 一文讲解清楚FX5U PID自动调节控制
一文讲解清楚FX5U PID自动调节控制
一、案例任务控制要求描述
三相异步马达带不同负载时,转速会产生不同的压降。比如说:两级电机的额定转速是3000rpm,但是实际上它并不能达到额定转速,这是因为在运行过程中会收到摩擦力、离心力等影响,就会产生转速压降。由于带了不同的负载,就会产生不同的速度。
现在电机想要恒速保持在1000rpm,如果不加任何负载,1000rpm是没有问题的,但是加上不同负载之后该怎么让电机恒速呢?此时就需要进行闭环控制,闭环控制就需要用到PID技术。利用编码器通过FX5U本身自带的高速脉冲接口,将电机的频率传动给PLC,PLC通过自身内部的PID指令控制驱动变频器提高或降低频率的输出。如图1-1所示。

图 1-1 变频器闭环控制
二、相关基础知识
知识准备:
1.模拟量基本设置(见图2-1)
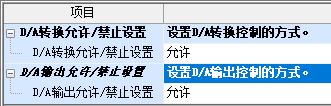
图 2-1 模拟量输出基本设置
(1)D/A转换允许/禁止设置:设置了D/A转换允许才会有模拟量的输出。
(2)D/A输出允许/禁止设置:设置允许输出数字输出值,设置禁止输出偏置值(HOLD设定值)。
2.模拟量应用设置(见图2-2)
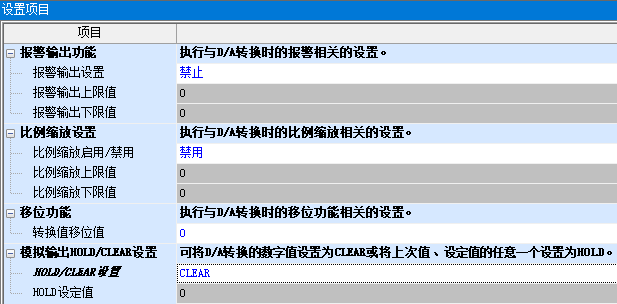
图 2-2 模拟量输出应用设置
(1)报警输出功能:当数字输出值不在报警输出值的范围内,报警输出标志为ON;
(2)比例缩放设置:对要输出的数字值进行换算如图2-3所示。
