 高性能惯性传感解决方案支持自主机器应用
高性能惯性传感解决方案支持自主机器应用
工业机械的自动化,无论是在制造业、农业、物流、能源、汽车还是无人机中,都有望在资源效率、设备精度和安全性方面获得巨大收益。这些收益的一个关键推动因素是确定适当的传感技术,以增强对设备状况的上下文知识。在某种程度上,设备的位置或位置也是等式的宝贵输入,那么精密惯性传感器有望从根本上精确定位位置或保持精确定位。在那些以移动性为因素的应用中,耦合位置和上下文传感器信息具有重要价值。在许多情况下,在复杂或恶劣的环境中操作时确定位置具有特别重要的价值。这种移动物联网(IoMT)在提高效率的道路上面临许多挑战,而高性能惯性传感器正在帮助改变现状。
传感器推动机器自动化
随着机器从简单的无源测量发展到包含嵌入式控制功能,再到现在的完全自主操作,传感器正在发挥推动作用。无论是支持离线分析的简单测量,还是过程控制,许多此类传感器都可以单独工作。对获取实时优势的渴望,以及日益广泛的传感类型和高效处理的可用性,在传感器融合方面取得了重要进展,以最好地确定跨多个应用和环境状态的上下文。最后,在涉及多个平台交互并需要了解过去系统状态的复杂系统中,连接性的进步正在支持日益智能的传感器系统,如表1所述。
| 传感器 | 基本、单、传感元件 |
| 多传感器 | 识别多种传感类型,以满足应用需求 |
| 熔断传感器 | 使用一个传感器校正另一个传感器或状态驱动 传感器之间的切换 |
| 智能传感器 | 本地化、嵌入式处理、支持 实时分析和决策 |
| 连接的传感器 | 通信链路支持跨平台 信息共享 |
| 智能传感器 | 跨时间(例如:云、数据库)利用信息来适应和学习 |
这些智能且易于访问的传感器系统正在彻底改变原本成熟的行业,将农业转变为智能农业,将基础设施转变为智能基础设施,将城市转变为智能城市。随着传感器的部署以在这些环境中收集相关的上下文信息,数据库管理和通信出现了新的复杂性,不仅需要传感器之间的复杂融合,还需要跨平台和跨时间的复杂融合(例如:基于云的基础设施状况随时间变化的分析、去年的作物产量或交通状况和模式),如图 1 所示。
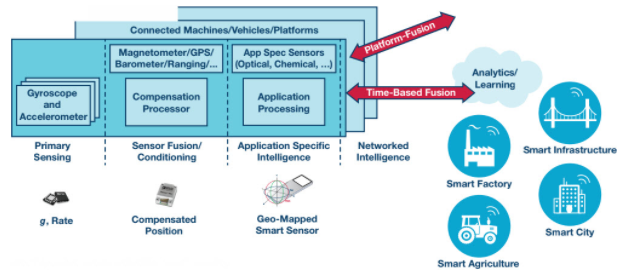
图1.面向位置感知工业智能传感集成。
在某些情况下,移动性很重要,则需要对这些上下文传感器数据进行地理定位。事实上,物联网很少可以被认为是静态的。工厂、田野和医院中的设备在移动时更有用,地理静态设备上的光学传感器仍然可能在局部移动,需要转向和指向。这种移动物联网(表2)融合了上下文和位置数据,并从根本上放大了数据的有用性和效率收益。例如,为了分析产量提高机会,想象一下知道单独种植的种子的温度、湿度和精确位置与仅仅知道随机种植的种子田的温度和土壤条件的相关性差异。
| 物联网情境传感器 | 位置传感器 | |||
| 温度 | + | 惯性的 | = | 物联网 |
| 光学的 | 全球定位系统 | |||
| 化学的 | 磁力计 | |||
| 气 | 晴雨表 | |||
| 振动 | 测距 |
智能机器中的惯性传感器
惯性传感器在大多数智能机器中有两个主要功能;设备稳定和指向,或导航和制导,如图 2 所示(单独且重要的用途是振动分析和状态监测,详见其他)。虽然GPS由于其无处不在而可能被认为是大多数系统的首选导航辅助工具,但在某些情况下,依赖GPS存在重大问题,主要是由于潜在的阻塞。在 GPS 阻塞期间过渡到惯性检测是有效的,但前提是惯性具有足够的质量以在中断期间提供足够的精度。在稳定或伺服回路的情况下,反馈机制中可以依靠惯性传感器来保持无人机上天线、起重机平台、建筑刀片、农具或摄像头的可靠指向角度。在所有这些示例中,目的不仅仅是提供有用的功能(例如,移动电话中的手势控制),而是在极其困难的环境中提供关键的准确性或安全机制(见表3)。
