 真正的时间延迟和移相器
真正的时间延迟和移相器

本文回顾了两种电子波束成形技术的优缺点:移相器(PS)和真时间延迟(TTD)。它认为这两种方法可以结合在混合波束成形架构中,以提供更好的SWaP-C和相对不那么复杂的系统设计。
介绍
电子扫描阵列(ESA)利用PS或TTD或两者的混合,将求和的光束指向阵列转向角限制内的所需方向。用于锥形的可调衰减器也可以被视为波束成形元件。本文讨论同一ESA中TTD和PS之间的分层方法在何处以及如何有助于缓解一些相控阵设计挑战。
利用基本公式探索可能的方案
瞬时带宽 (IBW) 可以定义为无需调谐即可保持在系统要求设定的目标性能标准内的频带。
TTD 在频率范围内表现出恒定的相位斜率;因此,使用 TTD 而不是 PS 实现的 ESA 没有光束斜视效应。因此,基于TTD的ESA对于高IBW应用更方便。
PS在其工作频率范围内表现出恒定的相位;因此,整个系统中的特定移相器设置会导致不同频率的光束转向角不同。因此,与基于 TTD 的阵列相比,基于 PS 的阵列的 IBW 往往更窄。
这种现象称为光束斜视,可以使用公式1计算,其中Δθ是峰值斜角,θ0是最大光束角,f0是载波频率,f是瞬时信号频率。

使用公式1,我们可以计算出,对于±3 GHz和100 MHz IBW的3 GHz信号,在最坏情况下,即在低频边缘(载波在3 GHz和瞬时信号在2.9 GHz)的Δθ约为1.15°。将波束偏向角更改为 ±60°,将 IBW 更改为 200 MHz,在最坏的情况下会导致大约 8.11° 的波束斜视。很明显,即使在雷达应用中,TTD也是更好的选择。可以说,移相器在ESA中的主导地位可以用以下事实来解释:PS由于其设计简单性和相对于TTD的成本优势而具有更广泛的市场可用性。
如果我们有一个满足系统要求的TTD,那么在同一信号链中使用PS怎么可能合理?
为了进行调查,将检查一个 32 × 32 平方 ESA,天线元件之间具有 d = λ/2 晶格间距 (d),希望在 8 GHz 和 12 GHz 之间工作,扫描角为 ±60°,并假设所有场景都满足 EIRP 标准(图 4)。
在本例中,方位角和仰角的系统波束宽度在视线(θ = 0°)时≅为3.17°,在最大扫描角度(θ = 60°)下为≅6.35°,公式2中给出的均匀线性阵列的半功率波束宽度近似公式,其中N是一个轴上的单元数,θB是同一轴上的波束宽度(以度为单位)。

最大光束角分辨率θRES_MAX当在每个天线元件后面使用 6 位 5.6° LSB PS 时,该阵列在一个维度上约为 ≅ 0.056°,公式 3 约为 0.056°。