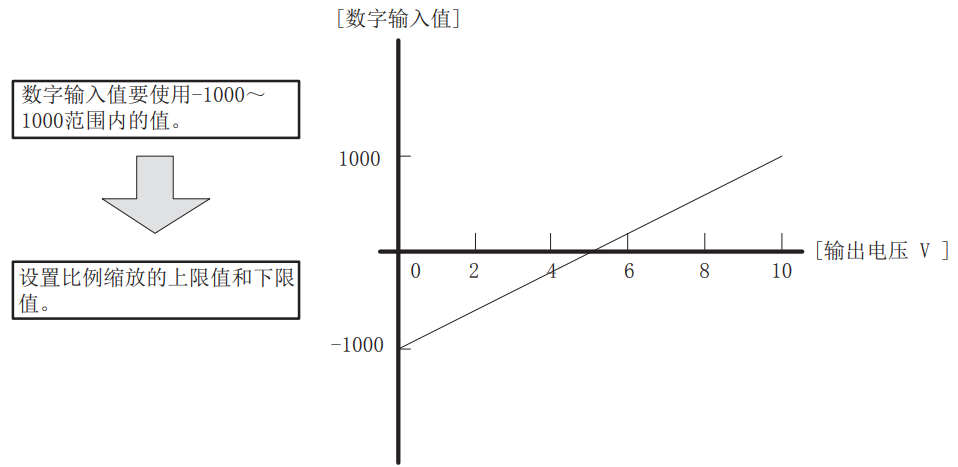
图 2-3 比例缩放设置
比例缩放值的计算方法:输出范围中使用出厂设置。

(3)移位功能:对数字输入值整体移位。
(4)模拟输出HOLD/CLEAR设置:CLEAR:清除数据为0;上次值(保持);设置值。(将D/A转换允许/禁止设置设置为禁止时有效)。
3.高速输入基本设置(见图2-4)
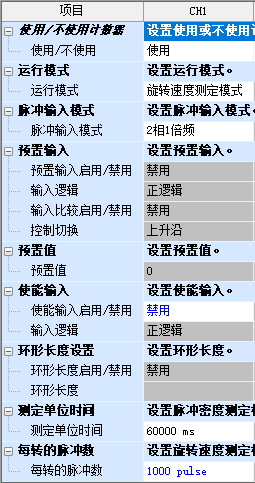
图 2-4 高速输入基本设置
(1)运行模式:普通模式:作为一般的高速计数器使用;脉冲密度测定模式:测定从输入脉冲数开始到指定时间内的脉冲数;转速测定模式:测定从输入脉冲数开始到指定时间内的转速。测定单位时间跟每转的脉冲数根据模式进行单独设置。
(2)脉冲输入模式:1相1输入计数器(S/W)--受扫描周期影响如图2-5所示。
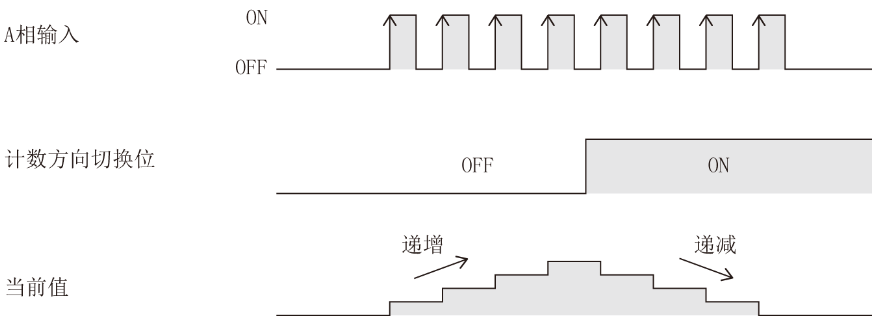
图 2-5 1相1输入计数器(S/W)
1相1输入计数器(H/W)--受硬件输入影响如图2-6所示。
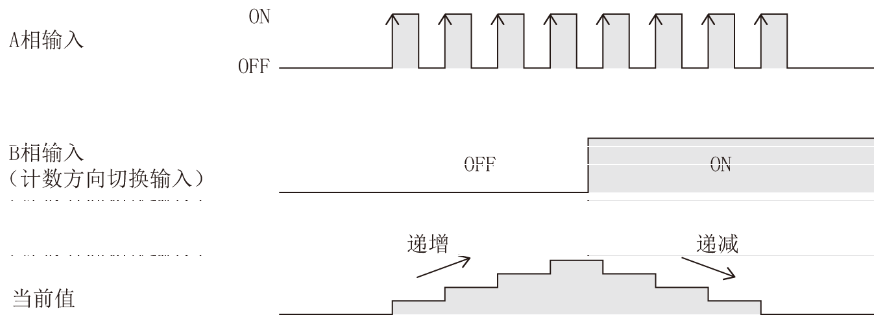
图 2-6 1相1输入计数器(H/W)
1相2输入计数器如图2-7所示。
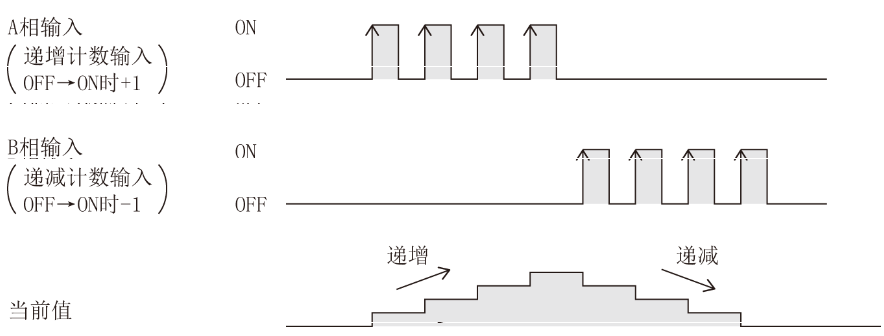
图 2-7 1相2输入计数器
2相2输入计数器[1倍频]如图2-8所示。

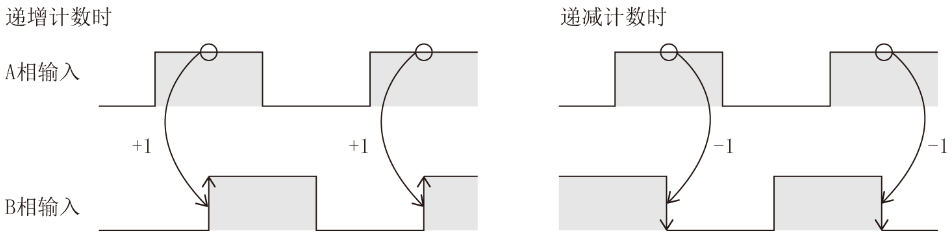
图 2-8 2相2输入计数器[1倍频]
