CH3
gpio_pin_remap_config(GPIO_TIMER1_PARTIAL_REMAP1, ENABLE);
gpio_init(GPIOB,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_11);
}
开启中断
/*!
rief configure the nested vectored interrupt controller
param[in] none
param[out] none
etval none
*/
void nvic_configuration(void)
{
nvic_priority_group_set(NVIC_PRIGROUP_PRE1_SUB3);
nvic_irq_enable(TIMER2_IRQn, 1, 1);
}
TIM1输出PWM初始化
PWM频率计算如下所示。

void timer1_config(void)
{
/* -----------------------------------------------------------------------
TIMER1 configuration: generate 3 PWM signals with 3 different duty cycles:
TIMER1CLK = SystemCoreClock / 120 = 1MHz
TIMER1 channel0 duty cycle = (4000/ 16000)* 100 = 25%
TIMER1 channel1 duty cycle = (8000/ 16000)* 100 = 50%
TIMER1 channel2 duty cycle = (12000/ 16000)* 100 = 75%
----------------------------------------------------------------------- */
timer_oc_parameter_struct timer_ocintpara;
timer_parameter_struct timer_initpara;
rcu_periph_clock_enable(RCU_TIMER1);
timer_deinit(TIMER1);
/* TIMER1 configuration */
timer_initpara.prescaler = 119;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 1000;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER1,&timer_initpara);
/* CH0,CH1 and CH2 configuration in PWM mode */
timer_ocintpara.outputstate = TIMER_CCX_ENABLE;
timer_ocintpara.outputnstate = TIMER_CCXN_DISABLE;
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;
timer_ocintpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;
timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW;
timer_ocintpara.ocnidlestate = TIMER_OCN_IDLE_STATE_LOW;
timer_channel_output_config(TIMER1,TIMER_CH_3,&timer_ocintpara);
/* CH3 configuration in PWM mode0,duty cycle 50% */
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_3,500);
timer_channel_output_mode_config(TIMER1,TIMER_CH_3,TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER1,TIMER_CH_3,TIMER_OC_SHADOW_DISABLE);
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(TIMER1);
/* auto-reload preload enable */
timer_enable(TIMER1);
}
TIM2输入捕获设置
void timer2_config(void)
{
/* TIMER2 configuration: input capture mode -------------------
the external signal is connected to TIMER2 CH0 pin (PB4)
the rising edge is used as active edge
the TIMER2 CH0CV is used to compute the frequency value
------------------------------------------------------------ */
timer_ic_parameter_struct timer_icinitpara;
timer_parameter_struct timer_initpara;
//开启定时器时钟
rcu_periph_clock_enable(RCU_TIMER2);
timer_deinit(TIMER2);
/* TIMER2 configuration */
timer_initpara.prescaler = 120-1;//定时器的时钟频率是120MHz,预分频120-1
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;//对齐模式
timer_initpara.counterdirection = TIMER_COUNTER_UP;//向上计数
timer_initpara.period = 65535;//重载值
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;//不分频
timer_initpara.repetitioncounter = 0;//重复计数
timer_init(TIMER2,&timer_initpara);
/* TIMER2 configuration */
/* TIMER2 CH0 input capture configuration */
timer_icinitpara.icpolarity = TIMER_IC_POLARITY_RISING;//捕获极性,上升沿捕获
timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI;//通道输入模式选择
timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1;//分频
timer_icinitpara.icfilter = 0x0;//滤波
timer_input_capture_config(TIMER2,TIMER_CH_0,&timer_icinitpara);
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(TIMER2);//自动重载使能
/* clear channel 0 interrupt bit */
timer_interrupt_flag_clear(TIMER2,TIMER_INT_FLAG_CH0);//CH0 通道中断清除
/* channel 0 interrupt enable */
timer_interrupt_enable(TIMER2,TIMER_INT_CH0);//CH0 通道中断使能
/* TIMER2 counter enable */
timer_enable(TIMER2);
}
中断
#define IR_IN1 gpio_input_bit_get (GPIOA, GPIO_PIN_6)
uint8_t time_up_flag=0;//上升沿标志位
uint8_t time_dowm_flag=0;//下降沿标志位
uint32_t time_up_num=0;//上升沿计数
uint32_t time_dowm_num=0;//下降沿计数
float time_frequency;//频率
float time_duty;//占空比
void TIMER2_IRQHandler(void)
{
timer_ic_parameter_struct timer_icinitpara;
timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI;
timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1;
timer_icinitpara.icfilter = 0x0;
if(SET == timer_interrupt_flag_get(TIMER2,TIMER_INT_FLAG_CH0)){
/* clear channel 0 interrupt bit */
timer_interrupt_flag_clear(TIMER2,TIMER_INT_FLAG_CH0);
if(IR_IN1&&time_up_flag==0)//第一次上升
{
time_up_flag=1;
timer_icinitpara.icpolarity = TIMER_IC_POLARITY_FALLING; //设置为下降沿
timer_input_capture_config(TIMER2,TIMER_CH_0,&timer_icinitpara);
timer_counter_value_config(TIMER2 , 0); // 计数清零,从头开始计
}
else if(IR_IN1==0&&time_dowm_flag==0)//下降
{
time_dowm_num = timer_channel_capture_value_register_read(TIMER2,TIMER_CH_0)+1; // 读取捕获计数,这个时间即为上升沿持续的时间
timer_icinitpara.icpolarity = TIMER_IC_POLARITY_RISING; //设置为上升沿
timer_input_capture_config(TIMER2,TIMER_CH_0,&timer_icinitpara);
time_dowm_flag=1;
}
else if(IR_IN1&&time_dowm_flag==1)//第二次之后上升
{
time_up_num = timer_channel_capture_value_register_read(TIMER2,TIMER_CH_0)+1;; // 读取捕获计数,这个时间即为上升沿持续的时间
timer_icinitpara.icpolarity = TIMER_IC_POLARITY_FALLING; //设置为下降沿
timer_input_capture_config(TIMER2,TIMER_CH_0,&timer_icinitpara);
time_dowm_flag=0;
timer_counter_value_config(TIMER2 , 0); // 计数清零,从头开始计
}
}
初始化
gpio_configuration();
nvic_configuration();
timer1_config();
timer2_config();
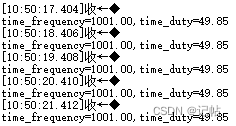
主程序
while (1)
{
time_frequency=1000000/time_up_num;//频率
time_duty = (float)time_dowm_num/(float)time_up_num;//占空比
printf("
time_frequency=%.2f,time_duty=%.2f",time_frequency,time_duty*100) ;
delay_1ms(1000);
}
测试结果
当输出1k频率,50%正占空比。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PWM
+关注
关注
114文章
5191浏览量
214146 -
定时器
+关注
关注
23文章
3251浏览量
114939 -
Tim
+关注
关注
0文章
81浏览量
17910 -
固件库
+关注
关注
2文章
97浏览量
14954 -
gd32f303
+关注
关注
4文章
38浏览量
3694
发布评论请先 登录
相关推荐
【GD32F303】星空派介绍
GD32官方资料的基础上,提供GD32F303的库函数开发资料、例程讲解、视频课程等。同时还提供RT-Thread相关的驱动开发、应用开发、
发表于 09-11 17:55
gd32f303外部晶振使用25M,会对rt thread中的定时器精度造成影响吗?
大家好因为项目需要gd32f303外部晶振使用25M,不知道会不会对rt thread中的定时器精度造成影响?如果造成影响应该如何解决?大家好,咨询个问题,因为功能需要gd32f303芯片外部晶振
发表于 06-14 09:40
GD32F303固件库开发(3)----使用固件库点亮LED
概述 在GD的官网中有许多的DEMO文件,可以使用开发板的案例或者对应的MCU标准固件库。需要样片的可以加群申请:6_15061293。 下图是GD

