 下一代隔离式Σ-Δ调制器如何改善系统级电流测量
下一代隔离式Σ-Δ调制器如何改善系统级电流测量
本文将首先介绍共模瞬态抗扰度(CMTI)规范及其在系统中的重要性。我们将讨论一种新的隔离式Σ-Δ调制器系列及其性能,以及它如何提高和促进系统电流测量精度,特别是失调误差和失调误差漂移。最后,将介绍推荐的电路解决方案。
隔离式调制器广泛用于需要高精度电流测量和电气隔离的电机/逆变器。随着电机/逆变器系统的高集成度和高效率革命,SiC和GaN FET因其更小的尺寸、更高的开关频率和更低的散热器优势而开始取代MOSFET和IGBT。但是,隔离元件需要高CMTI能力。还需要更高精度的电流测量。下一代隔离调制器大大提高了CMTI能力,并提高了精度本身。
什么是共模瞬态抗扰度?
共模瞬态抗扰度指定跨隔离边界施加的瞬态脉冲的上升和下降速率,超过该速率,时钟或数据将损坏。记录脉冲的变化率和绝对共模电压(VCM)。
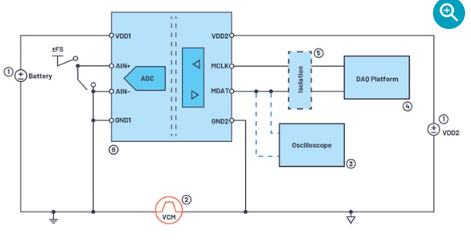
新型隔离调制器在静态和动态CMTI条件下进行了测试。静态测试检测来自设备的单位错误。动态测试监测滤波后的数据输出,以了解随机应用CMTI脉冲的噪声性能变化。详细的测试框图如图1所示。
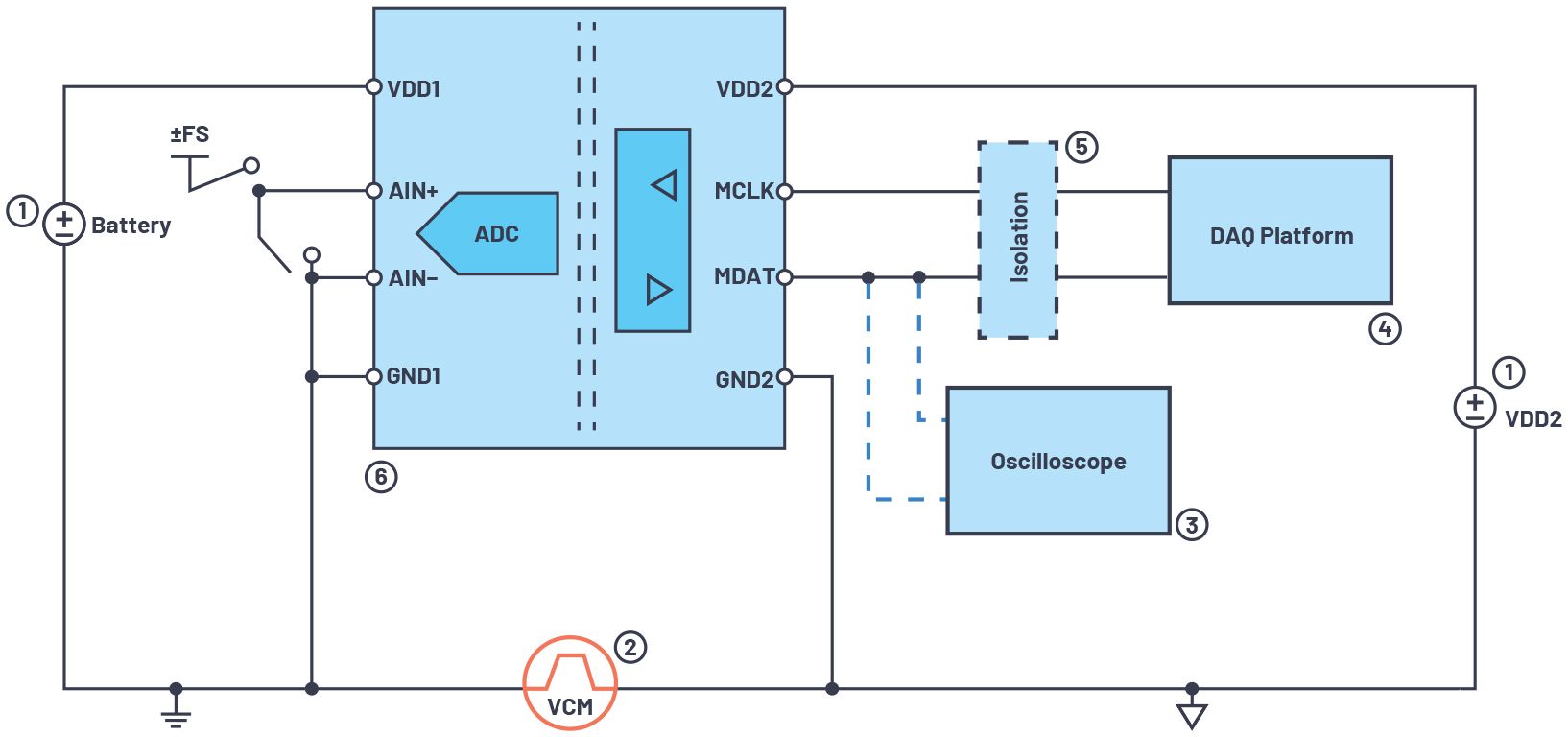
图1.简化的 CMTI 测试框图。