2相2输入计数器[2倍频]如图2-9所示。
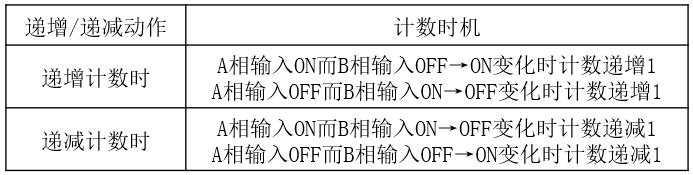
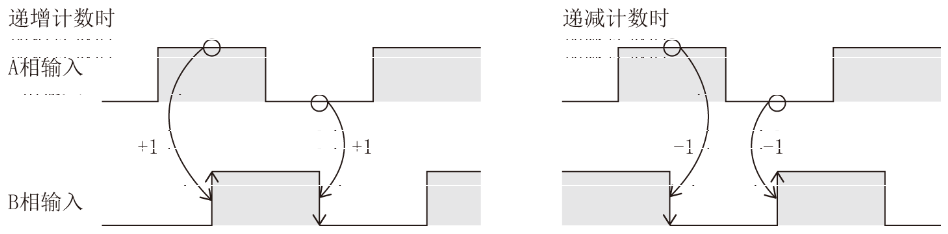
图 2-9 2相2输入计数器[2倍频]
2相2输入计数器[4倍频]如图2-10所示。
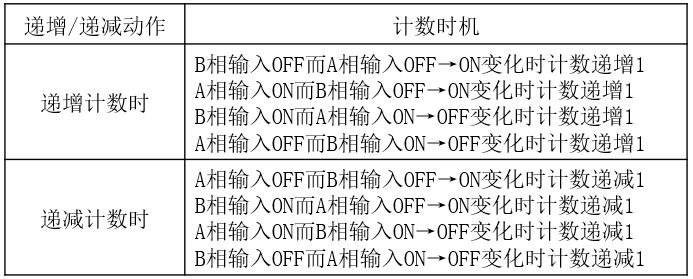
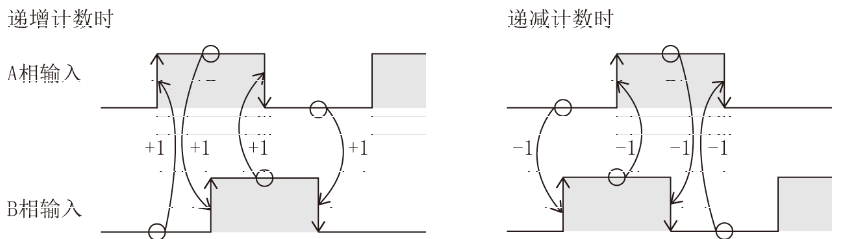
图 2-10 2相2输入计数器[4倍频]
内部时钟如图2-11所示。
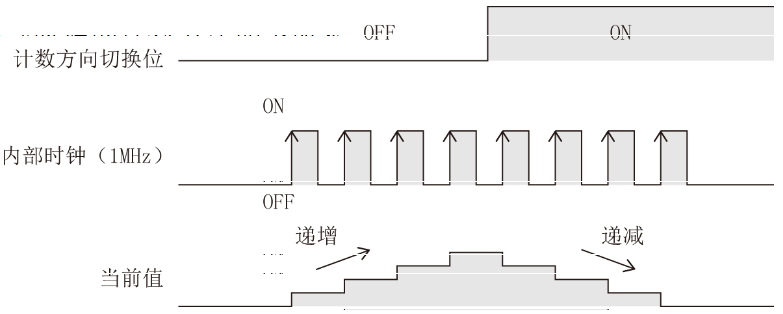
图 2-11 内部时钟
内部时钟始终以1Mhz的时钟进行计数递增/递减。不使用来自外部的输入。
(3)预置功能:通过预设值可以提前设置好对应的值。
(4)使能功能:通过使能按钮才能进行处理高速功能。
(5)环形长度设置:根据环长设置,高速计数器的形式为环形计数器。未设置时如图2-12所示,设置时如图2-13所示。
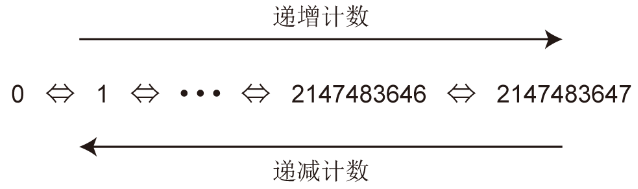
图 2-12 链接长度
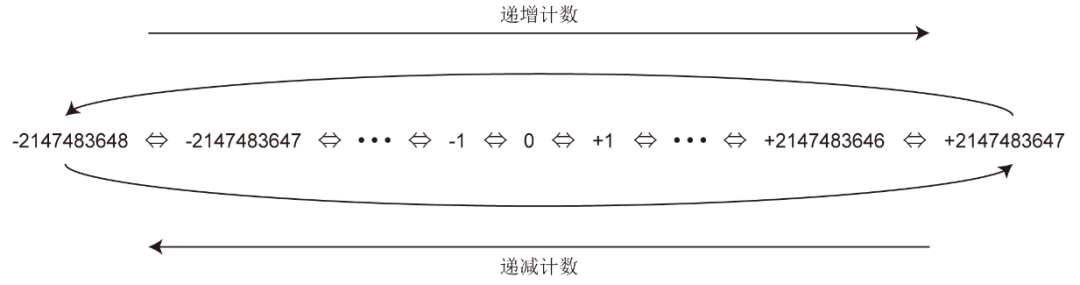
图 2-13 环形长度
三、任务的实施
本案例会从电气元件选型—IO地址分配—硬件接线-软件参数设置-程序设计-PID自动调试这六方面进行讲解。
1、电气元件选型
根据任务控制的描述,在本例中需要一个PLC,一台变频器、一个编码器、一台电动机和两个按钮设备。如下表3-1所示。
