 面向移动机器人市场,更理想的3D视觉模组R132来了!
面向移动机器人市场,更理想的3D视觉模组R132来了!
“多传感器融合是移动机器人未来发展的主要方向,其中,3D视觉技术不可或缺。
——银牛微电子联合创始人 何火高”
随着移动机器人应用场景的多元化,应用端对机器人的智能化需求不断上升,而智能化提升的第一步,就是要让机器人拥有更稳定、更智能的精准感知、理解和自主决策等能力。

银牛微电子作为全球双目立体视觉的持续引领者,一直以来,专注3D视觉,以移动机器人为切入点,利用3D双目视觉技术为移动机器人导航避障提供精准的三维立体数据信息。其推出的R132模组,具备强大的3D深度感知引擎、宽视场角等技术,可以有效解决机器人避障、3D重构、3D扫描等行业痛点,轻松满足室内室外应用场景需求,是3D性能、成本、功耗的更理想组合。
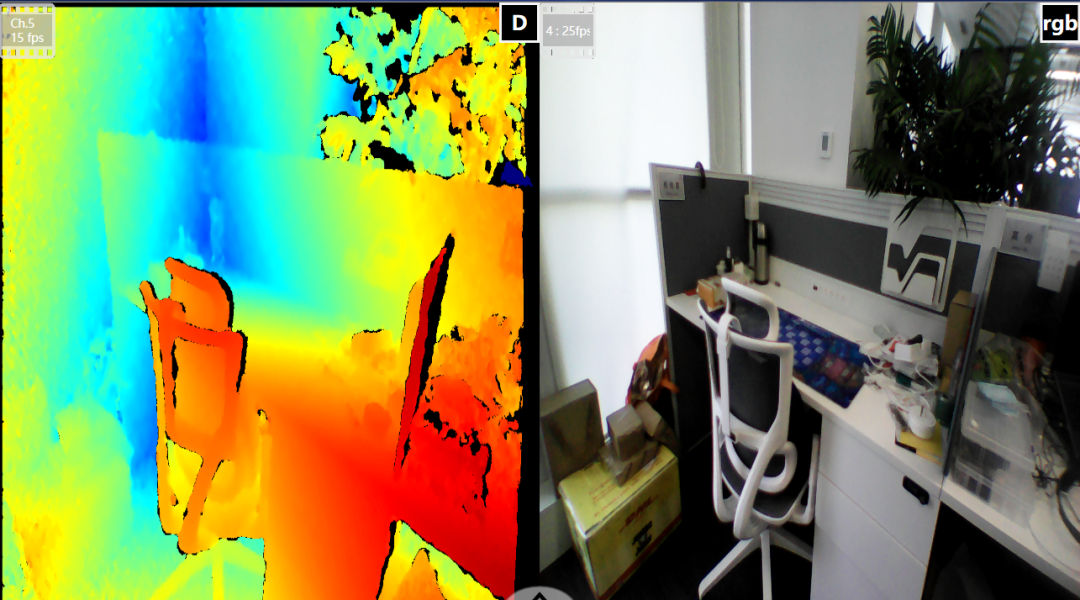
以下是R132 模组的3D效果图,可以让机器像人一样感知和理解世界。
1
强大的深度感知能力,打造核心竞争力
R1323D视觉模组
R132视觉模组基于NU4000芯片设计,该芯片采用12nm工艺,多核架构,单芯片集成3D深度感知、SLAM实时定位建图引擎、人工智能及通用CPU于一体,可为移动机器人、无人机、智能家居、元宇宙等场景提供从实时3D感知、计算到系统一体化的解决方案。
·强大的3D深度感知引擎:深度分辨率1280×720@30fps,感知距离0.2m-4m,精度误差<2%,可输出高分辨率的双目深度图像和点云信息;
·更大FOV深度视场角88°×58°:让机器人拥有更宽广的视野;
·RGB摄像头FOV完全覆盖深度FOV:RGB分辨率1600×1200,视场角92°×75°,实时检测识别跟踪多目标物体,对实现RGBD多传感器的融合提供方便;
·强劲的NU4000综合AI运算能力和灵活配置:通用ARM核支持不同应用,可独立运行系统,减少主控芯片和系统的负担,提高实时性;
·低功耗,更小尺寸:90mm×25mm×25mm,功耗低至1.8W;
·板载IMU:内外参数完整标定的板载IMU。
强大的深度感知能力,赋予了移动机器人“眼睛+大脑”的三维感知能力。通过多个摄像头及深度传感器的融合,利用带有深度信息的图像来实现对于场景的精准的数字化,从而实现高精度的识别、定位、重建、场景理解等机器视觉的关键功能,打造3D视觉核心竞争力。

