 DataParallel里为什么会显存不均匀以及如何解决
DataParallel里为什么会显存不均匀以及如何解决
鉴于网上此类教程有不少模糊不清,对原理不得其法,代码也难跑通,故而花了几天细究了一下相关原理和实现,欢迎批评指正!
关于此部分的代码,可以去https://github.com/sherlcok314159/dl-tools查看
「在开始前,我需要特别致谢一下一位挚友,他送了我双显卡的机器来赞助我做个人研究,否则多卡的相关实验就得付费在云平台上跑了,感谢好朋友一路以来的支持,这份恩情值得一辈子铭记!这篇文章作为礼物赠与挚友。」
Why Parallel
我们在两种情况下进行并行化训练[1]:
「模型一张卡放不下」:我们需要将模型不同的结构放置到不同的GPU上运行,这种情况叫ModelParallel(MP)
「一张卡的batch size(bs)过小」:有些时候数据的最大长度调的比较高(e.g., 512),可用的bs就很小,较小的bs会导致收敛不稳定,因而将数据分发到多个GPU上进行并行训练,这种情况叫DataParallel(DP)。当然,DP肯定还可以加速训练,常见于大模型的训练中
这里只讲一下DP在pytorch中的原理和相关实现,即DataParallel和DistributedParallel
Data Parallel
实现原理
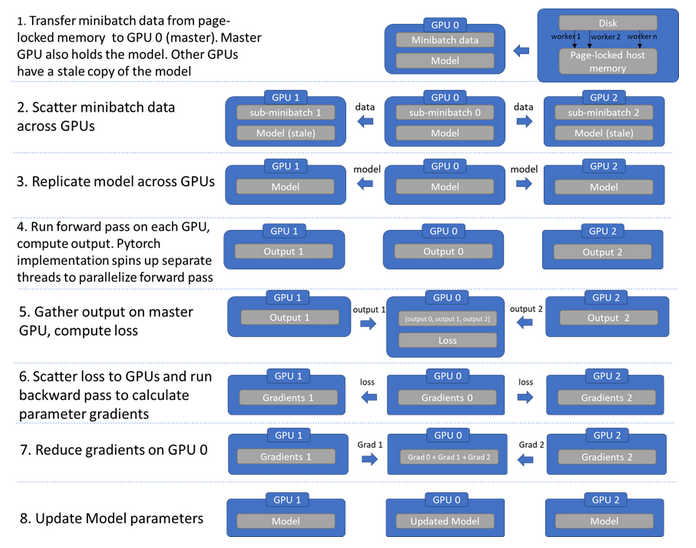
实现就是循环往复一个过程:数据分发,模型复制,各自前向传播,汇聚输出,计算损失,梯度回传,梯度汇聚更新,可以参见下图[2]:
pytorch中部分关键源码[3]截取如下:
defdata_parallel( module, input, device_ids, output_device=None ): ifnotdevice_ids: returnmodule(input) ifoutput_deviceisNone: output_device=device_ids[0] #复制模型 replicas=nn.parallel.replicate(module,device_ids) #拆分数据 inputs=nn.parallel.scatter(input,device_ids) replicas=replicas[:len(inputs)] #各自前向传播 outputs=nn.parallel.parallel_apply(replicas,inputs) #汇聚输出 returnnn.parallel.gather(outputs,output_device)
代码使用
因为运行时会将数据平均拆分到GPU上,所以我们准备数据的时候, batch size = per_gpu_batch_size * n_gpus
同时,需要注意主GPU需要进行汇聚等操作,因而需要比单卡运行时多留出一些空间
importtorch.nnasnn #device_ids默认所有可使用的设备 #output_device默认cuda:0 net=nn.DataParallel(model,device_ids=[0,1,2], output_device=None,dim=0) #input_varcanbeonanydevice,includingCPU output=net(input_var)
接下来看个更详细的例子[4],需要注意的是被DP包裹之后涉及到模型相关的,需要调用DP.module,比如加载模型
classModel(nn.Module): #Ourmodel def__init__(self,input_size,output_size): super(Model,self).__init__() #forconvenience self.fc=nn.Linear(input_size,output_size) defforward(self,input): output=self.fc(input) print(" InModel:inputsize",input.size(), "outputsize",output.size()) returnoutput bs,input_size,output_size=6,8,10 #defineinputs inputs=torch.randn((bs,input_size)).cuda() model=Model(input_size,output_size) iftorch.cuda.device_count()>1: print("Let'suse",torch.cuda.device_count(),"GPUs!") #dim=0[6,xxx]->[2,...],[2,...],[2,...]on3GPUs model=nn.DataParallel(model) #先DataParallel,再cuda model=model.cuda() outputs=model(inputs) print("Outside:inputsize",inputs.size(), "output_size",outputs.size()) #assume2GPUSareavailable #Let'suse2GPUs! #InModel:inputsizetorch.Size([3,8])outputsizetorch.Size([3,10]) #InModel:inputsizetorch.Size([3,8])outputsizetorch.Size([3,10]) #Outside:inputsizetorch.Size([6,8])output_sizetorch.Size([6,10]) #savethemodel torch.save(model.module.state_dict(),PATH) #loadagain model.module.load_state_dict(torch.load(PATH)) #doanythingyouwant
