 基于高光谱特征的土壤含水量遥感反演方法-莱森光学
基于高光谱特征的土壤含水量遥感反演方法-莱森光学
0引言
随着遥感技术的广泛应用,微波、热红外和光学遥感估算土壤含水量的潜力也被大家所认可。在微波遥感(5~1000mm)估算土壤含水量与波长后向散射系数有关,其在大范围的应用中效果明显,但是不足之处是它的空间分辨率较低,不适用于小尺度以及野外测量;
对于热红外遥感(3.5~14μm)监测反演土壤含水量,一般来说,当与能够提供植被指数的光学传感器协同使用时, 其估算精度较高,但反演计算过程中涉及多种复杂的导数,反演解算过程较为繁琐,研究小范围的土壤含水量情况下不推荐使用该方法,更推荐在大面积情况下使用; 高光谱分辨率的光学遥感(400~2500nm),通常称为高光谱遥感 ( hyperspectral remote sensing,HRS),由于土壤含水量 θ 与土壤的高光谱反射率 R之间的相关性较大,将其与地面、机载和高空传感系统结合使用,可以在不同时空尺度上估算出土壤含水量。 因此,HSR被认为是解决上述估计土壤含水量 θ 存在空间分辨率低、适用范围小等问题上最有前途的遥感技术之一。
土壤含水量与光谱反射率关系
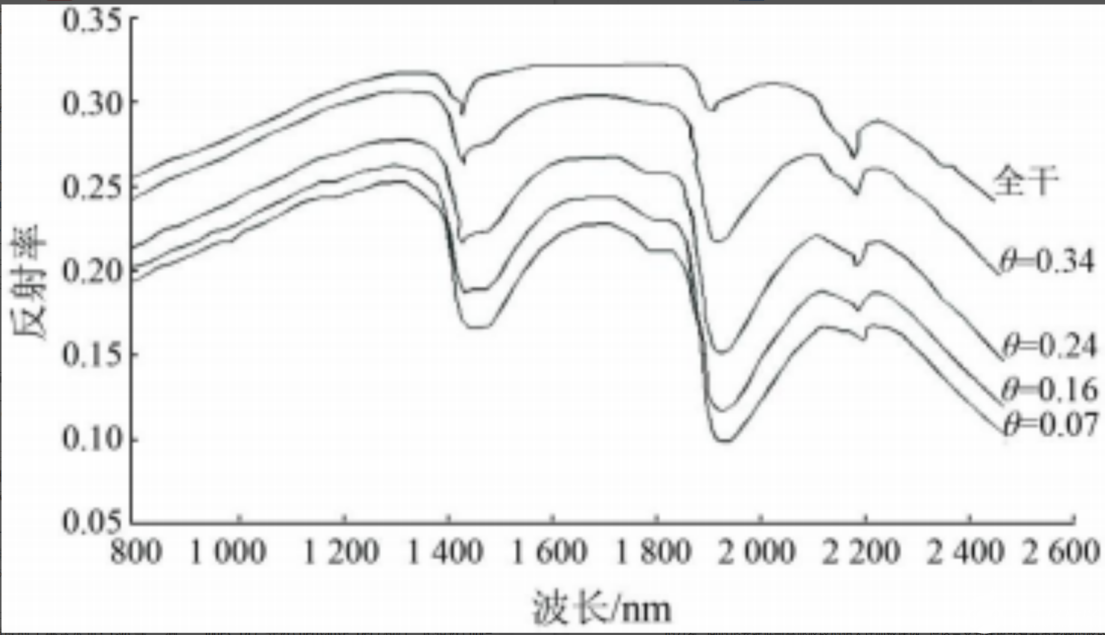
图 1 θ-R的变化关系
图1反映的是土壤反射率随波长的变化关系。从图1可看出不同波长所对应土壤的反射率不尽相同,在1450nm和1900nm波长附近土壤反射率较低,出现了明显的波谷,在1300nm和1700nm波长附近土壤反射率达到了一个较高值,出现了较为明显的波峰。
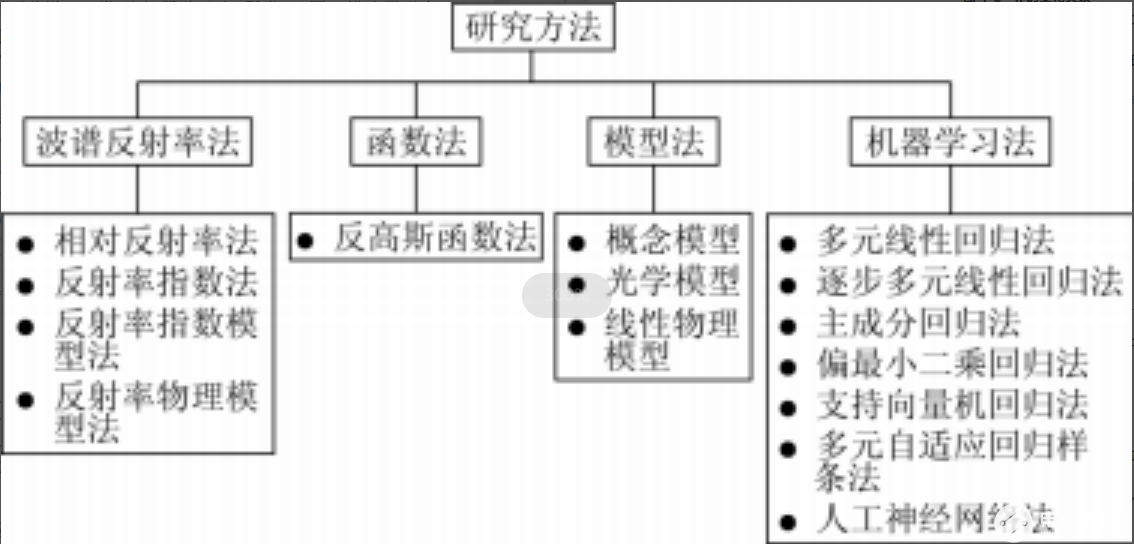
图2 θ-R关系的不同分类方法
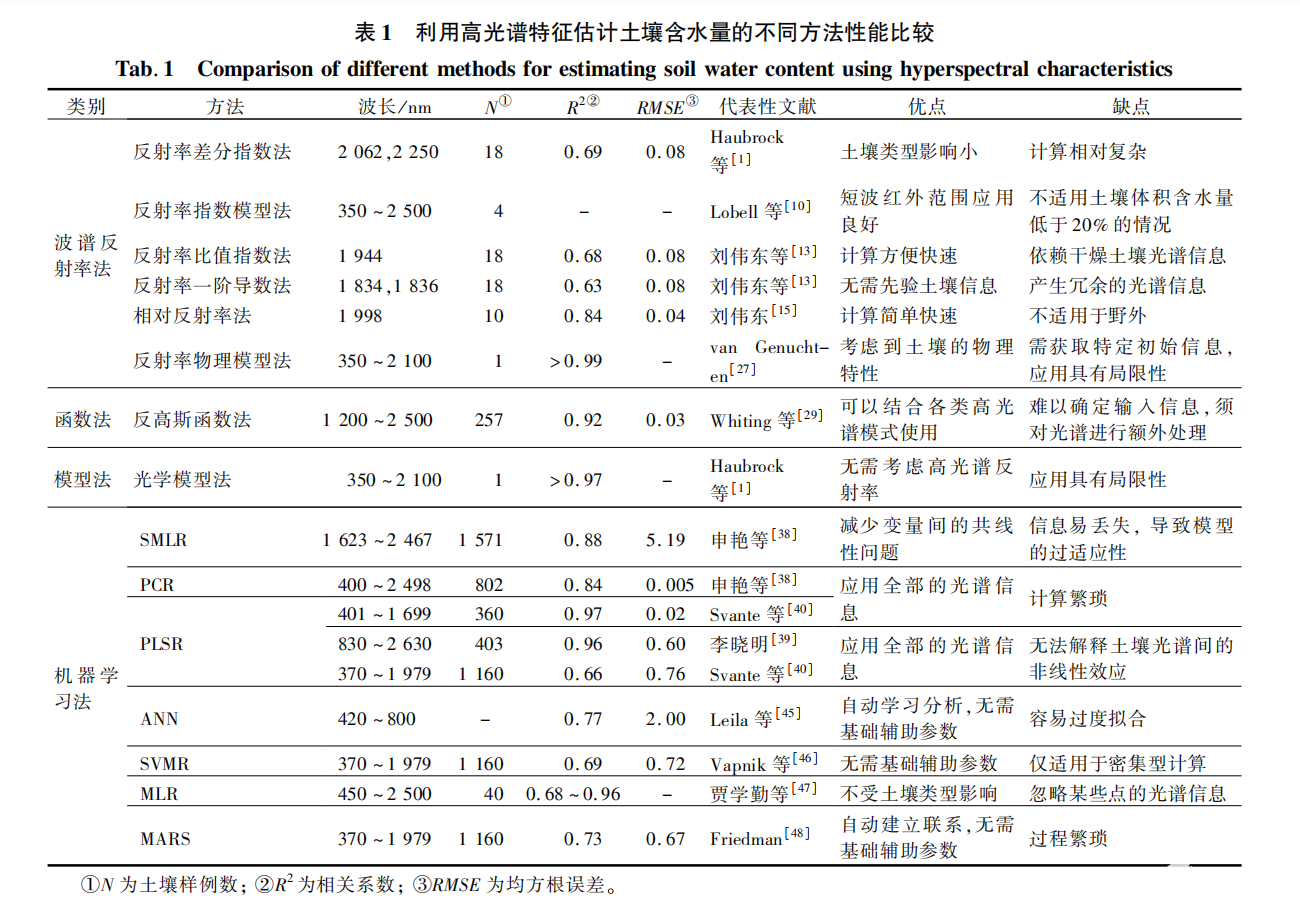
将建立θ-R关系的方法分为以下4类:光谱反射率法(Ⅰ类)、函数法(Ⅱ类)、模型法(Ⅲ类)和机器学习法(Ⅳ类)。 图2描述了现有θ-R关系的不同分类方法。