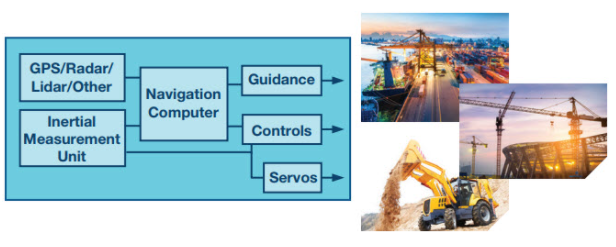
图2.惯性测量单元在传统其他传感器具有局限性的应用中起着关键的稳定和定位作用。
| 主要挑战 |
| GSP 堵塞中的厘米级精度 |
| 即使在振动、极端温度、风等条件下也能保持精度。 |
| 可靠、安全运行,所有条件 |
传感器质量至关重要
有一个神话,或者也许是梦想,传感器融合算法可以用来将良好的性能编码到其他边缘传感器技术中。传感器融合可用于某些校正,例如,温度传感器用于校正另一个传感器的温度漂移,或加速度计 (g) 传感器用于校正陀螺仪上的重力效应。即使在这些情况下,这实际上也只是根据环境校准给定的传感器。它不会提高其在校准点之间保持性能的固有能力,它只是对其进行插值。质量差的传感器通常漂移得足够快,如果没有大量或昂贵的校准点,精度会迅速下降。
然而,即使在高质量的传感器中,通常也需要一定量的校准,以便从设备中提取尽可能高的性能。实现这一点的最具成本效益的方法取决于传感器的复杂细节和对运动动力学的深入了解(见图3),更不用说使用相对独特的测试设备了。因此,校准和补偿步骤越来越被视为传感器制造商的嵌入式必需品。
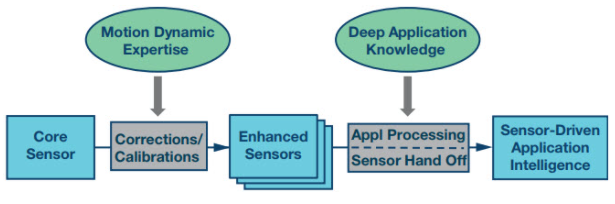
图3.从惯性传感器中提取有价值的应用级信息需要复杂的校准和高阶处理。
将基本传感输出转换为有用的应用级智能的第二个重要步骤是状态驱动的传感器切换。这需要对应用动态以及传感器的功能有广泛的了解,以便最好地确定在任何给定时间点可以信赖的传感器。
传感器融合在工业应用中的作用的概念示例如图4所示。在这里,对于精密驱动的工业应用,已经仔细选择了传感器,以支持在高潜在GPS阻塞,潜在困难磁场和其他环境干扰下运行的预期需求。出于这个原因,惯性传感器的无基础设施特性被高度依赖,其他传感辅助工具被选择来支持特定的环境挑战,并帮助纠正任何长期惯性漂移。虽然最好计划传感器选择以允许在所有条件下进行精确跟踪,但这实际上是不可能的。因此,情景规划中仍然保留了一小部分不确定性。这些算法用于有价值的传感器校准,以及管理由应用状态驱动的复杂的传感器到传感器的切换。
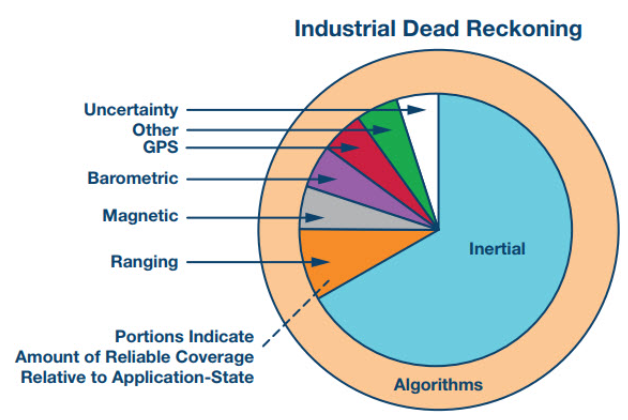
图4.传感器融合算法依赖于精确传感器,这些传感器经过适当选择以支持特定的应用环境。
最终,最终应用将决定所需的精度水平,而所选传感器的质量将决定这是否可实现。
表4对比了两种情况,说明了传感器选择不仅对设计过程,而且对设备精度的重要性。如果低精度传感器仅在有限的情况下依赖,并且应用具有误差容限,则实际上可能适用。换句话说,如果它不是安全或生命攸关的,其相对不精确的精度就足够好了。尽管大多数消费级传感器具有低噪声并且在良性条件下表现良好,但它们不适用于受动态运动(包括振动)影响的机械,在低性能惯性测量单元中,振动无法与所需的简单线性加速度或倾斜测量分开。为了在工业环境中工作时实现优于 1 度的精度,该选择侧重于专门设计用于抑制振动或温度影响引起的误差漂移的传感器。这样,这种高精度传感器就能够在更长的时间段内支持更大范围的预期应用状态。
