 玩转OpenHarmony PID:教你打造两轮平衡车
玩转OpenHarmony PID:教你打造两轮平衡车
点击蓝字 ╳ 关注我们

王维平
OpenHarmony知识体系工作组
简介




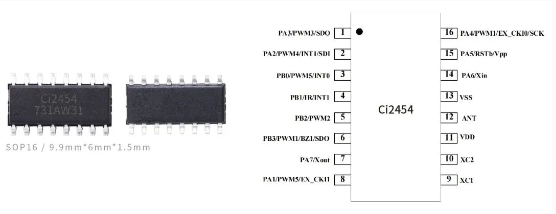
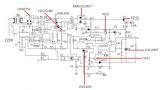
硬件配置资源
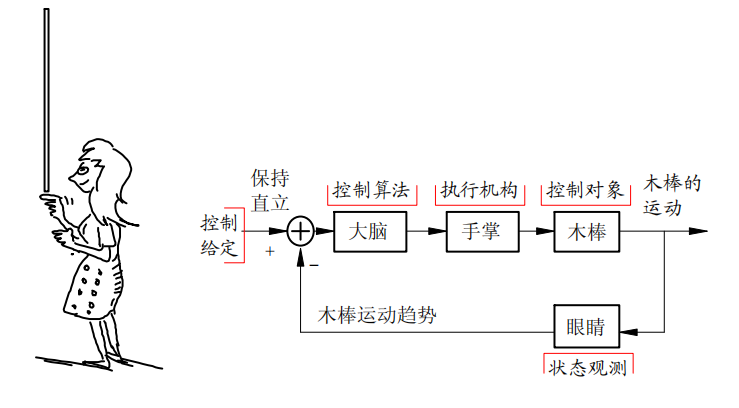
原理概括

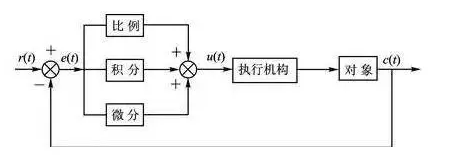
PID算法介绍

两步搭建样例工程


关键算法讲解


float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//极性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}总结
相关链接
https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/OpenHarmony-v3.2-beta1.md
https://gitee.com/openharmony-sig/vendor_oh_fun
https://gitee.com/bearpi/bearpi-hm_nano/tree/master/applications/BearPi/BearPi-HM_Nano/docs/quick-start
https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
https://gitee.com/openharmony-sig/knowledge_demo_smart_home
原文标题:玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信公众号:OpenAtom OpenHarmony】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
鸿蒙
+关注
关注
57文章
2398浏览量
43133 -
OpenHarmony
+关注
关注
25文章
3753浏览量
16718
原文标题:玩转OpenHarmony PID:教你打造两轮平衡车
文章出处:【微信号:gh_e4f28cfa3159,微信公众号:OpenAtom OpenHarmony】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
两轮车智能化研究:主机厂扎堆进入,两轮车智能化持续提升
佐思汽研发布《 2024-2025年两轮车智能化及产业链研究报告 》。 本报告聚焦两轮车的智能化升级,对电动两轮

九号公司与宝马集团携手合作,共创新型电动两轮车
集团在相关技术领域的专利优势,结合自身在智能两轮电动车领域的深厚技术积累和创新实力,共同开发生产具备自主产权的创新型电动两轮车。这些新型车辆将不仅拥有九号公司一贯的高品质和智能化特点,
Qorvo助力电动两轮车性能提升
电动两轮车已经成了中国人的出行神器,轻巧便捷,即停即走,接娃买菜轻松拿捏,让高油价和停车难不再是事。截至2023年底,中国电动两轮车市场拥有4.2亿辆的保有量,几乎每四人就有一辆,且市场仍未见顶。据预测,随着2023年新国标修订
两轮电动车系统介绍与THVD8000在两轮电动车上的应用
电子发烧友网站提供《两轮电动车系统介绍与THVD8000在两轮电动车上的应用.pdf》资料免费下载
发表于 09-27 11:12
•0次下载

LTE-CAT1模组在两轮车电池中的应用
随着城市交通拥堵问题的加剧和环保意识的提升,两轮电动车成为越来越多人的首选出行工具。作为其核心部件,电池的性能和安全性直接影响到两轮电动车的整体使用体验。为了提升电池管理系统的智能化水
安朔科技ble5.2蓝牙模块+两轮车蓝牙钥匙方案
在现代生活中,智能科技已深入我们的每一个角落,比如在电动两轮车领域,传统钥匙总是容易遗忘或丢失,给用户带来诸多不便,蓝牙车钥匙应运而生,则彻底解决了这一问题。只需在手机上安装相关应用程序,通过蓝牙

两轮车蓝牙无感匙开锁(PEPS)方案介绍
近几年来,随着科学技术的不断进步,两轮车的市场销售量也在连续不断的向上增长。产品性能、智能也有了一个很大的突破,预示着传统的机械式、指针式仪表在逐渐淘汰。在此基础上,为了使人们出行更方便,一些敏锐
常见的电动两轮车充电器会用到哪些IC和分立器件产品?
电动两轮车作为一种非常常用的交通工具,它非常实用、稳定、可靠,在我们短距离通行上面起到了关键作用。
比亚迪创新突破,或将在6月实现钠电池试点两轮车
在第二届钠电池产业峰会上,比亚迪公司的弗迪电池产品线总监张剑带来了一项重磅消息。他透露,比亚迪计划于6月在深圳开始一项划时代的试点项目:实现大圆柱钠离子电池在电动两轮车领域的充换电综合应用。这不

基于ACM32 MCU的两轮车充电桩方案,打造高效安全的电池管理
随着城市化进程的加快、人们生活水平的提高和节能环保理念的普及,越来越多的人选择了电动车作为代步工具,而两轮电动车的出行半径较短,需要频繁充电,因此在城市中设置两轮
发表于 03-06 15:10
两轮车事故频发,什么才是解决之道?
长期存在电动车乱停乱充的消防隐患。……近年来,我国两轮电动车市场快速增长。截至2022年末,两轮电动车保有量已达3.5亿辆,与此同时,电动车

比亚迪旗下弗迪电池将加大两轮车电池的研发投入
2月25日,比亚迪旗下弗迪电池表示,经探讨决定,弗迪电池将把乘用车的研发成果应用到两轮车领域,加大两轮车电池的研发投入,协同各方正能量,开发出更安全的电池。





 工商网监
工商网监
评论