2
室内外均可使用,避障/物体识别的更优方案
随着移动机器人应用场景的不断丰富,视觉导航易受室外强光线、室内阴暗光线影响的问题也随之出现。银牛R132视觉模组利用双目视觉方案,在精度、FPS、分辨率、识别距离等方面做了技术提升,同时加入了红外镜头、红外激光发射器等,有效解决了依赖环境光源、暗光场景表现不佳的问题,无论是在室外光还是在室内黑暗场景中,移动机器人都能够实现稳定作业。


R132模组在室外强光下稳定工作
3
细致入微,黑色/高反射物体识别精度高
除了环境光的影响外,机器人在运动过程中还会遇到黑色物体和高反射物体的检测识别。由于激光在面对这两类物体时“表现欠佳”,3D视觉技术的处理就显得尤为重要。
R132视觉模组采用双目视觉算法技术,并且增加了散斑激光投射器,可应对各种材质、颜色、形状物体的检测,降低反光、黑色、堆叠物体的误识别,在有效检测范围内,高精度的点云效果图,帮助机器人准确判断,“行动自如”。
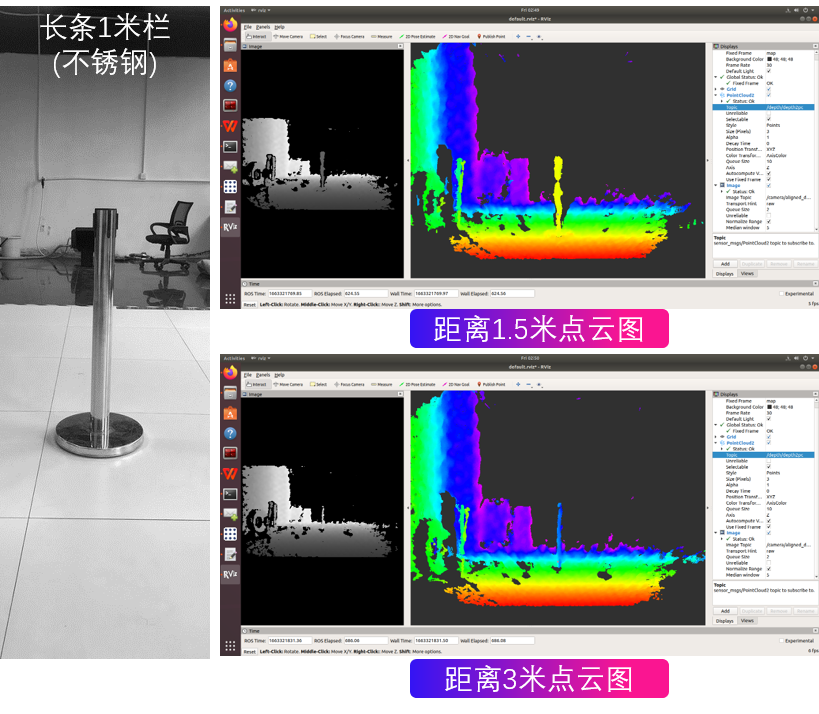
R132模组对反光物体的高精度识别
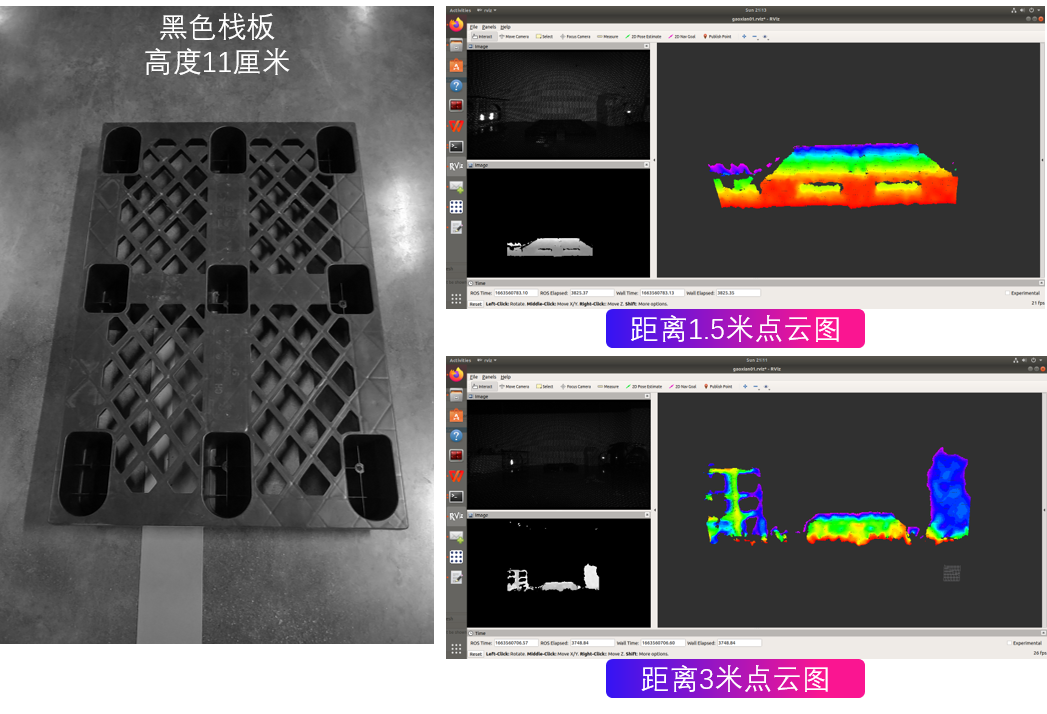
R132模组对黑色物体的高精度识别
4
降本增效,为行业带来新的变革
银牛微电子R132视觉模组作为通用型产品,高度集成了3D视觉深度引擎技术、SLAM技术及AI功能,可以大幅度缩短机器人企业研发、生产和应用试错周期,快速将机器人产品推向市场进行验证与应用。同时,3D视觉相机的成本相比激光器更低,能够为机器人行业降本增效,带来新的变革和产业升级。
