 液压/交流/直流/电液,四种伺服控制系统异同辨析
液压/交流/直流/电液,四种伺服控制系统异同辨析
用来精确地跟随或复现某个过程的反馈控制系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服控制系统是一种能对试验装置的机械运动按预定要求进行自动控制的操作系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
主要指标:衡量伺服控制系统性能的主要指标系统精度、稳定性、响应特性、工作频率四大方面,特别在频带宽度和精度方面。
频带宽度简称带宽,由系统频率响应特性来规定,反映伺服系统的跟踪的快速性。带宽越大,快速性越好。伺服系统的带宽主要受控制对象和执行机构的惯性的限制。惯性越大,带宽越窄。一般伺服系统的带宽小于15赫,大型设备伺服系统的带宽则在1~2赫以下。伺服系统的精度主要决定于所用的测量元件的精度。因此,在伺服系统中必须采用高精度的测量元件,如精密电位器、自整角机和旋转变压器等。此外,也可采取附加措施来提高系统的精度,例如将测量元件(如自整角机)的测量轴通过减速器与转轴相连,使转轴的转角得到放大,来提高相对测量精度。采用这种方案的伺服系统称为精测粗测系统或双通道系统。通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
结构组成:机电一体化的伺服控制系统的结构,类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器,被控对象,执行环节,检测环节,比较环节等五部分。
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
控制器:控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
执行环节: 执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作.机电一体化系统中的执行元件一般指各种电机或液压,气动伺服机构等。
伺服系统的分类方法很多,常见的分类方法有以下三种: (1)按被控量参数特性分类.
(2)按驱动元件的类型分类. 伺服控制系统按所用控制元件的类型可分为机电伺服系统、液压伺服系统(液压控制系统) 和气动伺服系统。
(3)按控制原理分类. 伺服系统可分为开环控 制伺服系统、闭环控制伺服系统和半闭环控制伺服系统。
常见的四种伺服控制系统如下:(1) 液压伺服控制系统 液压伺服控制系统是以电机提供动力基础,使用液压泵将机械能转化为压力,推动液压油。通过控制各种阀门改变液压油的流向,从而推动液压缸做出不同行程、不同方向的动作,完成各种设备不同的动作需要。液压伺服控制系统按照偏差信号获得和传递方式的不同分为机-液、电-液、气-液等,其中应用较多的是机-液和电-液控制系统。按照被控物理量的不同,液压伺服控制系统可以分为位置控制、速度控制、力控制、加速度控制、压力控制和其他物理量控制等。液压控制系统还可以分为节流控制(阀控)式和容积控制(泵控)式。在机械设备中,主要有机-液伺服系统和电-液伺服系统。
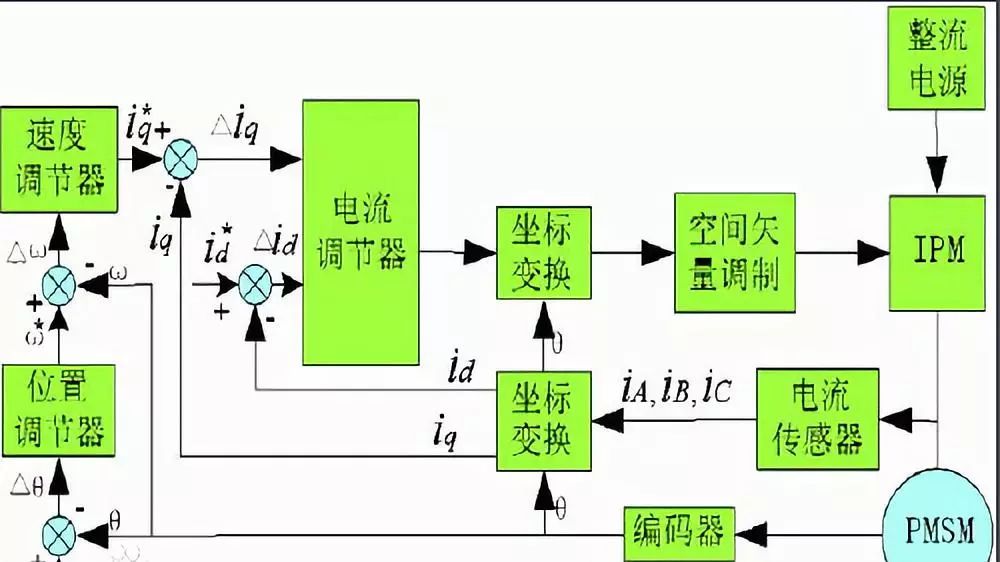
(2) 交流伺服控制系统 交流伺服控制系统包括基于异步电动机的交流伺服系统和基于同步电动机的交流伺服系统。除了具有稳定性好、快速性好、精度高的特点外,具有一系列优点。它的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
(3) 直流伺服控制系统 交流伺服控制系统的工作原理是建立在电磁力定律基础上。与电磁转矩相关的是互相独立的两个变量主磁通与电枢电流,它们分别控制励磁电流与电枢电流,可方便地进行转矩与转速控制。另一方面从控制角度看,直流伺服的控制是一个单输入单输出的单变量控制系统,经典控制理论完全适用于这种系统,因此,它凭借控制简单,调速性能优异,在数控机床的进给驱动中曾占据着主导地位。
(4) 电液伺服控制系统 它是一种由电信号处理装置和液压动力机构组成的反馈控制系统。最常见的有电液位置伺服系统、电液速度控制系统和电液力(或力矩)控制系统。
以上是我们常用到的四种伺服系统,他们的工作原理和性能以及可以应用的范围都有所区别,各有自己的特点和优缺点。因此在选择或者购买的时候,就需要根据系统的需要以及需要控制的参数和实现的性能,通过计算后在选择合适的产品。
技术要求:1.系统精度 伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差,稳态误差和静态误差三个方面组成。
2.稳定性 伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能力;或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。
3.响应特性 响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率.响应速度与许多因素有关,如计算机的运行速度,运动系统的阻尼和质量等。
4.工作频率 工作频率通常是指系统允许输入信号的频率范围.当工作频率信号输入时,系统能够按技术要求正常工作;而其它频率信号输入时,系统不能正常工作。
审核编辑 :李倩
-
操作系统
+关注
关注
37文章
6816浏览量
123313 -
伺服系统
+关注
关注
14文章
572浏览量
39210 -
伺服控制系统
+关注
关注
1文章
54浏览量
12252
原文标题:液压/交流/直流/电液,四种伺服控制系统异同辨析
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

交流伺服电机与直流伺服电机的对比分析
闭环伺服控制系统原理及特点
交流伺服电机与直流伺服电机的区别
电气伺服驱动装置包括直流伺服和交流伺服吗
探索计算机建模与仿真在液压伺服控制系统中的应用






 工商网监
工商网监
评论