CMTI很重要,因为高压摆率(高频)瞬变会破坏跨越隔离栅的数据传输。了解和测量对这些瞬变的敏感性至关重要。ADI公司的测试方法基于IEC 60747-17标准,该标准涉及磁耦合器的共模瞬变抗扰度(CMTI)测量方法。
如何在工作台上表征隔离调制器的CMTI
简化的CMTI测试平台包括图1所示的以下项目:
用于 VDD1/VDD2 的电池电源。
高共电压脉冲发生器。
用于监控数据的示波器。
用于分析数据的数据采集平台和用于隔离调制器的256抽取sinc3滤波器。
隔离模块(通常使用光隔离)。
隔离式调制器。
对于静态和动态CMTI测试,使用相同的平台,只是输入信号不同。该平台还可用于测试其他隔离产品的CMTI性能。对于隔离式调制器,一位流数据将被抽取和滤波,然后传输到电机控制系统中的控制环路,因此动态CMTI测试性能将更加全面和有用。图2和图3显示了不同CMTI电平下的时域和频域CMTI动态测试性能。从图2可以看出,当为同一隔离调制器添加更高的VCM瞬态信号时,杂散会变大。当VCM瞬态信号超过隔离调制器规格时,时域中会出现非常大的杂散(如图2c所示)。这在电机控制系统中使用时会产生严重后果,导致较大的转矩脉动。
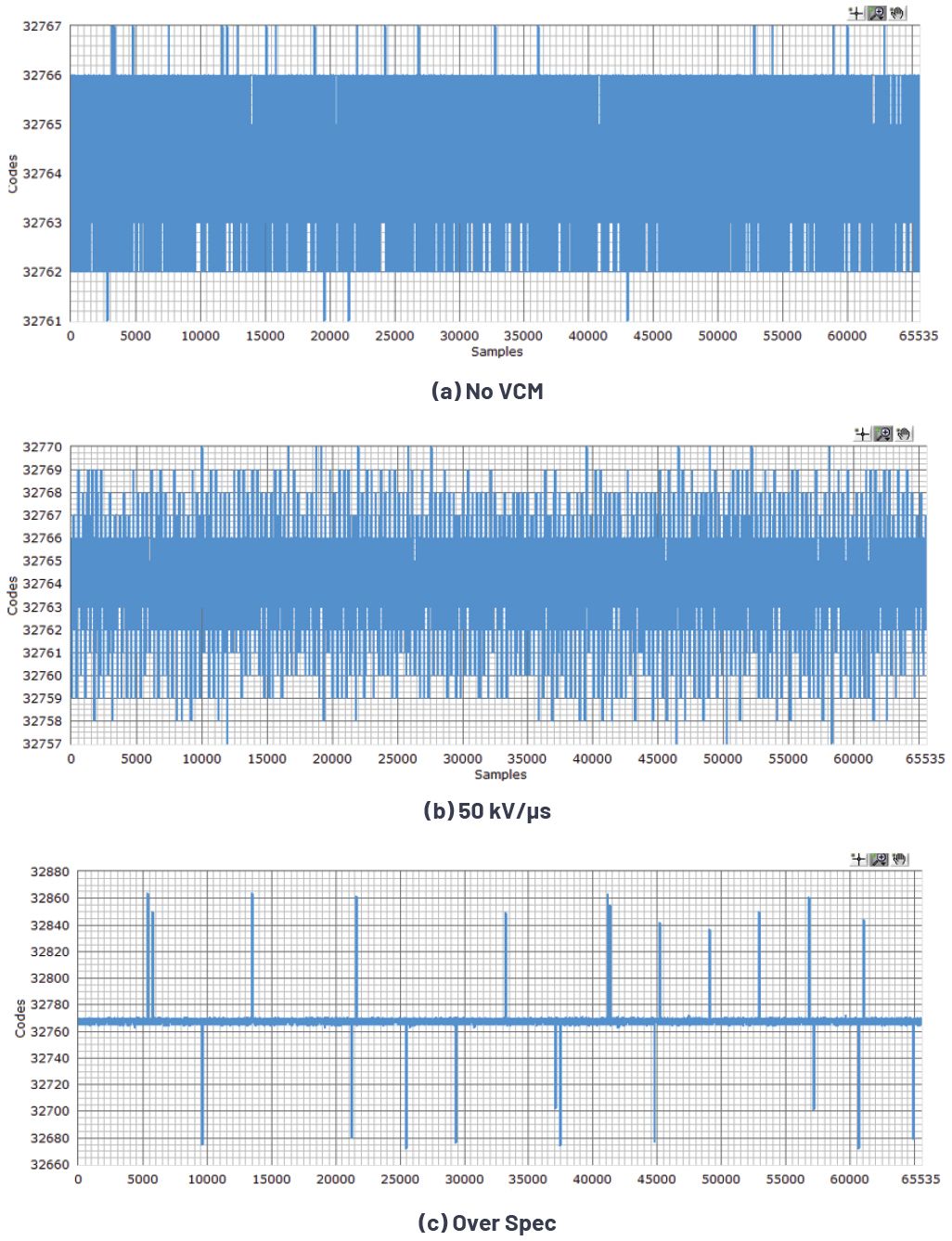
图2.时域动态 CMTI 性能。
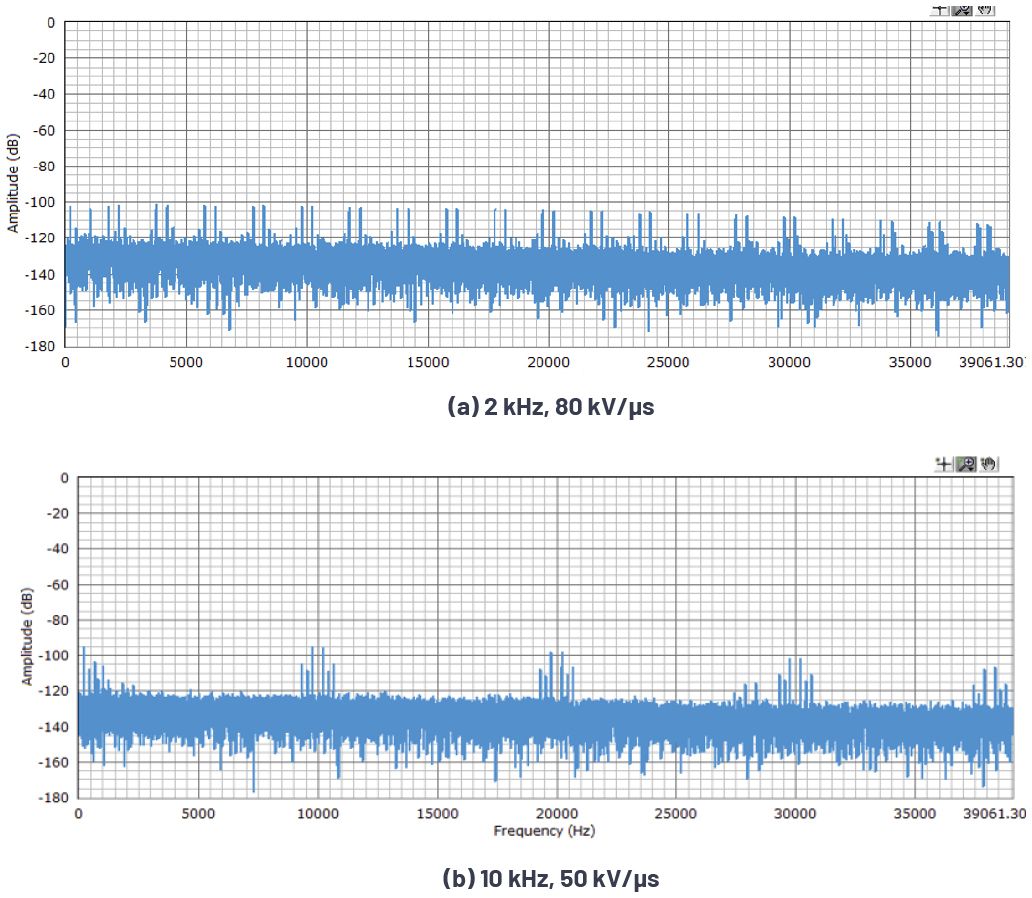
图3.频域动态CMTI性能。