波谱反射率法
相对反射率法:
刘伟东等证明了简单线性和非线性函数估算土壤含水量的效用,并描述了土壤在每个波段的反射率 R 与相对反射率 R*(在非干燥条件下)之间的关系,公式为:
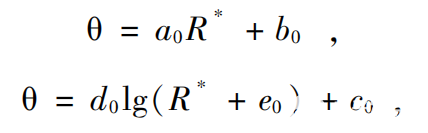
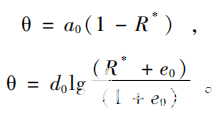
式中 a0 ,b0 ,c0 ,d0 和 e0 为辅助参数。 在低于临界水平的低湿度条件下,即在干燥条件下(θ =0),R*=1时,上述方程可修改为:
函数法
Whiting等将反高斯函数 g(λ)与土壤光谱反射面相结合来估算土壤含水量,其反射面积A和振幅Z的参数与θ相关联。当使用短波红外波长进行计算时,辅助参数与反射面积A高度相关,2800nm左右的波长范围对其影响较大。 g(λ),A和Z的计算公式分别为:
式中:λ0和 λi分别为光谱反射面中心和拐点处的波长;σ为从光谱反射面区域中心到拐点的距离;erf(*)为误差函数。
模型法
光学模型:
Nolet等针对小面积湿润土壤反映出来的土壤反射率的变化很小,因而忽略了该部分造成的影响,并提出了一个基于兰伯特定律的针对沿海海滩砂砾进行分析的简单指数模型,公式为:

式中 β为湿润的海滩砂砾发生散射造成光谱反射率降低的影响因子。
机器学习法
深度学习法包括几种统计和机器学习方法,即多元线性回归法( multiple linear regression,MLR)、逐步多元线性回归法(stepwise multiple linear regres-sion,SMLR)、主成分回归法(principal component re-gression, PCR)、 偏最小二乘回归法 ( partial leastsquares regression,PLSR),支持向量机回归法( sup-port vector machine regression ,SVMR)、多元自适应回归样条法 ( multiple adaptive regression spline ,MARS)和人工神经网络法(artificial neural network,ANN)。