| 名称 | 型号 | 数量 | 备注 |
| 三菱PLC | FX5U-32MT/ES | 1 | 自带模拟量输入输出 |
| 按钮 | 2 | 启动与停止使用 | |
| 变频器 | FR-E800 | 1 | 控制电动机 |
| 编码器 | 1 | ||
| 电动机 | 1 |
表3-1 BOM表
2、 I/O地址分配
根据任务控制的描述,在本例中需要使用到2个输入点1个输出点,I/O分配表如下表3-2所示。
| 输入点 | 注释 | 输出点 | 注释 |
| X0 | 启动按钮 | Y0 | 运行 |
| X1 | 停止按钮 |
表3-2 I/O地址分配表
3、硬件接线图
FX5U本体PLC可兼容源性和漏型的输入,当S/S跟24V短接时,输入即为漏型输入如图3-1所示;当S/S跟0V短接时,输入即为源性型输入。在本案例中需要用到两个按钮,一个是启动按钮接在X10上面,一个是停止按钮接在X11上面。由于变频器的正反转的控制是触点控制,所以直接把PLC上的COM0接到变频器输入公共端SD,Y0接变频器上的正转端子STF。
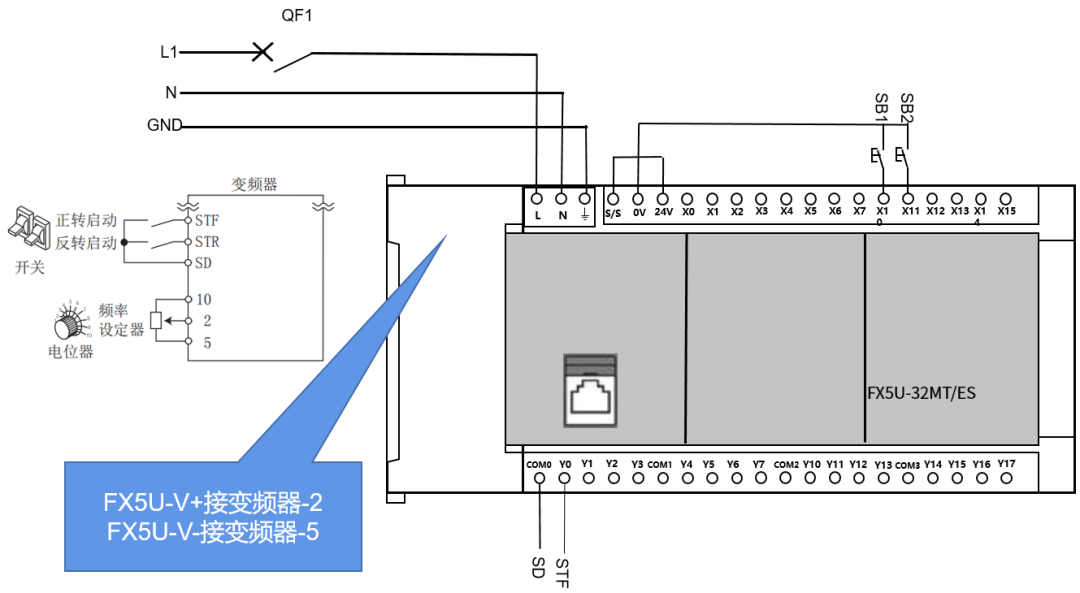
图3-1 PLC与变频器之间的接线
由于变频器模拟量给定频率有两个通道,在此我们使用“2”通道,所以PLC左上方的模拟量的输出V+接到变频器2号端子上,V-接到变频器5号端子上。
给编码器供电后,A相接入X0、B相接入X1;FX5U的S/S接入到24V,说明PLC输入低电平有效,如图3-2所示
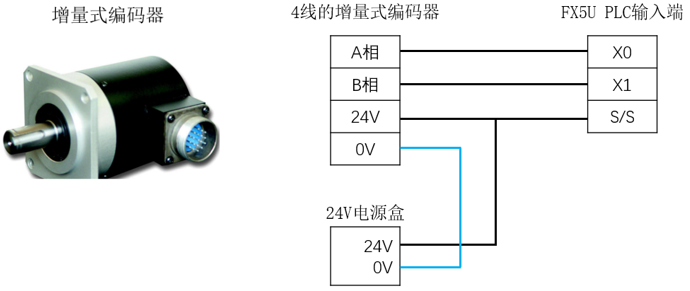