后疫情时代,移动机器人作为“无接触“服务的一个智能载体,将会保持高速增长的势头。银牛微电子R132模组提供的全球领先的实时3D感知、计算到系统一体化的解决方案,将会为移动机器人客户和合作伙伴创造更多的价值。
未来,银牛微电子也将通过对3D核心技术的不断迭代和升级,用更多更全面的产品和服务,赋能更多的创新应用场景,协同构建3D机器视觉生态新格局。
审核编辑 :李倩
-
机器视觉
+关注
关注
162文章
4370浏览量
120307 -
移动机器人
+关注
关注
2文章
762浏览量
33572 -
3D视觉
+关注
关注
4文章
432浏览量
27526 -
银牛微电子
+关注
关注
0文章
22浏览量
154
原文标题:面向移动机器人市场,更理想的3D视觉模组R132来了!
文章出处:【微信号:Inuchip银牛微电子,微信公众号:Inuchip银牛微电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
思岚科技荣获双年度移动机器人优质供应链奖
移动机器人的技术突破和未来展望

智能移动机器人系统方案指南

新松移动机器人批量进军欧洲新能源市场
智能移动机器人

如何借助恩智浦MCX系列MCU纠错功能,打造可靠安全的移动机器人?

智能移动机器人系统的用途和市场趋势
海康机器人第100000台移动机器人下线
机械臂和移动机器人两种控制系统方案对比


ABB收购Sevensense:引领智能移动机器人技术迈向全新篇章
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
5个问题,洞悉自主移动机器人未来发展方向

一体化AMR控制系统可以实现不同工位物料的自动搬运、分拣、装卸等工作






 工商网监
工商网监
评论