如果经常使用huggingface,这里有两个误区需要小心:
#dataparallelobjecthasnosave_pretrained model=xxx.from_pretrained(PATH) model=nn.DataParallel(model).cuda() model.save_pretrained(NEW_PATH)#error #因为model被DPwrap了,得先取出模型# model.module.save_pretrained(NEW_PATH)
#HF实现貌似是返回N个loss(N为GPU数量) #然后对N个loss取mean outputs=model(**inputs) loss,logits=outputs.loss,outputs.logits loss=loss.mean() loss.backward() #返回的logits是汇聚后的 #HF实现和我们手动算loss有细微差异 #手动算略好于HF loss2=loss_fct(logits,labels) assertloss!=loss2 True
显存不均匀
了解前面的原理后,就会明白为什么会显存不均匀。因为GPU0比其他GPU多了汇聚的工作,得留一些显存,而其他GPU显然是不需要的。那么,解决方案就是让其他GPU的batch size开大点,GPU0维持原状,即不按照默认实现的平分数据
首先我们继承原来的DataParallel(此处参考[5])),这里我们给定第一个GPU的bs就可以,这个是实际的bs而不是乘上梯度后的。假如你想要总的bs为64,梯度累积为2,一共2张GPU,而一张最多只能18,那么保险一点GPU0设置为14,GPU1是18,也就是说你DataLoader每个batch大小是32,gpu0_bsz=14
classBalancedDataParallel(DataParallel): def__init__(self,gpu0_bsz,*args,**kwargs): self.gpu0_bsz=gpu0_bsz super().__init__(*args,**kwargs)
核心代码就在于我们重新分配chunk_sizes,实现思路就是将总的减去第一个GPU的再除以剩下的设备,源码的话有些死板,用的时候不妨参考我的[6]
defscatter(self,inputs,kwargs,device_ids):
#不同于源码,获取batchsize更加灵活
#支持只有kwargs的情况,如model(**inputs)
iflen(inputs)>0:
bsz=inputs[0].size(self.dim)
elifkwargs:
bsz=list(kwargs.values())[0].size(self.dim)
else:
raiseValueError("Youmustpassinputstothemodel!")
num_dev=len(self.device_ids)
gpu0_bsz=self.gpu0_bsz
#除第一块之外每块GPU的bsz
bsz_unit=(bsz-gpu0_bsz)//(num_dev-1)
ifgpu0_bsz< bsz_unit:
# adapt the chunk sizes
chunk_sizes = [gpu0_bsz] + [bsz_unit] * (num_dev - 1)
delta = bsz - sum(chunk_sizes)
# 补足偏移量
# 会有显存溢出的风险,因而最好给定的bsz是可以整除的
# e.g., 总的=52 =>bsz_0=16,bsz_1=bsz_2=18
#总的=53=>bsz_0=16,bsz_1=19,bsz_2=18
foriinrange(delta):
chunk_sizes[i+1]+=1
ifgpu0_bsz==0:
chunk_sizes=chunk_sizes[1:]
else:
returnsuper().scatter(inputs,kwargs,device_ids)
returnscatter_kwargs(inputs,kwargs,device_ids,chunk_sizes,dim=self.dim)
优缺点
优点:便于操作,理解简单
缺点:GPU分配不均匀;每次更新完都得销毁「线程」(运行程序后会有一个进程,一个进程可以有很多个线程)重新复制模型,因而速度慢
审核编辑:汤梓红
-
gpu
+关注
关注
28文章
4889浏览量
130478 -
显卡
+关注
关注
16文章
2497浏览量
69077 -
pytorch
+关注
关注
2文章
809浏览量
13710
原文标题:DataParallel里为什么会显存不均匀以及如何解决
文章出处:【微信号:zenRRan,微信公众号:深度学习自然语言处理】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
不均匀性的定义 PPT学习资料
矩阵式LED的显示亮度不均匀
在同步设计中使用占空比不均匀的时钟是否可行
VHDL小源程序平均频率输出不均匀
基于不均匀密度的自动聚类算法
照度不均匀图像的自动Gamma灰度校正
为什么数码管亮度不均匀?
锡膏点胶时拉丝不均匀,如何解决?






 工商网监
工商网监
评论