图3-2 PLC与编码器之间的接线
4、软件参数设置
(1)模拟量输出基本设置:将D/A转换允许/禁止设置改为允许,将D/A输出允许/禁止设置改为允许。如图3-3所示。
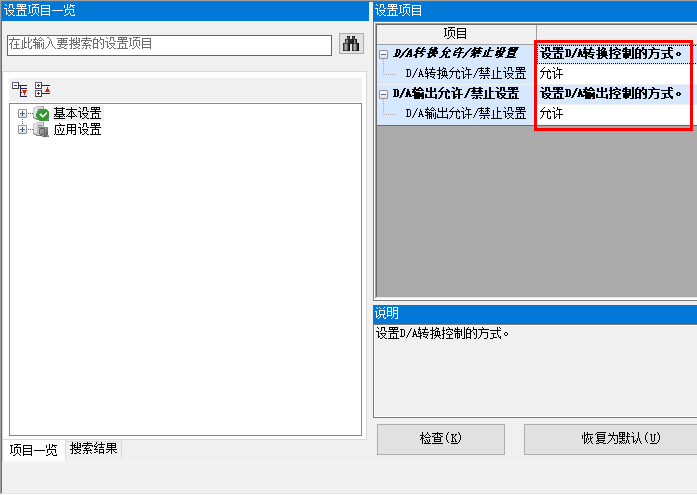
图3-3 模拟量输出基本设置
(2)高速计数器设置如图3-4所示。
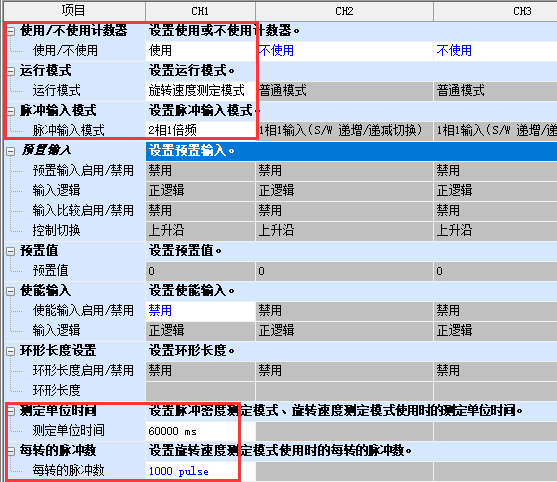
图3-4 高速计数器设置
(3)由于使用了高速计数器功能,对应的输入响应时间改快一些,设置如图3-5所示。
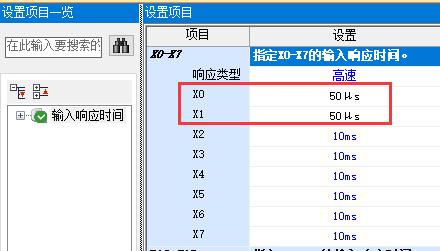
图3-5 输入响应设置
5、程序设计
当PLC上电的一瞬间,先把目标值赋值为1000,设置为逆动作,并且把输出范围设置为0~4000。当运行一瞬间并且不在运行模式和自整定模式下时把采样时间改为200ms,并且复位所有的输出。

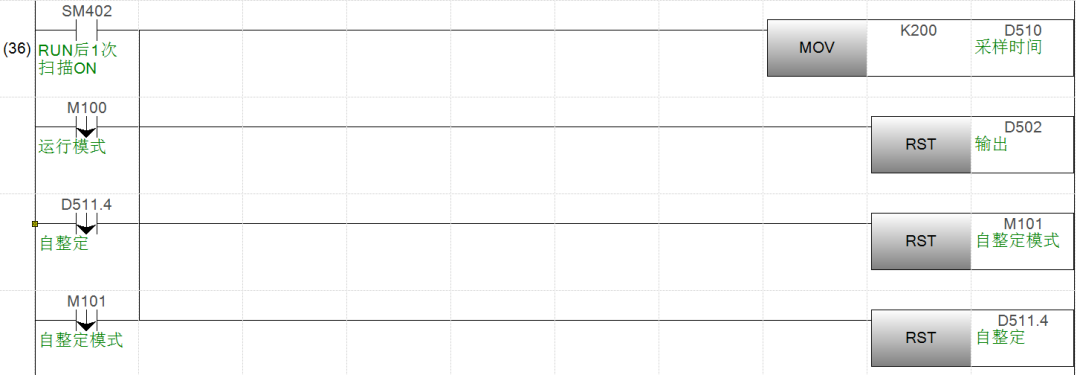
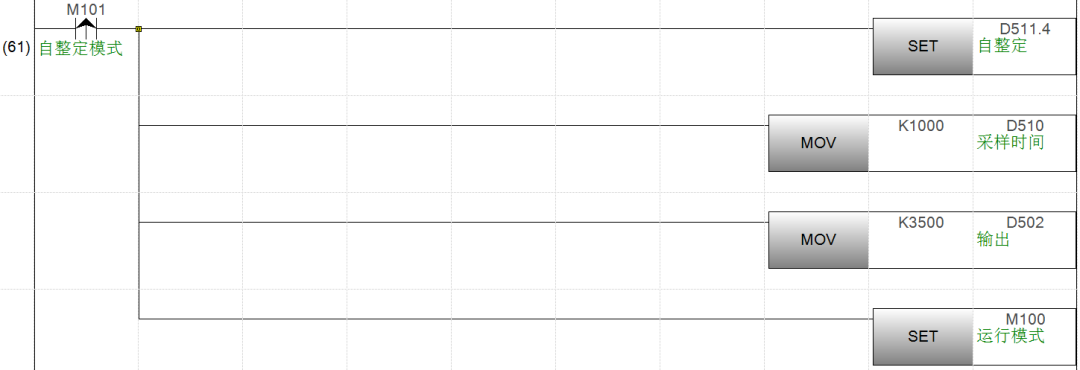
自整定模式中,把采样时间改为1S,输出开始设置为3500,并开始运行PID。
按一下启动按钮,启动PID指令并启动高速计数器通道,按下停止按钮或不在自整定状态下则停止运行。把高速通道中的旋转速度传送给D501用来做PID的测定值。
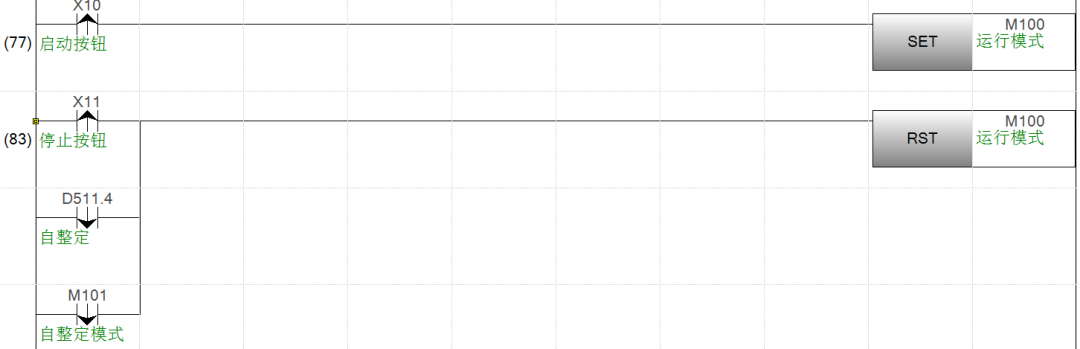
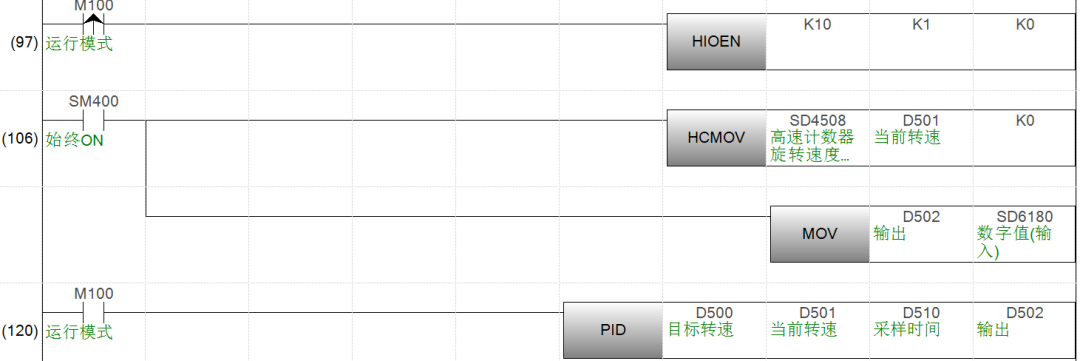