| 惯性传感器质量 | 特性 | 在传感器融合中的作用 | 传感器融合后的精度 | 适用于: |
| 高精度 | 超低噪音,所有工况下稳定运行 | 主传感器,高度依赖,能够支持恶劣/不可预测的条件 | ~0.1° | 运动复杂,寿命长,任务关键型 |
| 精度低 | 低至中等噪声,稳定性差,振动温度冲击下的漂移未指定 | 具有低重量、受限或有条件可靠性的备用传感器 | 3° 至 5° | 运动简单、寿命短、容错用例 |
高性能惯性
针对性能进行设计不一定仅限于为成本、尺寸和功耗方面的效率而设计。然而,以降低成本为主要目标的MEMS结构设计通常会牺牲性能,有时甚至会显著牺牲性能。一些降低成本的简单选择,例如更少的硅质量和塑料封装的消费类封装,在很大程度上不利于MEMS性能。从微机电设备(如图5所示)中提取准确稳定的信息,需要由硅面积和厚度驱动的强信噪比,以及从元件封装的选择到系统级外壳的最小硅应力。在传感器定义之初就考虑到最终用途的性能要求,可以优化硅、集成、封装以及测试和校准方法,即使在复杂环境下也能保持原生性能,并最大限度地降低成本。
表5显示了中级工业设备与手机中的典型消费类传感器相比所展示的性能(请注意,也有更高端的工业设备,比所示设备好一个数量级)。大多数低端消费类器件不提供参数规格,如线性加速度效应、振动校正、角度随机游走等,这些参数实际上可能是工业应用中最大的误差源。
| 参数 | 典型工业规格 | 单位 | 与典型消费类设备相比,增量改进 |
|
陀螺 |
|||
| 动态范围 | 最多 2000 年 | °/秒 | ~ |
| 噪声密度 | 0.004 | °/秒/√赫兹有效值 | 2× |
| 角度随机游走 | 0.2 | °/√小时 | 2× |
| 运行稳定性 | 5 | °/人力资源 | 3× |
| 偏置重复性 | 0.2 | °/秒 | 100× |
| −3 dB带宽 | 465 | 赫兹 | 2× |
|
加速度 计 |
|||
| 动态范围 | 最多 40 年 | g | 3× |
| 噪声密度 | 25 | 微克/√赫兹有效值 | 10× |
| 速度随机游走 | 0.03 | 米/秒/√小时 | 10× |
| 运行稳定性 | 10 | 微型克 | 10× |
| 偏置重复性 | 25 | 毫克 | 100× |
| −3 dB带宽 | 500 | 赫兹 | 2× |
| 轴向对准 | 0.05 | 度 | 20× |
| 线性加速度效应 | 0.01 | °/秒/g | 10× |
| 振动校正 | 0.004 | °/秒/g2 | 10× |
| 灵敏度温度 | 25 | 页/°C | 10× |
| 偏置天普科 | 0.007 | °/s/°C | 10× |
该工业传感器设计用于预期相对快速或极端运动(2000°/秒,40 g)的场景,其中宽带宽传感器输出对于实现最佳信号辨别也至关重要。希望工作期间的偏移漂移最小(在运行稳定性中),以减少对更大一套互补传感器的依赖来校正性能,在某些情况下,在无法承受后端系统滤波校正所需时间的应用中,最小化导通漂移(可重复性)至关重要。低噪声加速度计与陀螺仪配合使用,以帮助区分和校正任何与g相关的漂移。
陀螺仪传感器实际上设计用于直接消除任何g事件(振动,冲击,加速度,重力)对设备偏移的影响,从而为线性g提供了实质性的优势。而且,通过校准,温度漂移和对准都得到了纠正。如果没有对准校正,典型的多轴MEMS器件,即使集成到单个硅结构中,也可能错位,成为误差预算的主要贡献者。
