 电磁智能车原理
电磁智能车原理
电磁智能车原理
随着计算机、微电子等技术的快速发展,智能化技术的开发越来越成熟,应用的范围也得到了极大的扩展。目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车以及在智能车的基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。世界上许多国家都在积极进行智能车辆的研究和开发设计,其中如何控制智能车在跑道上跑的更快更稳定一直是一个研究的重要课题。
系统总体方案设计
电磁导引小车总体结构如图2所示,主要由主控模块、传感器模块、底层控制模块、电源管理模块和人机交互模块等几部分组成。主控模块以MC9S12XS128单片机为核心控制部件,主要负责完成各种传感器信息的采集、小车的赛道识别、速度规划与运动控制,以及必要的人机交互功能;传感器模块主要负责感知外部世界的环境信息与小车自身的状态信息,如利用电磁传感器获取赛道信息、干簧管检测起始线位置、光电编码器检测车模速度等;底层控制模块负责执行主控模块发出的PWM运动控制指令,实现小车的前进与转向;电源管理模块采用7.2 V/2 000 mAh的镍镉电池供电,并通过DC-DC稳压转换模块向系统中各功能模块提供所需的电源电压;人机交互模块主要包括拨码开关、LED灯、蜂鸣器、键盘、液晶显示器、SD卡、无线通信模块和BDM调试模块等,以方便用户调试和监控。
2软件系统总体框架
系统软件如图3所示,其核心部分主要包括传感器数据获取、赛道提取、舵机控制、电机控制等。其中赛道提取是软件设计的重要环节,其主要任务是根据电感线圈检测信号确定当前赛道的类型和车—路关系,为小车的方向控制和速度控制提供依据。而舵机控制就是指赛车的方向控制,它以赛车车体为参考系,通过小车与赛道中心线的位置偏差来设计增量式PD控制器,以此得到控制舵机的PWM波占空比;舵机驱动车模前轮转向,使赛车中心线始终逼近电磁导引线。电机控制就是指赛车的速度控制,其期望速度来源于速度规划环节,实际转速采用光电编码器检测,通过设计增量式的PI控制和BANGBANG控制相结合的方法实现对赛车速度的闭环控制。
3基于分段拟合与动态加权的赛道位置解算
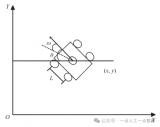
综合考虑电磁组中的小S弯、大S弯、十字交叉、大回环、坡道,以及直角弯等各种复杂赛道元素[5],本文提出了一种基于分段拟合与动态加权的赛道位置解算方法。该方法采用“四横两斜”的混合线圈排布方案,具体如图4所示。图中,4个水平线圈1~4分别排布在车模前上方左右对称的-10 cm、-5 cm、5 cm、10 cm处;最外侧对称排布着倾斜角度为45°的线圈5和线圈6;各线圈检测到的感应电动势分别用E1、E2、E3、E4、E5、E6表示。
如图5所示,基于分段拟合与动态加权的赛道位置解算方法的基本思想为:首先采集6个线圈的感应电动势(E1~E6)并对其进行比较,当E2或E3最大时,表明小车与赛道的偏离距离d∈[-10 cm,10 cm]区间,此时将采用四水平线圈检测的感应电动势E1~E4进行三次多项式拟合,并通过求极值的方法来解算赛道偏移位置d1;而当E1最大时,表明小车与赛道的偏离距离d∈[-20 cm,-10 cm)区间,此时将利用感应电动势E1,通过离线拟合的线性函数来解算赛道偏移位置d1;同理,当E4最大时,表明小车与赛道的偏离距离d∈(10 cm,20 cm]区间,此时也将利用感应电动势E4,通过离线拟合的线性函数来解算赛道偏移位置d1;与此同时,还要根据两侧内八字斜电感的感应电动势E5和E6,利用差值法来解算赛道偏移位置,并将其记为d2;最后将d1与d2加权求和,即可得到最终的赛道偏移位置为:
QQ图片20161215104923.png
其中,α为权重系数,α∈[0,1]。α的计算公式为:
QQ图片20161215104927.png
式中,T为阈值,其值需根据实际制作的车模以及赛道的复杂程度进行确定。为了兼顾直角弯、大回环等特殊赛道元素,经过反复试验,本文取T=160。
4实车试验结果及分析
为了验证本文工作的有效性,笔者搭建了一台实验用电磁小车,并进行了大量的实车测试。
试验结果表明,当小车在直道上行驶时,由于线圈2和线圈3距离导引线较近,感应电动势E2+E3大约在170以上,此时主要由三次多项式拟合来解算赛道位置偏差;而当小车在弯道行驶时,由于线圈2和线圈3偏离导引线,偏离程度越大其感应电动势之和越小,相应地α值越小,此时三次多项式拟合的权重逐渐减小,双斜电感差值法的权重逐渐加大。由于双斜电感差值法对弯道的检测更为敏感,所以增加了转弯的灵敏性。特别地,当小车行驶至直角弯时,中间两个线圈的感应电动势之和连续递减,相应地其权重也线性递减,很好地解决了直角弯的连续性问题。图6给出了小车在经过直角弯的过程中,采用未加权求和进行赛道位置解算与采用加权求和进行赛道位置解算的直角弯位置偏差变化对比图。由图6可知,采用加权算法求得的直角位置偏差连续性增强,有效地减弱了由直道进入直角弯的突变性,从而可以利用位置以及位置偏差的变化量判断出赛道类型,据此进行速度规划和运动控制。另外还可以避免弯道与直角判断条件的冲突,增强了算法的环境适应性。
5结论
本文以电磁导引智能车为研究对象,介绍了系统的总体结构和软件框架。针对复杂赛道元素识别问题,提出了一种基于分段拟合建模与动态加权融合的赛道位置解算方法。试验结果表明,该方法具有良好的环境适应性,以此制作的电磁小车可以针对不同路径快速稳定地运行。
-
电磁智能小车
+关注
关注
0文章
2浏览量
1416
发布评论请先 登录
相关推荐
ADAYO华阳与华为智能车载光业务合作签约

复杂环境下多无人智能车辆协同调控
智能车载充气泵方案芯片DSH38M87
20.0-电磁杆的组装和实物介绍“这个是就是你想要的“-智能车电磁组 电磁循迹小车
20.3-使用两个通道进行电磁循迹 智能车竞赛 电磁杆原理图 电磁循迹小车 STM32电磁小车 电磁循迹算法

20.2-电磁杆在磁轨道的测试 零基础入门智能车竞赛 STM32电磁小车

vivo智能车载正式上线视频类应用
什么是智能车间和智能工厂 它们有什么区别
小米之后,做手机的魅族也造车了 搭载FlymeAuto智能车机系统
黑芝麻智能与一汽红旗达成武当系列C1200家族智能车控项目合作

乐华工位机MES助力智能车间
ROS系统的智能车开发-基于米尔芯驰MYD-JD9X开发板







 工商网监
工商网监
评论