 车路协同系统在智慧交通中的应用场景
车路协同系统在智慧交通中的应用场景
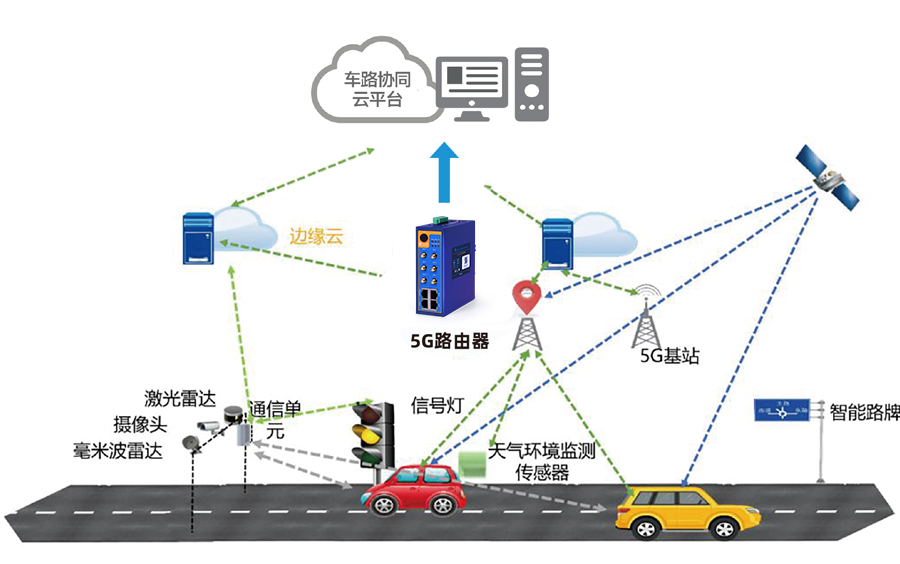
车路协同,即利用5G等车载网络传感器与高精度地图的紧密配合获知路况,全方位实时车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成安全、高效和环保的道路交通系统,车路协同已经成为智慧交通规划中的重要组成部分。
与传统的单车端系统或者单路侧系统相比,车路协同系统更加侧重路端、云端与车辆的交互,是囊括车端感应、路端感应、通信技术与云控技术的整体解决方案。车路协同主要包括四大关键技术:智能车载技术、智能路侧技术、通信技术、云控技术。智能车载指安装在车辆终端,是拓宽驾驶员视野、增加驾驶员对行车环境和车辆运行状态的感知、加强行车安全的单元;智能路侧即采集道路状况、交通状况,通过通讯网络将信息传递至指挥中心或路侧处理单元处理,通过网络传递至有信息请求的车载端;通信技术指车载端与路侧端之间的通信,用于车与路信息采集、路况信息采集,以及车与车之间的通信中继;云控技术即具备数据存储、计算、决策的云端技术。要全面实现车路协同,人工智能技术在其中发挥关键作用。通过车路云图全面打通车路协同,如下图中所示,人工智能技术在车路协同中的应用场景及飞桨在车路协同3D感知中的应用效果。
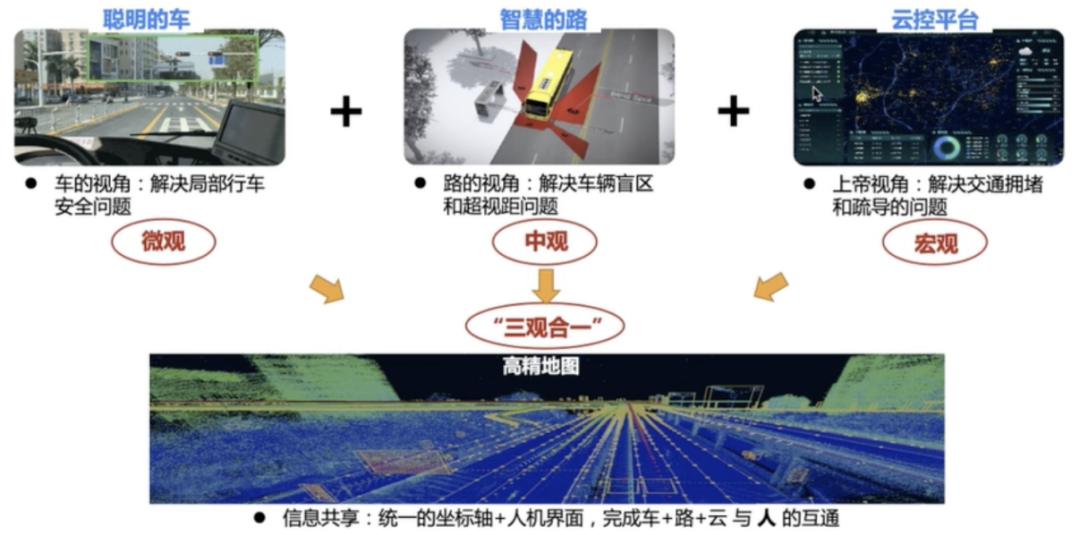
图2:车路云图四维一体全面打通车路协同
车路协同一些典型应用场景及效果如下图所示:

图3:车路协同典型应用场景
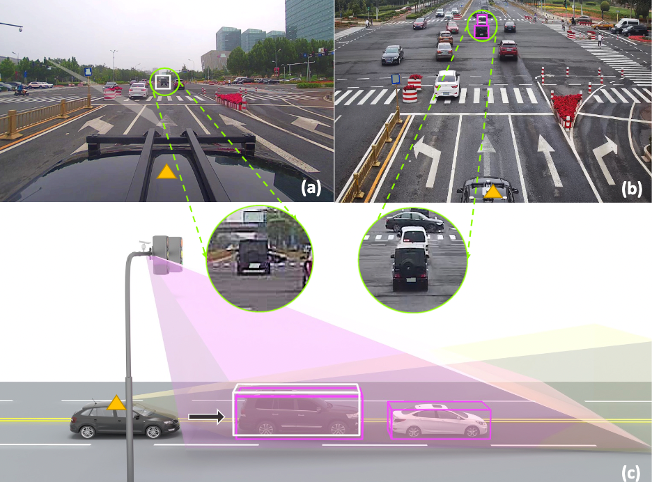
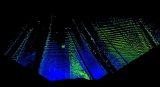
图4:北京亦庄车路协同3D感知
在车路协同领域,百度率先提出车路协同方案,是车路协同方案的坚定探索者和推动者。在2018年年底正式开源Apollo车路协同技术方案,向业界开放车路协同领域的技术和服务。通过在平台化、生态化、商业化等各个领域深耕实践,经历4年发展历程,百度积累了涵盖车、路、云、图一体化的解决方案。百度始终保持对于技术和方案全面开放的态度以及对行业的生态促进的理念,在百度飞桨深度学习开源开放平台上开源开放了众多技术能力,从而支持企业车路协同场景的开发和构建,主旨在于帮助企业建设多元化和规范化的智能道路基础设施,降低开发者开发成本,丰富车路协同产业生态,为行业的健康发展贡献百度力量。如下图所示,飞桨全面支持车路协同场景构建全景和基于飞桨的百度Apollo车路协同开放平台及长沙高新区智慧交通车路协同应用展示。

图5:百度飞桨全面支持车路协同场景构建

图6:基于飞桨的百度Apollo车路协同开放平台

图7:长沙高新区智慧交通-车路协同赋能智能信控
场景应用
场景一
视觉3D道路障碍物检测
3D道路障碍物检测旨在定位出车辆及道路障碍物在三维空间中的位置、大小和方向,并识别出物体的类别属性。作为车路协同和自动驾驶感知系统中的重要模块,3D障碍物检测任务存在设计复杂、开发繁琐、精度和速度要求高等痛点和难点问题。飞桨与Apollo联合打造的Paddle3D深度学习3D感知套件聚合图像的单目、BEV检测模型、基于点云的稀疏三维卷积等多种前沿和特色三维目标检测模型,灵活设计开发框架,涵盖精度调优策略、极致优化模型的性能,助力开发者便捷地完成障碍物检测从训练到部署的全流程应用。
场景二
车牌识别
车牌识别广泛应用于车辆出入场识别和车路协同车辆识别等场景中,在实际的使用过程中,存在图像质量参差不齐、角度倾斜、光照不足、车牌在图像中尺寸差异大和使用设备算力有限等问题和难点。针对上述难点问题,通过使用飞桨PaddleOCR开发套件提供的自研PP系列模型PP-OCRv3,结合飞桨深度学习模型压缩工具库PaddleSlim完成车牌识别模型的训练和量化,在CCPD新能源数据集达到99%的检测精度和94%的识别精度,模型大小为12.8M(检测2.5M+识别10.3M),量化后模型体积进一步压缩到5.8M(检测1M+识别4.8M),推理速度提升25%。
场景三众包建图方案保持地图高鲜度
众包建图旨在利用大规模的量产车辆对高精地图进行更新,实现低成本高效的地图更新工作。众包建图对于环境的感知通常采用全景分割来实现。在实际业务中,依赖人工来完成全景分割模型训练所需数据标注,时间及标注成本高昂。针对以上问题,采用飞桨PaddleSeg交互式分割技术,通过少量交互信息便能高效完成复杂道路场景分割标注,有效降低标注成本,提升标注精度,极大加速全景分割模型训练并提升最终模型效果。
审核编辑:郭婷
-
传感器
+关注
关注
2551文章
51084浏览量
753440 -
智慧交通
+关注
关注
5文章
706浏览量
26924
原文标题:AI赋能智能交通“车路协同”场景,实现“聪明的车、智慧的路”!
文章出处:【微信号:CVSCHOOL,微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

系统放大器的技术原理和应用场景

强强联手!东揽智能与图为科技携手开启智慧交通新纪元
智慧交通:关键技术及应用场景
雷森受邀参与新一代“车路云未来交通”技术沙龙活动
智慧交通:实现智能交通管理的新方向
车路云协同,这次它真的来了吗?

北醒激光雷达助力京沪“1号高速”智慧化升级
四维图新张建平:紧抓车路云一体化发展机遇,推动更多应用场景落地

助力车路协同,基于i.MX8MPlus核心板的路侧单元主控方案

NanoEdge AI的技术原理、应用场景及优势
金溢科技业绩大幅增长,车路协同业务优化贡献显著





 工商网监
工商网监
评论