通过用于时移转换的公式4,大约需要1.3 ps LSB TTD来取代5.6° LSB PSs,使其在12 GHz时具有0.056°波束角分辨率。

即使在非常小的扫描角度下,波束宽度值也远大于光束角分辨率,并且将PS与TTD放在同一线上以补偿光束角分辨率会给系统带来额外的光束斜视和光束角分辨率下降。实际上,具有更精细TTD分辨率的原因是具有较低的量化旁瓣电平(QSLL),而不是具有更精细的光束角分辨率。随着频率的提高,设计具有所需时间分辨率以满足目标QSLL标准的TTD变得比设计具有所需相位分辨率的PS相对困难;因此,PS可以成为TTD的伴侣,以实现目标QSLL,同时仍具有可接受的光束斜视水平
在同一ESA中实现PS和TTD的另一个原因可能是在设计具有交叉极化能力的系统时减轻光束斜视。交叉极化是通过在天线元件的 V 和 H 馈电之间设置 90° 相移产生的。确保在所需的交叉极化带宽上馈电之间尽可能接近90°的差异对于获得良好的交叉极化隔离以实现健康操作至关重要。由于在频率范围内具有恒定的相位,因此基于 PS 的 ESA 具有宽带交叉极化能力(图 1),而基于 TTD 的 ESA 只能在单个频率下在馈电之间具有 90°(图 2)。图3中的架构可用于应用交叉极化,同时缓解光束斜视。
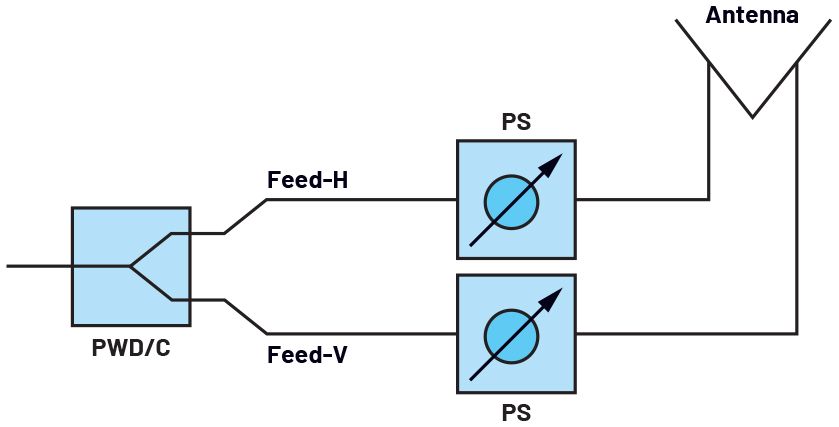
图1.非斜视宽带交叉极化,在天线元件的 V 和 H 馈电后面使用移相器。
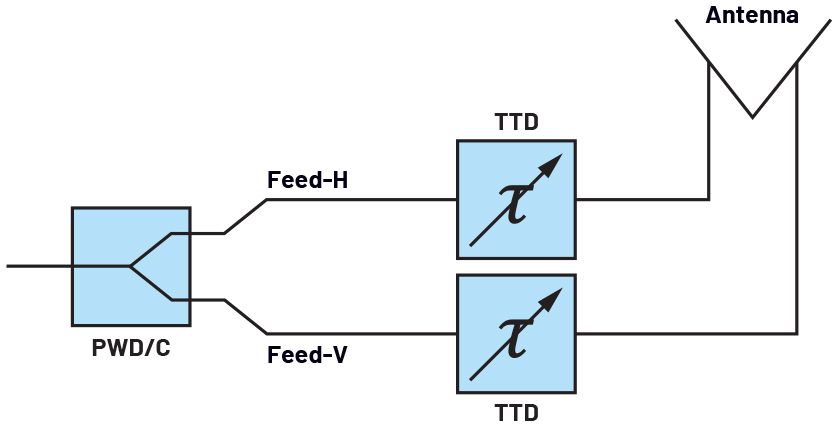
图2.无斜视窄带交叉极化,天线元件的 V 和 H 馈电后有真正的时间延迟。
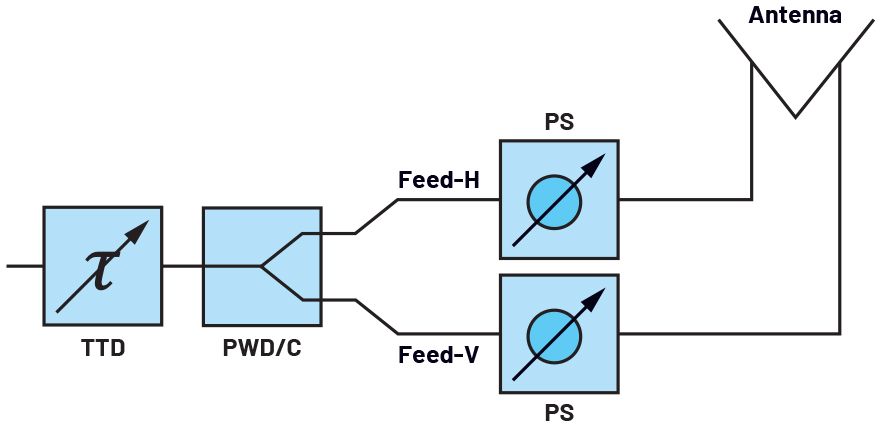
图3.天线元件 V 和 H 馈电后面的公共支腿和移相器具有真正的时间延迟,以优化波束斜视,同时具有宽带交叉极化能力。
TTD 覆盖范围由最大延迟 Δt 设定.MAX在整个阵列的最远元素之间以最低的工作频率。根据公式5,图4中的示例阵列约为2.45 ns。