图3显示了不同频率瞬变下的FFT域性能(这意味着通过改变瞬态周期来保持VCM瞬态电平)。图3中的结果表明,谐波与瞬态频率高度相关。因此,隔离调制器的CMTI能力越高,FFT分析中的噪声水平就越低。与上一代隔离式调制器相比,下一代ADuM770x器件将CMTI能力从25 kV/μs提高到150 kV/μs,从而大大提高了系统瞬态抗扰度,详见表1中的比较数据。
| 关键规格 | ADuM7701/ ADuM7703 | ADuM7702/ ADuM7704 | AD7403 | AD7401 | |
|
隔离 |
工作电压( VPK) |
1270 | 1270 | 1250 |
891 |
|
CMTI (千伏/微秒) (最小值) |
150 | 150 | 25 |
25 |
|
|
性能 |
失调误差 (mV最大值) |
±0.18 | ±0.18 | ±0.75 |
±0.6 |
|
50 mV 时的失调漂移 (μV/°C 最大值) |
— |
±0.25(16 针) ±0.6(8 针) |
— | — | |
|
250 mV 时的失调漂移 (μV/°C 最大值) |
±0.6 | — | 3.8 | 3.5 | |
|
增益误差 (%FSR 最大值) |
±0.2 | ±0.2 | ±1.2 | ±0.3 | |
|
50 mV 时的增益漂移 (ppm/°C) |
— |
±15.6(典型值) ±31.3(最大值) |
— | — | |
|
250 mV 时的增益漂移 (ppm/°C) |
±12.5(典型值) ±28(最大值) |
— |
65(典型值) 95(最大值) |