图3-6 程序设计
1、启用/停止高速计数器计数功能,指令HIOEN
(1)高速计数器的普通模式,则S1为K0;
(2)启用CH1,则S2为2#0000 0000 0000 0001,即H0001;
(3)未使用CH16~CH2,停止功能无需设置,则S3为2#0000 0000 0000 0000,即H0000。

2、读取高速计数器的当前值,指令DHCMOV
(1)将CH1的当前值SD4501、SD4500传送给D1001、D1000
(2) n的值设为为K0,则传送完成后保留s的值。

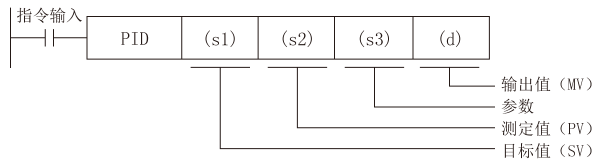
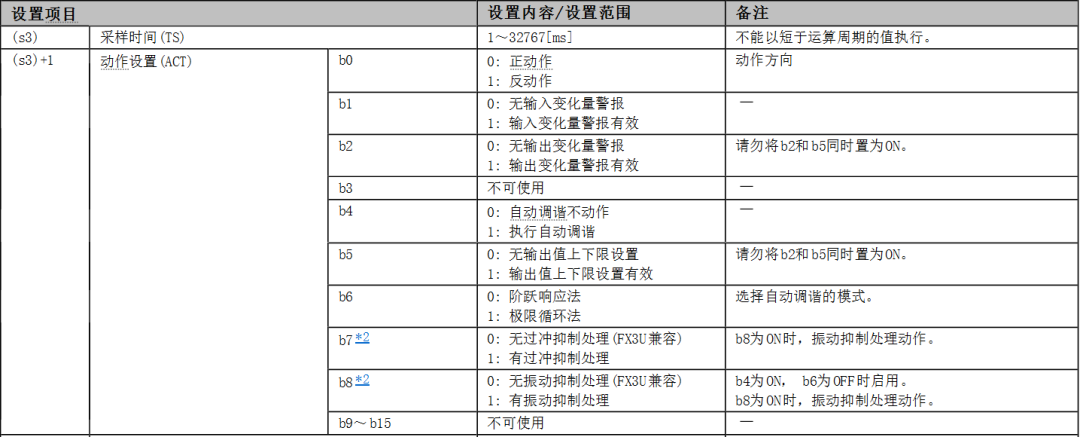
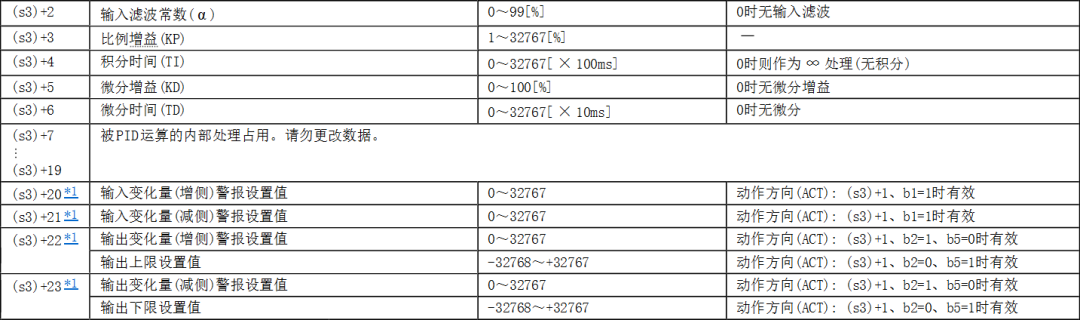
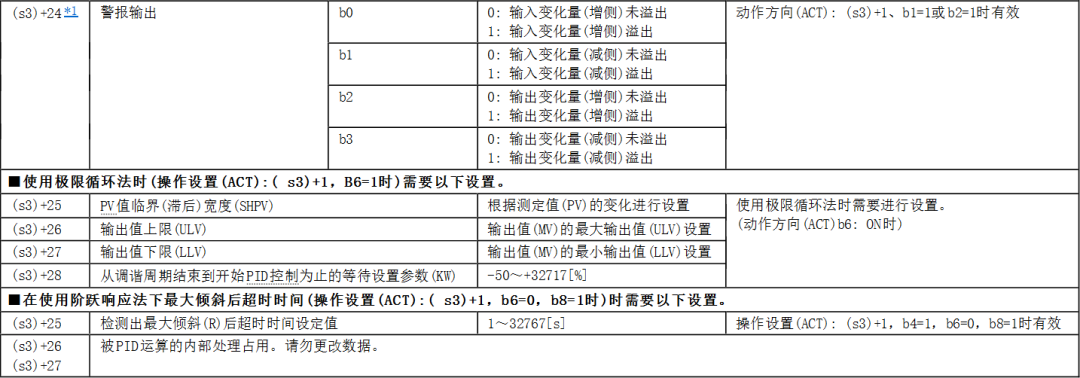
3、PID指令如下所示:
审核编辑 :李倩
-
编码器
+关注
关注
45文章
3648浏览量
134732 -
plc
+关注
关注
5013文章
13322浏览量
463993 -
模拟量
+关注
关注
5文章
491浏览量
25576
原文标题:【案例】一文讲解清楚 FX5U PID自动调节控制
文章出处:【微信号:gkongbbs,微信公众号:工控论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于PID控制的温度调节系统
三菱FX5U与威纶通触摸屏无线EtherNet通讯例程,一目了然!
