 关于交通扰动及感知扰动的SOTIF性能验证
关于交通扰动及感知扰动的SOTIF性能验证

01、整体测试方案
基于关键场景的预期功能安全测试评价,需要综合各类技术手段,在有限的测试中证明被测系统风险满足接受准则,并进一步说明被测系统预期功能安全(SOTIF)性能水平。关键场景由基础场景和触发条件构成,工作组根据专家经验分析与系统过程理论分析得到了预期功能安全触发条件列表,并通过多维测试的手段对被测车辆进行评估,从而以分级的方式对测试车辆进行SOTIF能力验证,其中分级验证模块中基础红色区域代表支撑准入认证区域。本年度预期功能安全工作组以HWP功能为例,探索支撑自动驾驶功能认证的预期功能安全测试评价方案,并于本次试验验证其中关于交通扰动及感知扰动的SOTIF性能。
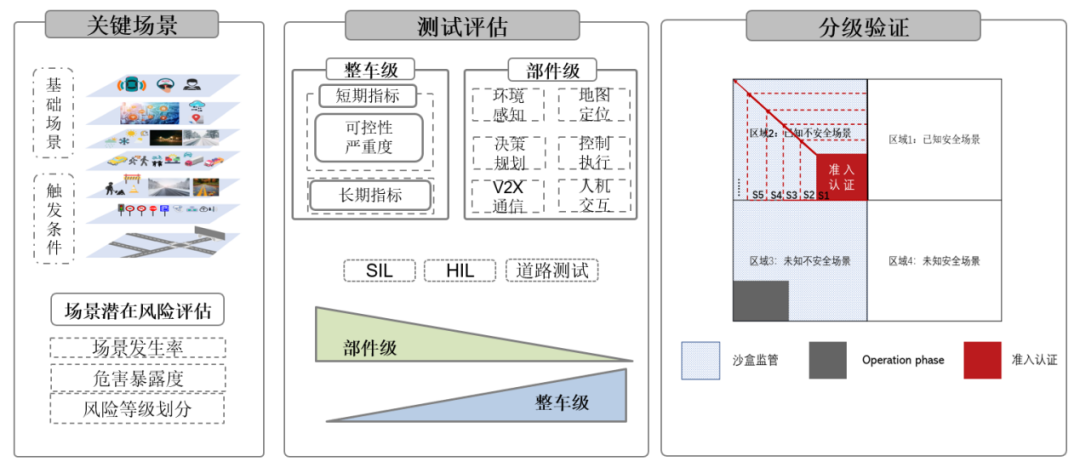
图1 基于关键场景的SOTIF测试整体方案
02
HWP SOTIF测试用例
基于中国优秀谨慎驾驶员模型以及环境感知系统触发条件,设计HWP功能的SOTIF测试用例。试验分为Cut-in、Cut-out、Deceleration三大类场景,主要关注他车横向切入速度、纵向相对距离等参数,分别在人类驾驶员发生碰撞的边界工况中选取了本次试验的测试用例。并在此基础上叠加了环境感知系统触发条件如降雨、降雾、低光照等,构成了环境感知系统测试用例。试验车速为20km/h~80km/h,下图为测试用例选取示意图。

