 基于全天时单光子激光雷达背景噪声抑制技术
基于全天时单光子激光雷达背景噪声抑制技术
一、概述
单光子激光雷达具有极高的探测灵敏度,但也极易受到背景噪声光子的干扰,这在很大程度上降低了其白天的探测性能,限制了其适用范围。本文对全天时单光子激光雷达探测性能进行了分析,提出了一种新型的激光雷达背景噪声抑制技术,能够极大的提升单光子激光雷达在白天的探测性能。同时,本文还提出了一种普适性的ROI评价指数,能够极为直观的对各种激光雷达系统探测性能进行评价。
二、研究背景和意义
激光雷达作为一种高精度,高时间分辨率的主动探测技术,被广泛应用于遥感、空间目标探测、高分辨率三维成像等诸多领域。而单光子激光雷达(又称光子计数激光雷达)以时间相关单光子计数(Time-Correlated Single-PhotonCounting, TCSPC)机制,结合具有单光子级灵敏度的探测器件,能够对极微弱的回波信号进行探测,从而获得更远的探测距离,成为了激光雷达探测技术的前沿和发展趋势。然而,受限于探测器的死时间效应及其本身的概率检测机制,单光子探测极易受到噪声光子的干扰,尤其是白天工作时,除了信号回波外,由太阳辐射引起的散射的光子,不可避免的进入系统的接收视场内,成为背景噪声,进而使其探测性能急剧下降。因此,对全天时单光子探测性能进行分析,提高其白天探测能力对于拓展单光子探测技术的适用范围具有十分迫切的需求和极其重要的现实意义。
另外,为了能够更为直观的对同等系统资源需求下激光雷达探测性能进行评价,本文还提出了一种普适性的评价模型,即激光雷达系统的“投资回报率”ROI指数(Return On Investment)。该指数将激光雷达系统参数进行归一化处理,以此来评价一个激光雷达系统探测是否更为“经济”,能够极为直观的对激光雷达探测性能进行评估。
三、全天时单光子激光雷达探测
背景光噪声抑制技术是提升激光雷达全天时工作能力的关键,为了实现更好的光谱滤波,我们采用反射式布拉格光栅作为核心滤波器件,搭建了一个超窄带光谱滤波系统(Ultra-narrowband Spectral Filtering System,UNSFS),该系统的滤波带宽约为50pm,透过率约为85%,中心波长 1029nm。同时,采用波长为 1029nm的 Yb:YAG 窄线宽脉冲激光器作为激光雷达光源,系统结构如图1所示。激光重复频率为1.6kHz,单脉冲能量为20μJ,发射束直径为1mm。光学接收孔径为25mm,接收视场为1.3mrad。透镜收集的光线通过针孔后进入UNSFS,滤波后透射光线耦合到芯径为100μm的多模光纤中,然后进入单光子探测器。激光的发射和接收光束由带有中心孔的反射镜进行空间合束,在中心孔旁边放置PIN探测器,作为发射脉冲同步信号源。
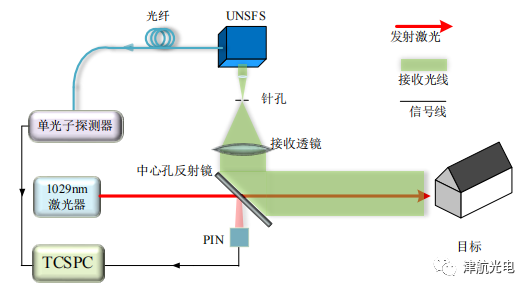
图1单光子激光雷达系统结构
完成雷达系统搭建后,我们首先进行了单点测距实验,实验目标选择为实验室所能观测到最远的目标,成都市东侧的龙泉山脉,从地图上得知该山脉距离实验地点的直线距离约为25km。实验时天气晴朗,能见度约22km。从上午10点到晚上10点,每小时进行一次探测,探测积累时间为1s(1600次),时间门宽度为16ns,结果见图2。
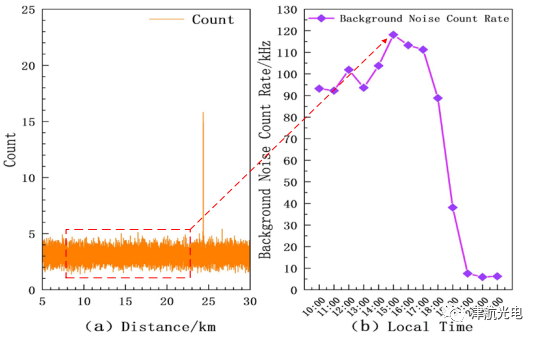
图2单点测距实验结果(a 为下午3点激光雷达回波光子计数距离直方图;b 为全天背景噪声计数率统计)
由图可见,在强烈背景光条件下,激光雷达系统也拥有非常高的信噪比,全天最大的背景噪声计数率仅为119kHz,远低于其他的光子计数激光雷达系统(一般为几兆Hz量级或者更多),系统拥有良好的日间工作能力。我们还进行了对城市区域的快速扫描三维成像实验,扫描的目标我们选择了成都市的地标建筑,成都金融城双子塔,该建筑有着较为明显的几何特征。实验时间选择在下午四点阳光强烈的时刻,当天能见度约为10km,整个扫描视场为1°×1°,扫描的图像分辨率为100×141。得益于本系统优异的背景噪声抑制能力,使得整个探测扫描的时间大为缩短,这对于远距离三维成像来说至关重要。整个扫描时间为85s,单点累加时间约为6ms。扫描结果如图3所示。
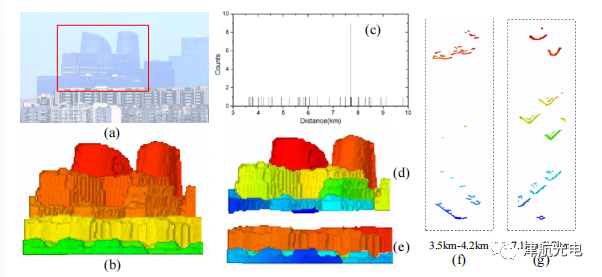
图3快速扫描三维成像实验结果
图中(a)为在实验室由光学相机拍摄得到的目标照片,红色线框为激光雷达扫描区域;(b)为扫描全景三维点云图像;(c)为单个像素在 6ms 累加时间下的光子计数直方图;(d)为7.1-7.7km 远景三维点云图;(e)为3.5-4.2km 近景三维点云图;(f)和(g)分别为近景和远景区域顶视图。从结果中可以看出,整个点云图分布在3.5-7.7km 范围,能够非常精细的展示出双子塔的表面轮廓(细节处有穿透成像),同时前方建筑群的细节也能够得到有效的展现。这证明了该系统能够出色完成日间强烈背景光条件下的快速三维成像。
四、激光雷达系统评价
对于激光雷达系统来说,增加接收光学孔径和发射激光功率总是可以获得更远的探测距离,但这不可避免地会带来对系统资源的更多需求,给雷达的实际应用带来困难。这里我们引入经济学的概念。体积、重量、功耗等系统资源对于一台激光雷达来说,可以认为是各种“投资”,而“回报”就是最大探测距离。在经济学上,人们追求更高的投资回报率(Return On Investment,ROI),对于激光雷达系统,同样也应如此。由此,我们可以通过在单位接收面积、单位发射功率和单位探测时间下的系统最大探测距离平方来得到激光雷达的 ROI 指数,以如下形式给出:

式中Z是激光雷达的最大探测距离,AR是系统有效光学接收面积,P是激光发射的平均功率,T是单像素的探测累积时间(对于N×M面阵探测激光雷达,其单像素探测时间为T/(N×M)),ET是激光单脉冲能量,N为每个像素的脉冲累积次数(对于线性探测激光雷达,N=1)该指数可以认为是激光雷达系统的“投资回报率”。显然,ROI指数越高,激光雷达的探测效率就越高,或者说激光雷达探测更为“经济”。上文提出的新型单光子激光雷达的 ROI指数为6.03E14,是一个相当高的分数。
五、结论
对于全天时工作的单光子激光雷达,条件允许时,超导纳米线单光子探测器会有较大优势,除此之外,综合考虑目前的器件水平以及日光辐射、大气散射等影响,采用1μm波段作为探测波长和硅基的单光子探测器,会带来更好的探测性能。
本文采用一种新型的超窄带光谱滤波技术搭建了一套新型的全天时单光子激光雷达系统。利用该激光雷达在城市复杂大气环境中完成了24.35km的测距与全天时噪声水平的测试实验。随后完成了 3.2-7.7km的高动态快速三维扫描成像实验。实验结果表明该系统能够在强烈背景光条件下出色的完成探测任务,能够极大的提升单光子激光雷达的全天时探测能力,为白天工作的激光雷达提供了一种新的实用解决方案。
此外,为了对实际激光雷达系统的性能进行评价,类比经济学中的“投资回报率”概念,本文提出了一种激光雷达评价模型,即ROI指数,该指数能够十分直观的对各种激光雷达系统探测性能进行评价,可作为一种通用的激光雷达性能评价标准。本文提出的新型单光子激光雷达的ROI指数为6.03E14,是一个相当高的分数。
作者简介
第一作者:刘博,研究员,博士生导师,中国科学院“百人计划”A 类海外引进人才,四川省“千人计划”特聘专家,中国科学院空间光电精密测量技术重点实验室副主任,中国科学院大学光电学院教学委员会委员、主讲教授。主要研究方向为激光雷达探测与通信,作为项目负责人承担并完成多项国家重大科研项目,在激光探测研究领域取得多项显示度成果。
审核编辑:郭婷
-
探测器
+关注
关注
14文章
2669浏览量
73484 -
激光器
+关注
关注
17文章
2578浏览量
60953 -
激光雷达
+关注
关注
969文章
4057浏览量
190842
原文标题:【特邀报告】全天时单光子激光雷达技术进展与系统评价
文章出处:【微信号:CloudBrain-TT,微信公众号:云脑智库】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
DeepSeek:2025年激光雷达技术与行业应用趋势


一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
使用单光子探测技术设计的数字混沌激光雷达系统

单光子激光雷达:航空遥感技术的革命性突破

激光雷达的维护与故障排查技巧
激光雷达技术的发展趋势
中科院微电子所在光子集成激光探感技术方面取得进展
光学雷达和激光雷达的区别是什么
基于SPAD单光子相机的LiDAR技术革新

机载单光子激光雷达系统用于实现高分辨率3D成像

基于光子-电子集成回路的相干激光雷达引擎设计
硅基片上激光雷达技术综述

激光雷达的探测技术介绍 机载激光雷达发展历程






 工商网监
工商网监
评论