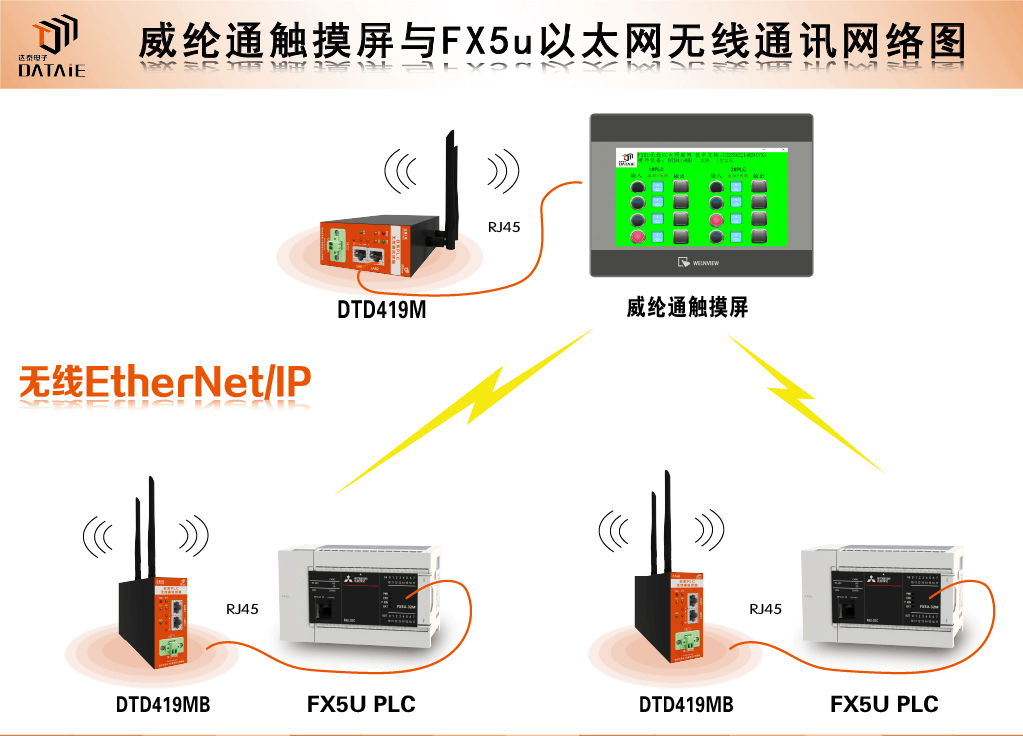
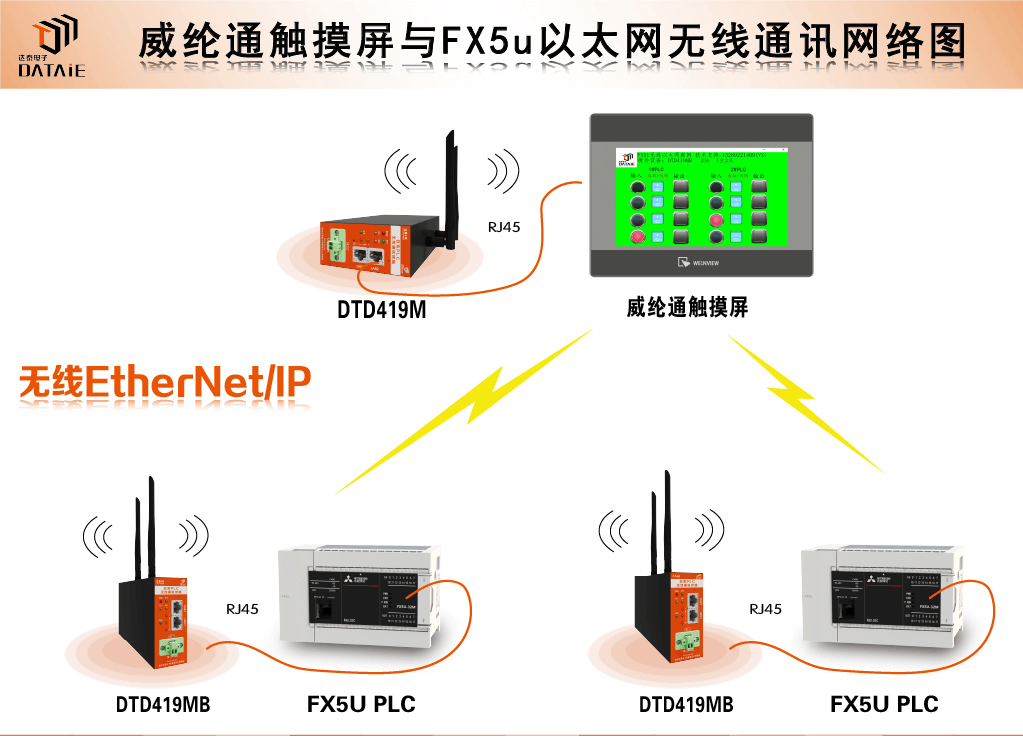
威纶通触摸屏与三菱FX5u之间 EtherNet/IP无线以太网通信方案
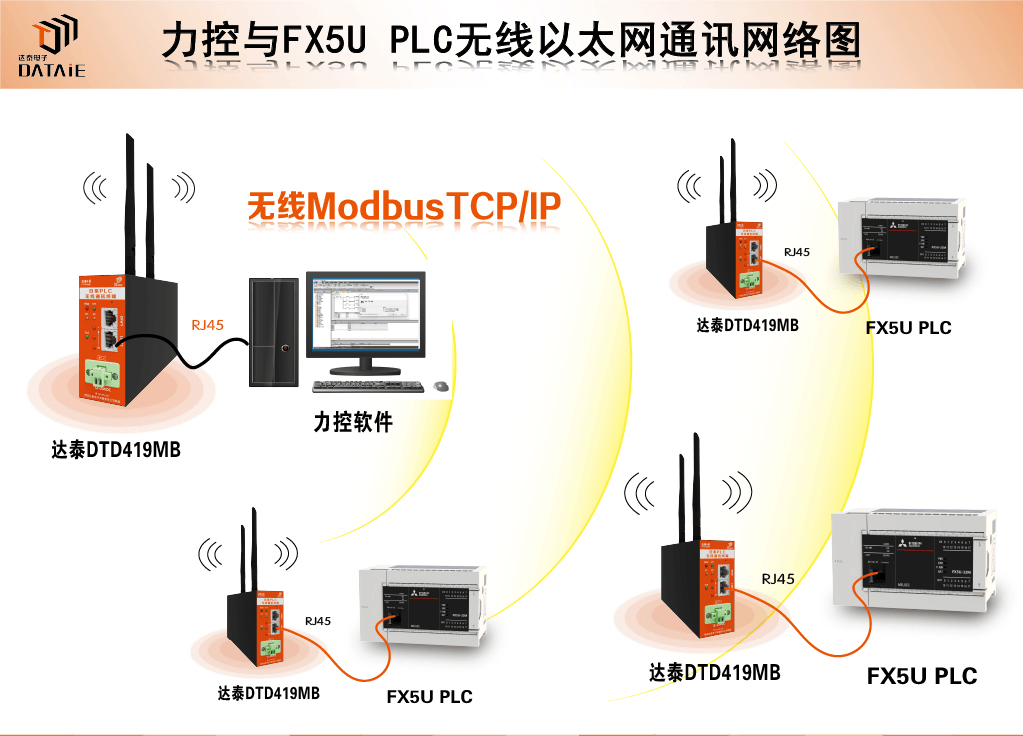
能否使用PLC无线通信模块实现力控与FX5U无线以太网通信?