36(典型值) | |
| 50 mV 时的 ENOB(位) | — |
14.2(典型值) 13.1(最小值) |
— | — | |
| ENOB(位)在 250 mV 时 |
14(典型值) 13.3(最小值) |
— |
14.2(典型值) 13.1(最小值) |
11.5米(典型值) | |
|
集成 |
线性分布器 |
不 | 是的 | 不 |
不 |
| 包 | 8 针和 16 针 | 8 针和 16 针 | 8 针和 16 针 | 16 针 | |
系统级补偿和校准技术
在电机控制或逆变器系统中,电流数据的精度越高,系统就越稳定和高效。失调和增益误差是ADC中直流误差的常见来源。图4显示了失调和增益误差如何影响ADC传递函数。这些误差可能导致系统产生转矩脉动或速度脉动。为了限制误差对大多数系统的影响,可以在环境温度下校准这些误差。
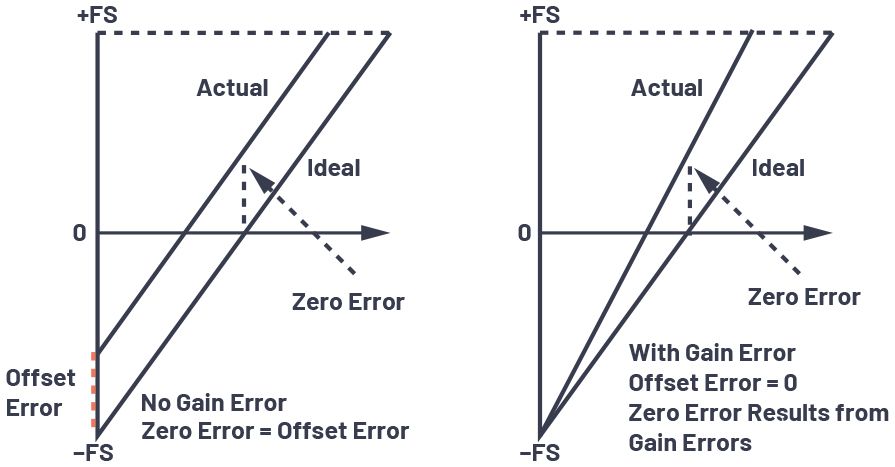
图4.ADC传递函数的失调和增益误差。
否则,失调漂移和整个温度范围内的增益误差是一个问题,因为它们更难补偿。在系统温度已知的情况下,对于具有线性和可预测漂移曲线的转换器,可以通过在曲线上增加补偿因子使失调漂移曲线尽可能平坦来实现失调和增益误差漂移的补偿(尽管昂贵且耗时)。应用笔记AN-1377中描述了这种详细的补偿方法。该方法可将AD7403/AD7405数据手册中规定的失调漂移系数降低多达30%,增益误差漂移降低90%,并且当您想要改善系统级失调和增益误差漂移时,该方法可应用于任何其他转换器元件。