当人们考虑在每个天线元件后面使用 TTD 而不是不需要交叉极化时,需要考虑几件事。这种覆盖范围意味着非常高的损耗,并且可能难以实现以适应天线间距。在给定的覆盖范围下,具有6位相位PS的分辨率会带来一些设计挑战,并且需要将许多延迟级放入TTD。
如果保持分辨率并降低覆盖范围以减轻这些缺点,那么当超过覆盖范围时,必须回绕到零(通过公式4计算相位等效),但具有讽刺意味的是,光束斜视特征将丢失。
这种快速分析表明,即使不需要交叉极化,每个天线元件上的PS和子阵列公共支腿处的TTD也很有用。图4中的TTD再次需要具有相同的覆盖范围,但与TTD相比,这一次在每个天线元件情况下的分辨率要求有所放松,因为现在它们用于对齐子阵列之间相对较大的时间延迟。
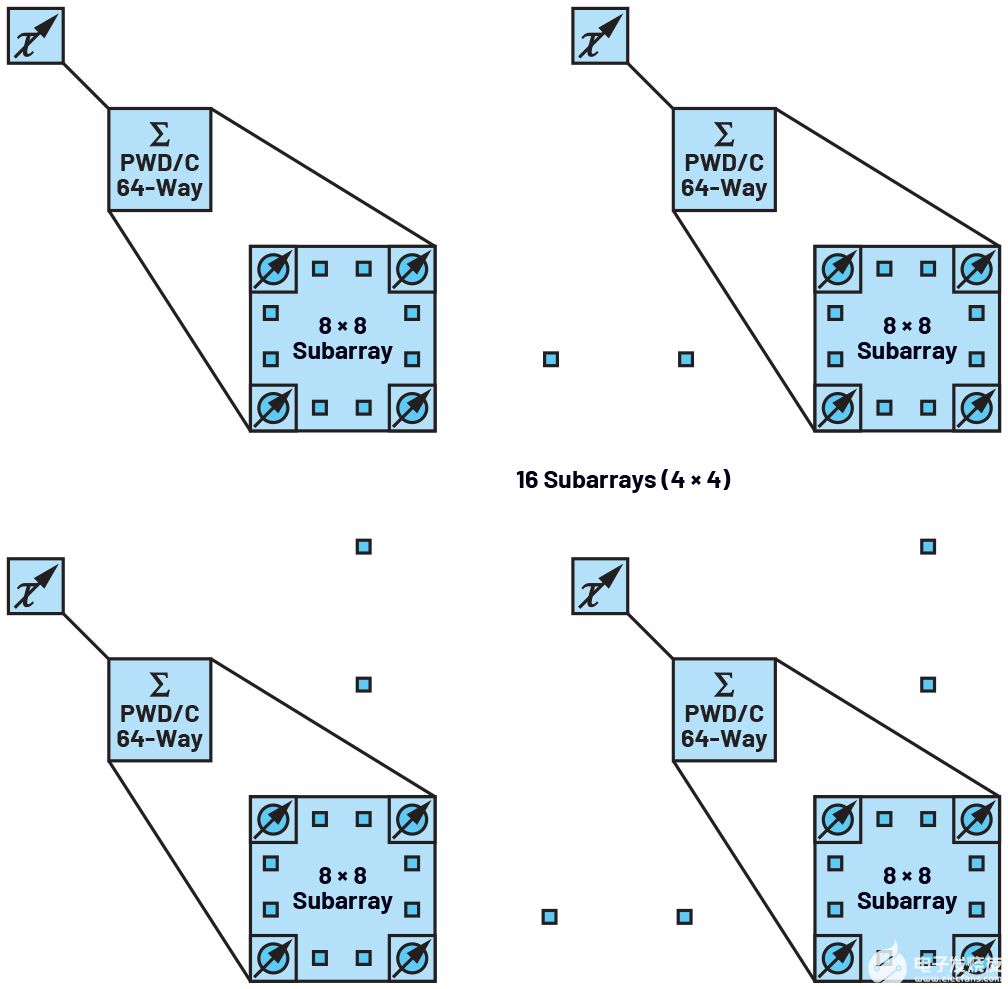
图4.1024(32×32)元素数组划分为16个子数组,由8×8个元素组成。
将相控阵分解为子阵列分区可降低系统的成本和复杂性,但代价是更高的扫描损耗和更低的声束控制分辨率。通过具有更宽的波束宽度,子阵列对光束斜视效应的容忍度更高,因为它们具有更宽的波束宽度。很明显,波束斜视和波束宽度目标是考虑子阵列大小的重要指标。
结论
宽带无斜视操作需要每个天线元件后面的真实时间延迟,宽带交叉极化操作需要每个天线元件的每个 V 和 H 馈电后面的移相器。
如果不需要交叉极化并且针对完全无斜视操作,则应遵循基于TTD的设计。随着频率的增加,添加PS可能有助于实现QSLL目标,以换取妥协的无斜视操作。
如果需要交叉极化,则天线的每个极化馈电后应遵循单独但相同的 PS,其工作带宽上方的 90° 差很小。在PS的共同腿上添加TTD可能有助于减轻光束斜视。
无论是否需要交叉极化,在天线元件后面安装PS的子阵列架构,然后在子阵列的公共支腿处安装TTD,都可能是一种经济高效的解决方案。请注意,TTD功能可以在数字域中实现,所有数字设计都可以消除TTD和PS,但代价是更高的系统成本。
在深入研究ESA设计的无数挑战之前,了解使用TTD或PS与串联使用它们之间的差异是规划系统级波束成形架构的重要组成部分,该架构通过更好的SWaP-C满足系统要求。
审核编辑:郭婷
-
天线
+关注
关注
71文章
3413浏览量
144320 -
移相器
+关注
关注
4文章
124浏览量
34990
发布评论请先 登录
HMC910LC4B宽带模拟时间延迟器:特性、应用与设计指南
HMC877LC3宽带时间延迟与移相器:特性、应用与设计要点
可编程数字式移相器的应用介绍,数字式移相器,可编程移相器
网络延迟具体是怎样影响实时波形查看的?
FPGA中数据延迟方案介绍

LM555QML 定时器芯片技术文档总结

探头的延时介绍
从 NuMicro® NUC505 MCU 线路输入到耳机输出的音频源的延迟时间是多少?
FX10、FX20 FlagA 时间延迟是固定的嘛?
5g移相器 详析模拟与数字微波移相器的工作原理及特性 雷达移相器

详析模拟与数字微波移相器的工作原理及特性
如何自动测量CAN收发器的延迟时间?




评论