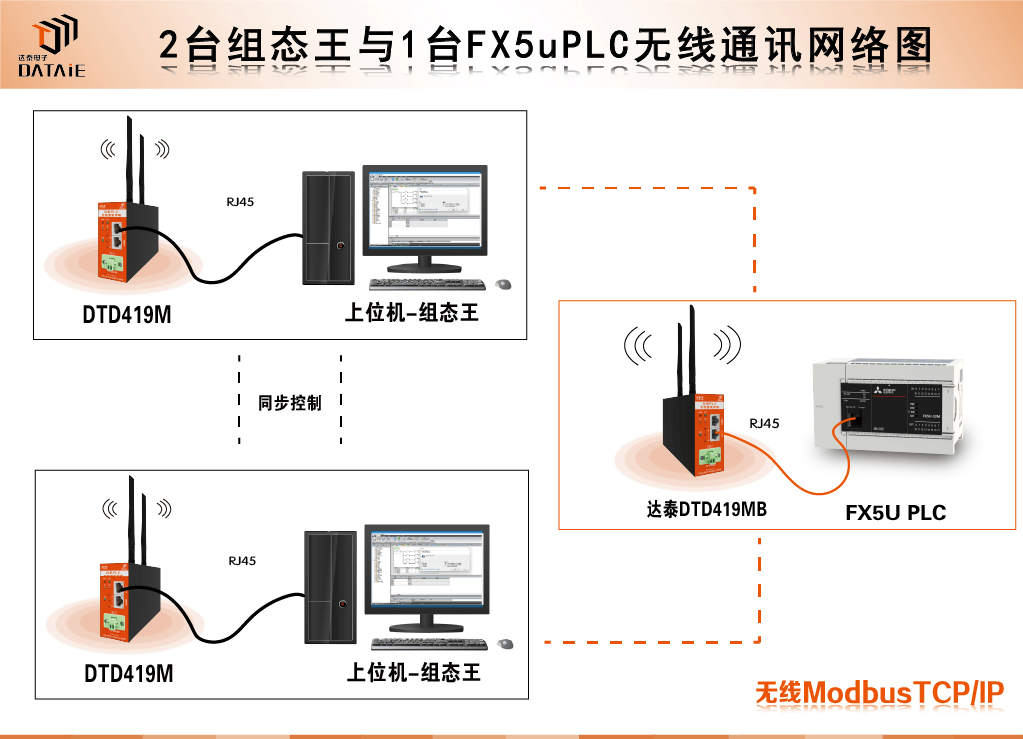
PLC无线通讯模块如何应用在2台组态王与1台FX5u之间?
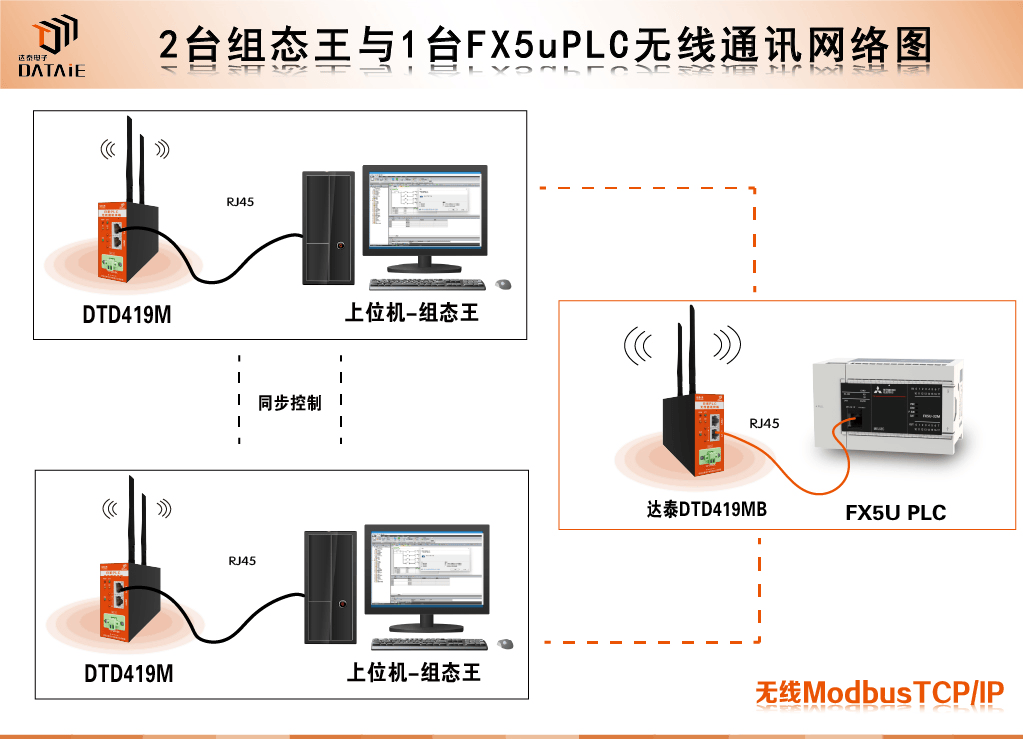
两台组态王与一台FX5u之间无线通信你见过吗?快速了解






 工商网监
工商网监
评论