如何使用切碎技术
或者,对于系统设计人员来说,称为斩波技术的设计更高效、更方便,并且斩波功能也可以与硅本身很好地集成,以最大限度地减少失调和增益误差漂移。斩波方案如图5所示,其中在ADC上实现的解决方案是斩波整个模拟信号链,以消除任何失调和低频误差。
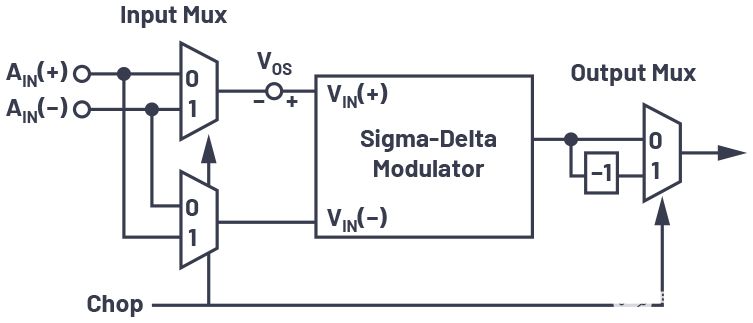
图5.
调制器的差分输入在输入多路复用器上交替反相(或斩波),并且对斩波的每一相执行ADC转换(将多路复用器切换到“0”或“1”状态)。调制器斩波在输出多路复用器中反转,然后输出信号传递到数字滤波器。
如果Σ-Δ调制器中的失调表示为V操作系统,则输出为 (A在(+) − A在(−)) + V操作系统当 chop 为 0 且输出为 −[(A在(−) − A在(+))4 Ω操作系统]当印章为1时。误差电压,V操作系统,通过在数字滤波器中对这两个结果求平均值来删除,给出(A在(+) − A在(−)),等于没有任何失调项的差分输入电压。
最新的隔离调制器通过优化内部模拟设计和使用最新的斩波技术,改善了失调和增益误差相关的性能,从而极大地简化了系统设计并缩短了校准时间。最新的ADuM770x器件具有最高的隔离电平和最佳的ADC性能。还提供LDO版本,可以简化系统的电源设计。
推荐的电路和布局设计