GD32F303固件库开发(5)----GPIO输出模式,速率测试、开漏和输出说明
以STM32CUBEMX创建STM32F103工程,同时移植在GD32F303中,同时通过GD32303C_START开发板内进行验证。
STM32CUBEMX开发GD32F303(12)----输出PWM及修改PWM频率与占空比
本章STM32CUBEMX配置STM32F103,并且在GD32F303中进行开发,同时通过开发板内进行验证。 本章主要配置定时器输出

GD32F303固件库开发(12)----输出PWM及修改PWM频率与占空比
本章STM32CUBEMX配置STM32F103,并且在GD32F303中进行开发,同时通过开发板内进行验证。 本章主要配置定时器输出
STM32CUBEMX开发GD32F303(13)----定时器TIM捕获PWM测量频率与占空比
概述 本章STM32CUBEMX配置STM32F103,并且在GD32F303中进行开发,同时通过开发板内进行验证。 本章STM32CUBEMX配置STM32

GD32F303固件库开发
的可以加群申请:615061293 。 GD32F303固件库开发(1)----前期准备与烧录 使用GDLINK、jlink、串口下载程序到GD
【GD32 MCU 移植教程】2、从 GD32F303 移植到 GD32F503
GD32E503 系列是 GD 推出的 Cortex_M33 系列产品,该系列资源上与 GD32F303 兼容度非常高,本应用笔记旨在帮助您快速将应用程序从 GD32F303 系列微控





 工商网监
工商网监
评论