 电磁智能车原理
电磁智能车原理
电磁智能车原理
我们可以看到很多的一些案例,比如电子竞赛中已经出现电磁智能车的设计案例,那么电磁智能车原理的是什么?
电磁智能车原理
电磁智能车是基于电磁导引的自主寻迹智能小车系统,电磁智能车包括环境感知、规划决策和运动控制三大部分,涵盖了自动控制、模式识别、传感技术、电子、计算机、机械、能源等多个学科知识。
电磁智能车想要正常行驶在赛道上,必定是需要实时根据赛道的状态来调整车身姿态的,那么电磁智能车是怎么样获取到赛道信息的?在赛道正中间会有一条磁感线,用来产生交变电磁信号。电磁智能车通过电感即可获得到赛道信息。
导体切割磁感线会产生感应电动势,工字电感内部的导线切割信号线产生的磁场,在电感引脚就会有感应电动势。电感距离磁场越近,产生的感应电动势越大,距离越远,产生的感应电动势越小。当然在实际中会有各种不同的算法来应对。
电磁智能车通过感应赛道中心导线产生的交变磁场进行路径检测,要电磁智能车能够通过传感器信号自动识别当前所处位置以及距离赛道中心的位置。通过传感器采集信号传给单片机,通过编程实现电磁智能车位置的叛别以及控制小车采取相应的动作,前进或者后退或者转弯。
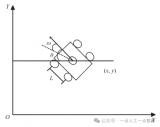
电感排布方案是制约电磁智能车竞赛成绩的关键因素之一,比如在全国大学生飞思卡尔杯智能汽车竞赛中,有选手用到的电磁智能车方案是这样的,根据毕奥 萨法尔定律和法拉第电磁感应定律,在车模前上方水平排布的线圈,其检测的感应电动势经放大和检波后,可得到一个直流信号E与水平距离x的关系,据此可解算出小车当前的位置偏差。然而采用单水平电感检测只能反映位置偏差绝对值的大小,无法分辨偏离方向。为了弥补单电感无法分辨左右的问题,可采用双水平线圈检测方案,即在车模前上方高度为h的水平方向对称排布两个相距L的水平线圈;并对两线圈的感应电动势作差值(简称差值法),据此可判断小车的偏离方向和位置偏差。
此外AI赋能也已经落地实现,电磁智能车部署实施AI算法被更多提及和验证。
而且在机器人智能化、装备智能化、智能无人系统技术的升级普及下,电磁智能车正在被更多人关注。在《国家自然科学基金“十四五”发展规划》中,就提出围绕复杂结构与介质对电磁场和声场的调控这一科学前沿与重大需求,重点研究具有特定时空序构的电磁/声超构材料及超构表面,电磁/声人工体系中的单向操控,拓扑电磁/声学体系,设计多功能、可重构/调谐的新型电磁/声人工器件,为发现电磁场、声场调控新机理,实现新型光、声器件的研制和应用打下物理基础。(综合整理)
-
磁场
+关注
关注
3文章
853浏览量
24182 -
电感
+关注
关注
54文章
6110浏览量
102144 -
电磁
+关注
关注
15文章
1074浏览量
51710 -
智能小车
+关注
关注
86文章
549浏览量
81654 -
感应电动势
+关注
关注
0文章
136浏览量
5669
发布评论请先 登录
相关推荐
复杂环境下多无人智能车辆协同调控
20.0-电磁杆的组装和实物介绍“这个是就是你想要的“-智能车电磁组 电磁循迹小车
20.3-使用两个通道进行电磁循迹 智能车竞赛 电磁杆原理图 电磁循迹小车 STM32电磁小车 电磁循迹算法

20.2-电磁杆在磁轨道的测试 零基础入门智能车竞赛 STM32电磁小车

vivo智能车载正式上线视频类应用
什么是智能车间和智能工厂 它们有什么区别
小米之后,做手机的魅族也造车了 搭载FlymeAuto智能车机系统
黑芝麻智能与一汽红旗达成武当系列C1200家族智能车控项目合作

乐华工位机MES助力智能车间
ROS系统的智能车开发-基于米尔芯驰MYD-JD9X开发板

芯驰科技全场景智能车芯赋能智慧出行
智能车中电磁归一化该怎么处理
智能车电磁采集滤波方法
智能车ROS与STM32串口通信代码
智能车控制器功能有哪些





 工商网监
工商网监
评论