 加速ROS2为机器人带来自适应计算能力
加速ROS2为机器人带来自适应计算能力
从ROS到ROS2
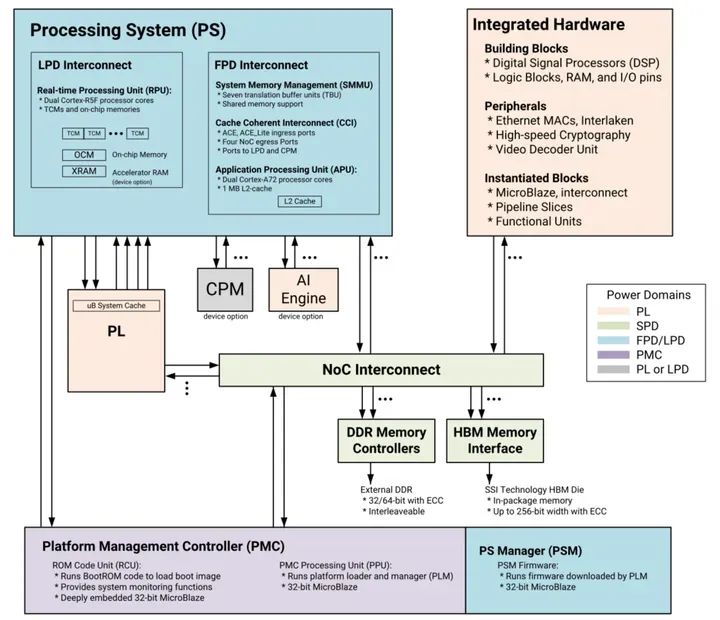
机器人的自适应计算
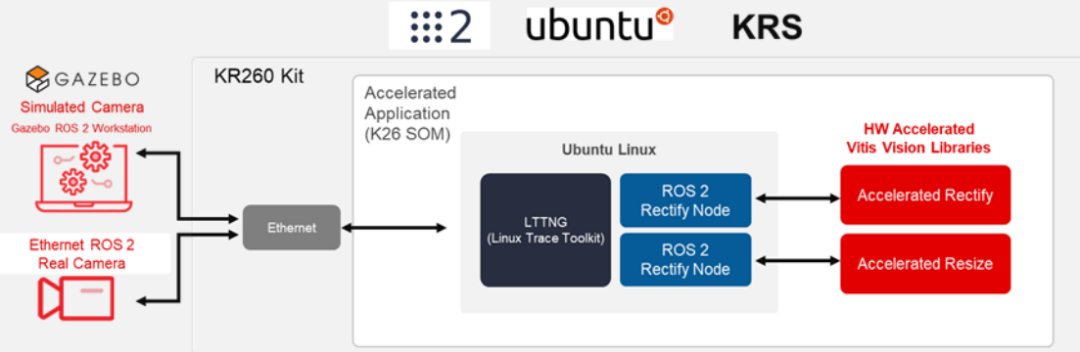
ROS2与机器人自适应计算


写在最后


更多热点文章阅读
马斯克:预计6个月后进行大脑芯片的人体试验,愿意给自己孩子植入 硅料降价拐点来临,光伏市场有望重启装机潮 造车新势力11月销量:哪吒第一,蔚理进前三,小鹏依旧垫底 行业机构频发警报 2023年全球半导体市场面临下滑风险 富士康失去iPhone 14 Pro独家代工资格!立讯和硕上位,果链格局大变?
原文标题:加速ROS2为机器人带来自适应计算能力
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电子发烧友网
+关注
关注
1010文章
544浏览量
164306
原文标题:加速ROS2为机器人带来自适应计算能力
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器人技术的发展趋势
机器人技术的发展趋势呈现出多元化、智能化和广泛应用的特点。 一、智能化与自主化 人工智能(AI)与机器学习 : AI和机器学习在机器人领域的应用日益普及,
ALINX受邀参加AMD自适应计算峰会
近日,AMD 自适应计算峰会(AMD Adaptive Computing Summit, 即 AMD ACS)在深圳举行,聚焦 AMD 自适应 SoC 和 FPGA 产品最新动态,以及设计工具和开发环境的前沿技巧,是全球硬件开发者和工程师们深入交流与学习的优质平台。
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,简单快捷地调用合适的算法库,以提高开发效率,加快开发进程。
(2) 开源免费,架构精简
ROS系统是一个开源免费,架构精简的机器人操作系统。ROS被设计
发表于 07-09 11:38
PMP22165.1-适用于 Xilinx 通用自适应计算加速平台 (ACAP) 的电源 PCB layout 设计
电子发烧友网站提供《PMP22165.1-适用于 Xilinx 通用自适应计算加速平台 (ACAP) 的电源 PCB layout 设计.pdf》资料免费下载
发表于 05-19 10:45
•0次下载

ZMC900E控制器之ROS2环境安装指南
ZMC900E是致远电子研发的最新一代高性能EtherCAT控制器,支持ROS2系统,兼备强大功能和实时性,为工业应用带来新的可能。本文将详述ROS2特点和安装,助力用户在

【ALINX 技术分享】AMD Versal AI Edge 自适应计算加速平台之 Versal 介绍(2)
【ALINX 技术分享】AMD Versal AI Edge 自适应计算加速平台之 Versal 介绍,以及Versal 芯片开发流程的简介。
【ALINX 技术分享】AMD Versal AI Edge 自适应计算加速平台之准备工作(1)
AMD Versal AI Edge 自适应计算加速平台之准备工作,包含软件环境、硬件环境。
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
移动机器人与ROS操作系统原理与应用
与ROS1不同的是,ROS2诞生的目的就是为了让更多机器人使用,所以在设计上更加符合技术的发展方向,也运用了很多最近的技术框架。
发表于 01-02 12:28
•536次阅读
在TogetherROS中如何安装ROS2功能包
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2中的功能,所有

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。图1
随着工业智能化的快速发展,智能机器人设备已成为工业自动化体系的佼佼者,而智能机器人设备核心—ROS
发表于 11-30 16:01
ROS系统是什么?ROS系统主要特点有哪些?创龙RK3568J+Debian的ROS2系统案例
Tronlong创龙科技ROS让机器人开发更便捷;我们来看看具体的。 ROS系统是什么 ROS(Robot Operating System)是一个适用于

ROS2中自带例程测试
如果你是一个ROS2的开发者,可能对刚才我们使用的ROS2命令比较熟悉,这时你可能也会产生一个问题:我们之前也安装了ROS2系统,那ROS2的原生功能还可以正常运行么? 我们再来试一试

机器人的ROS模型建立
这个系列主要介绍机器人ROS模型的建立方法,ROS系统带来的好处之一就是: 我们无需自己建立复杂的数学模型来描述自己的机器人几何尺寸、运动学
ros1和ros2的通信模型
数据 ROS2: 参与者(DomainParticipant):一个参与者Participant就是一个容器,对应于一个使用DDS的用户,任何DDS的用户都必须通过Participant来访问全局






 工商网监
工商网监
评论