电机系统的典型电流测量电路如图6所示。虽然系统中需要三个相电流测量电路,但框图中只显示了一个。其他两个相电流测量电路相似,用蓝色虚线表示。从相电流测量电路中,我们可以看到一侧的R。分流电阻连接到ADuM770x-8的输入端。另一侧连接到高压FET(可以是IGBT或MOSFET)和电机。过压、欠压或其他电压不稳定情况总是在高压FET改变状态时发生。相应地,R的电压波动分流电阻将传递到ADuM770x-8,相关数据将通过DATA引脚接收。布局和系统隔离设计可以改善或降低电压不稳定条件,从而影响相电流测量精度。
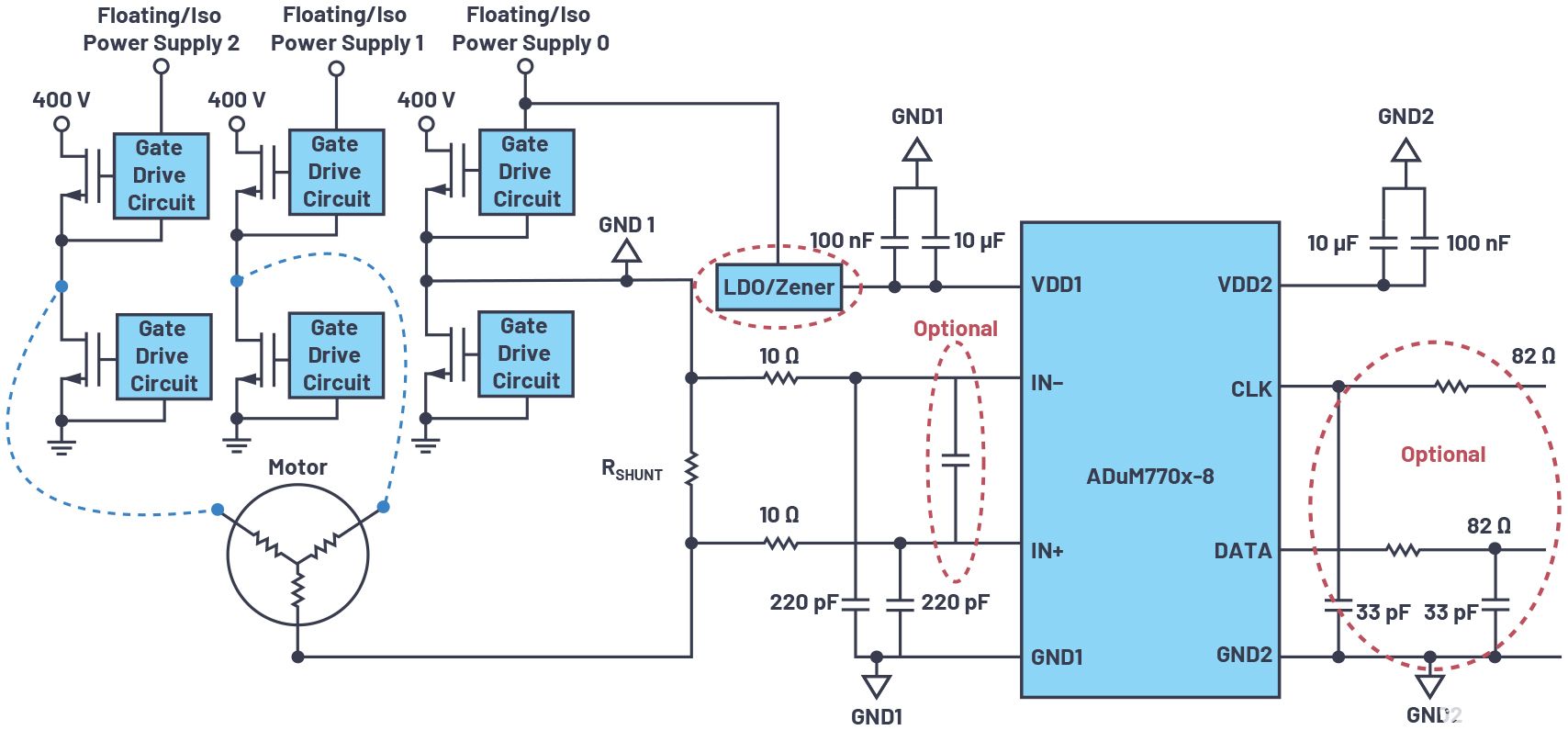
图6.电机系统中的典型电流测量电路。
如图6所示,推荐的电路设置为:
对于VDD1/VDD2去耦,需要10 μF/100 nF电容,并应尽可能靠近相应的引脚放置。
需要一个10 Ω/220 pF RC滤波器。
建议使用可选的差分电容,以减少分流器的噪声影响。将电容器靠近 IN+/IN– 引脚放置(建议采用 0603 封装)。
当数字输出线路较长时,建议使用82 Ω/33 pF RC滤波器。为了获得良好的性能,应考虑使用屏蔽双绞线电缆。
为了达到最佳性能,良好的布局也是必要的。推荐的布局如图 7 所示。建议采用从分流电阻器到IN+/IN–输入引脚的差分对布线,以增强共模抑制能力。10 Ω/220 pF滤波器应尽可能靠近IN+/IN–输入引脚放置。10 μF/100 nF去耦电容应靠近VDD1/VDD2电源引脚放置。建议将部分接地层GND1放置在输入相关电路下方,以提高信号稳定性。需要独立的GND1线(以紫色显示,与差分对布线线并联),从分流电阻到ADuM770x-8 GND引脚进行星形连接,以降低电源电流波动效应。