结论及展望
根据不同土壤光谱反射率与土壤含水量之间的关系,本文将 θ -R 研究方法分成4 类,并从精度、复杂性、辅助数据要求、不同遥感模式下的可操作性以及对土壤类型的依赖性等方面分析了它们的潜力和局限性。 大多数方法在试验区范围内能有效证明 θ -R 之间的关系,但方法的迁移性和扩展性还需要更多的实验验证。 其中反射率指数法(除了差分法和导数法)、函数法和模型法在计算上有优势,但它们需要获得先验的土壤信息。 在没有土壤信息的情况下,需要通过使用全部光谱反射率来估算土壤含水量,此时机器学习法更具优势,但是也取决于机器学习法在数据建模中使用的光谱数量的多少,数量过多则会影响计算效率。
欢迎关注公众号:莱森光学,了解更多光谱知识。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑黄昊宇
-
遥感
+关注
关注
0文章
248浏览量
16900 -
高光谱
+关注
关注
0文章
348浏览量
10017
发布评论请先 登录
相关推荐
一种微带谐振式含水量测量传感器设计
一款土壤含水量检测电路相关资料分享
土样含水量快速测定传感技术研究
土壤含水量快速测定仪是什么,它的应用优势是什么
土壤含水量快速测定仪的用途以及使用方法的介绍
土壤含水量测定仪是什么,它的作用又是什么
关于土壤含水量快速测定仪与其他方法的对比
浅谈土壤含水量测定仪在耕地土壤水分测定中的应用
土壤含水量测定仪器的性能和适用范围的介绍
土壤含水量测定仪器的使用方法
土壤含水量测定仪器的性能及技术参数
为什么要测量土壤含水量,土壤水分测量的方法

黄河三角洲土壤含水量状况的高光谱估测与遥感反演





 工商网监
工商网监
评论