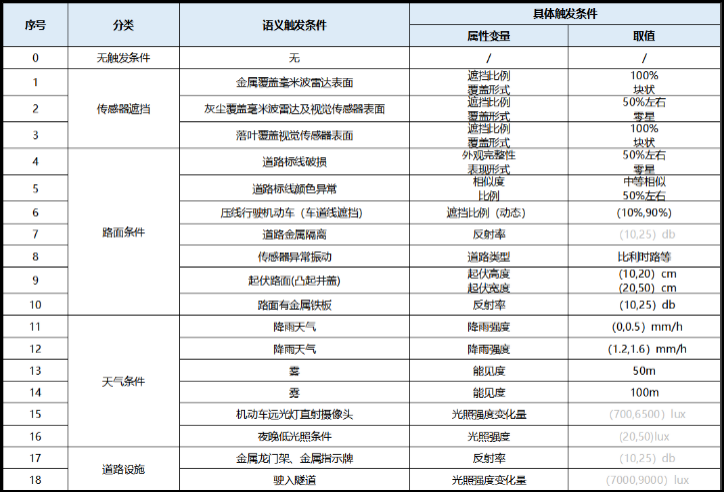
图2 测试用例选取示意图
03
测试团队与仪器设备
本次试验的测试场地为国家智能网联汽车(长沙)测试区内的模拟高速公路、雨雾模拟区等,该场地最大限度的还原了高速场景及特殊环境的测试工况,保障了试验结果的真实有效性。测试区主要分为五大功能分区——城市测试区、高速测试区、乡村测试区、越野测试区和集群测试区。本次试验测试团队由中汽院(湖南)公司、清华大学、同济大学、中国一汽、吉林大学等多家单位人员共同组成,专项负责整体测试实施工作。
本次被测车辆为中国一汽提供的具备HWP功能的红旗EHS9车型,如图3所示。自动驾驶平台系统及高精度定位设备等测试设备在本次试验中发挥重要作用,如图4所示。
04、交通扰动测试
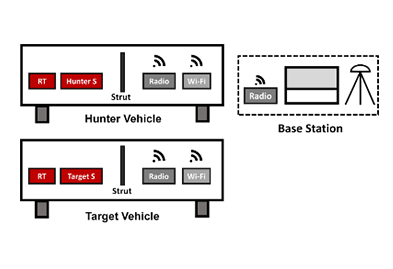
为验证交通扰动下车辆的预期功能安全性能,测试团队搭建了自动驾驶平台车并根据试验工况设计自动驾驶平台车运动轨迹,其中包括Cut-in、Cut-out、Deceleration三大类场景,并对不同车辆参数(横向切入速度、相对纵向距离等)下的工况进行了测试,最终对测试结果进行了分析对比,得到了预期的测试结果。
Cut-in场景表现为自车直行,他车从旁边车道以相对距离为触发并以一定的横向速度切入自车车道,试验记录了各个车辆数据信息,并分析了测试结果。
Cut-out场景表现为自车直行,前车以前前车的距离为触发并以一定的横向速度切出自车车道,试验记录了各个车辆数据,并分析了测试结果。
Deceleration场景表现为自车直行,前车以一定的减速度和相对距离为触发开始急刹,试验记录了各个车辆数据,并分析了测试结果。
05、感知扰动测试
测试团队在上述实验的基础之上叠加环境感知系统触发条件,以测试车辆在不同触发条件作用下的预期功能安全性能。实验根据场地条件,进行了包括传感器遮挡、路面条件、天气条件以及道路设施四个大类共计18个小类触发条件的实验。
其中,传感器遮挡通过使用落叶、金属物、灰尘等对摄像头或毫米波雷达进行遮挡实现;天气条件包括对摄像头或毫米波雷达感知造成影响的雨天、雾天及光照条件等触发条件;路面条件包括不同属性路面材质和不同特征车道标线等触发条件;道路设施条件包括了引起毫米波反射和信号屏蔽的波形金属护栏、龙门架及隧道路段。
06、实验数据采集
本次试验采集了车载摄像头视频、实车真值数据、感知数据、无人机航测数据以及车内人员fNIRS近红外血氧数据。其中实车真值数据包括测试中全部车辆的位置、速度、航向角等物理参数信息,可用于计算测试评价指标并验证车辆的预期功能安全;感知数据包括系统识别到的物体信息、车道线信息等,可用于分析自动驾驶系统的感知能力;无人机航测数据为俯视视角下车辆的数据信息,可补充到测试指标的计算;fNIRS近红外血氧数据可以反映人类大脑活动时氧合血红蛋白和脱氧血红蛋白的变化情况,可用于分析车内乘员对不同危险工况的反应特征。丰富多样的数据信息对于自动驾驶的预期功能安全研究具有宝贵的科研价值。
审核编辑:郭婷
-
感知系统
+关注
关注
1文章
88浏览量
16463 -
自动驾驶
+关注
关注
794文章
14976浏览量
181355
原文标题:支撑自动驾驶功能认证的预期功能安全实车测试方法实践
文章出处:【微信号:谈思实验室,微信公众号:谈思实验室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
预期功能安全是什么?(下)
预期功能安全是什么?(上)
慧尔视荣获2025年度交通感知优秀产品奖
直流固态变压器控制策略仿真解决方案
SGS授予智驾科技自动驾驶SOTIF预期功能安全流程认证证书

无线倾角传感器在房屋监测中的应用:破解邻近施工扰动监测难题

主动防御电源扰动!天硕(TOPSSD)M.2 NVMe 工业级SSD如何应对电网异常守护数据安全
从流程到落地:SOTIF与开发、数据的深度融合实践

索尼FCB-EV9500M:赋能智能交通,构建全场景视觉感知体系
SASEInsght · SOTIF专栏 | 智驾感知总“掉链子”?这个标准教你系统识别 “潜在触发条件”
DS4-PPB级异味传感器精准感知,洞察无形气味风险
基于扰动观测器的云台驱动控制:开启抗干扰与平稳运动新时代
无轴承永磁电机悬浮波动抑制策略
小鹏汽车斩获两项国际顶级安全认证 ISO 26262功能安全流程认证和ISO 21448预期功能安全(SOTIF)流程认证




评论