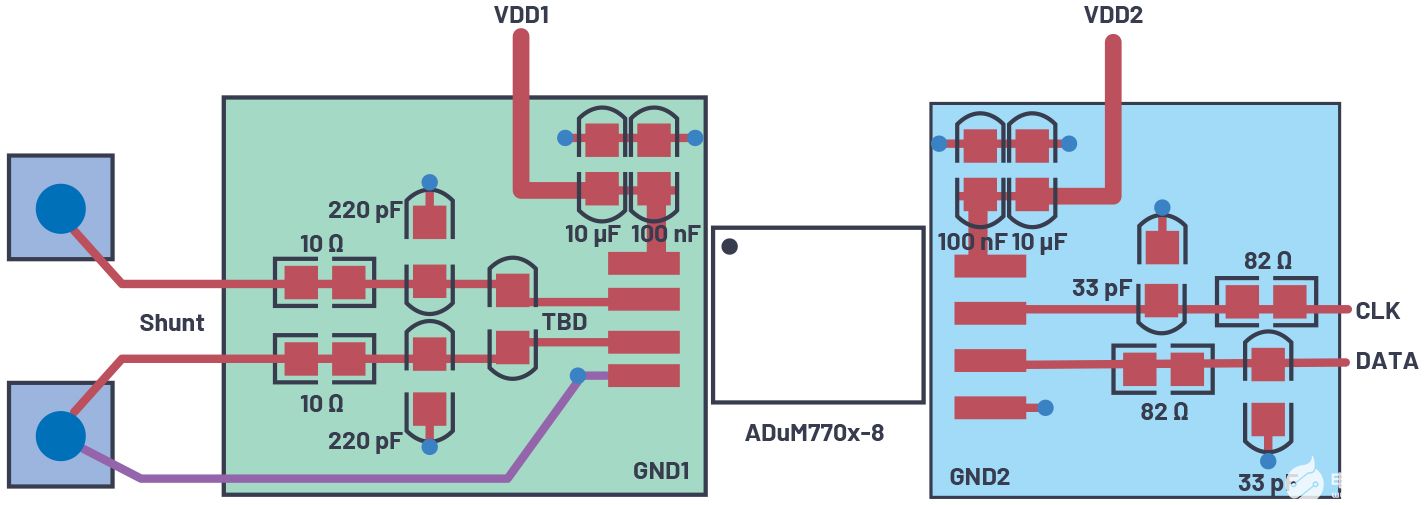
图7.ADuM770x-8电路的推荐PCB布局。
结论
最新的ADuM770x隔离式Σ-Δ调制器将CMTI提高到150 kV/μs水平,并改善了温度漂移性能,这极大地有利于电流测量应用。在设计阶段,使用推荐的电路和布局会很有帮助。
审核编辑:郭婷
-
滤波器
+关注
关注
160文章
7731浏览量
177693 -
逆变器
+关注
关注
283文章
4690浏览量
206305 -
电机
+关注
关注
142文章
8935浏览量
145105 -
调制器
+关注
关注
3文章
833浏览量
45109
发布评论请先 登录
相关推荐
新型隔离式Σ-Δ调制器如何提高和增强系统电流测量精度

采用ADC和隔离式Δ-Σ调制器的数据采集系统
Σ-Δ调制器提高运动控制效率
Σ-Δ调制器提高运动控制效率
Silicon Labs下一代交流电流传感器系列
隔离型Σ-Δ调制器的简化框图
AD7400: 隔离式Σ-Δ调制器
德州仪器推出AMC1200隔离式放大器与AMC1204调制器

下一代隔离式Σ-Δ调制器如何改进系统级电流测量
下一代隔离式Σ-Δ调制器如何改进系统级电流测量






 工商网监
工商网监
评论