虽然近年来噪声在传感器类别中变得不那么重要,但线性g效应和未对准等参数,无论是通过硅设计方法还是通过特定部件的校准,改善成本最高的参数,在简单或相对静态的运动测定之外的任何应用中都会成为噪声加法器。表6提供了一个用例示例,将实际工业MEMS IMU与消费类IMU进行了比较,两者都具有相对较强的噪声性能。但是,消费类设备不是针对振动或对齐而设计或校正的。该示例基于所述假设显示了器件规格及其对误差预算的影响。总误差是三个图示误差源的和方根,线性g和交叉轴(未对准)在消费类器件中占误差的主导地位,而工业器件则平衡得更好。最终,实现了至少 20× 的性能差异,而无需考虑不太坚固耐用的消费产品的其他潜在误差源。
| 抖动 = 噪声 RSS + 振动 + 跨轴灵敏度 | ||||
| 示例 IMU 的主要规格 |
工业 |
消费者 |
||
| 性能 | 规范 | 冲击 | 规范 | 冲击 |
| 噪声密度(°/秒/√Hz) | 0.004 | 0.036 | 0.0100 | 0.089 |
| 线性-g (°/秒/g) | 0.01 | 0.020 | 0.100 | 0.200 |
| 十字轴 (%) | 0.09% | 0.090 | 2.00% | 2.000 |
| 预计误差(°/秒) | 0.099 | 2.012* | ||
|
假设:50 Hz 带宽,2 g-rms 振动,100 °/s 离轴旋转 *最佳情况:不包括其他漂移因子 |
系统权衡
大多数复杂的运动应用都需要完整的IMU(线性加速度和角速率运动的三个轴)来充分确定定位。目前,IMU 功能以芯片级(消费级)形式和模块级集成(工业)形式提供,参见图 6 中的工业 IMU 示例。虽然从逻辑上讲,消费级芯片级IMU在系统集成方面似乎更先进,但当最终目标是在复杂的工业环境中准确确定运动时,情况正好相反。对于工业 IMU,开箱即用的高性能。在应用的整个生命周期内都能可靠地实现相同才能尝试实现类似的性能水平(通常甚至不可能),并且可能仍然无法实现同样可靠的操作。
位置感知型工业智能传感器正在实现机器自动化的巨大效率提升。系统级的准确性和可靠性主要取决于核心传感器质量,而不是围绕核心传感器质量的系统和软件。尽管如此,当围绕质量传感器构建时,该方法的整体集成、嵌入式软件和连接性允许智能传感解决方案,这可以大大提高信息的质量和实用性,而不会牺牲同样重要的安全性和可靠性。
审核编辑:郭婷
-
传感器
+关注
关注
2548文章
50698浏览量
752040 -
嵌入式
+关注
关注
5068文章
19021浏览量
303353 -
物联网
+关注
关注
2903文章
44284浏览量
371323
发布评论请先 登录
相关推荐
emc存储解决方案的优势
ABB高性能矢量型变频器ACS380的性能优势

高性能电流传感器与控制器解决方案
昊衡科技推出OFDR光纤传感教学解决方案——助力打造更高性价比的教学方案

微视传感高性能3D视觉产品亮相2024上海机器视觉展
LM98725高性能16位81 MSPS信号处理解决方案


EVASH + 云汉芯城战略合作 购买EVASH Ultra EEPROM,解决采购难题,轻松获取高性能存储解决方案!
导远科技在北京车展展示其自主研发的新一代MEMS惯性导航芯片

爱普生(EPSON)应用于割草机惯性导航高性能陀螺仪传感器SGPM01





 工商网监
工商网监
评论