 基于改进PID的伺服电机控制优化模型构建及仿真
基于改进PID的伺服电机控制优化模型构建及仿真
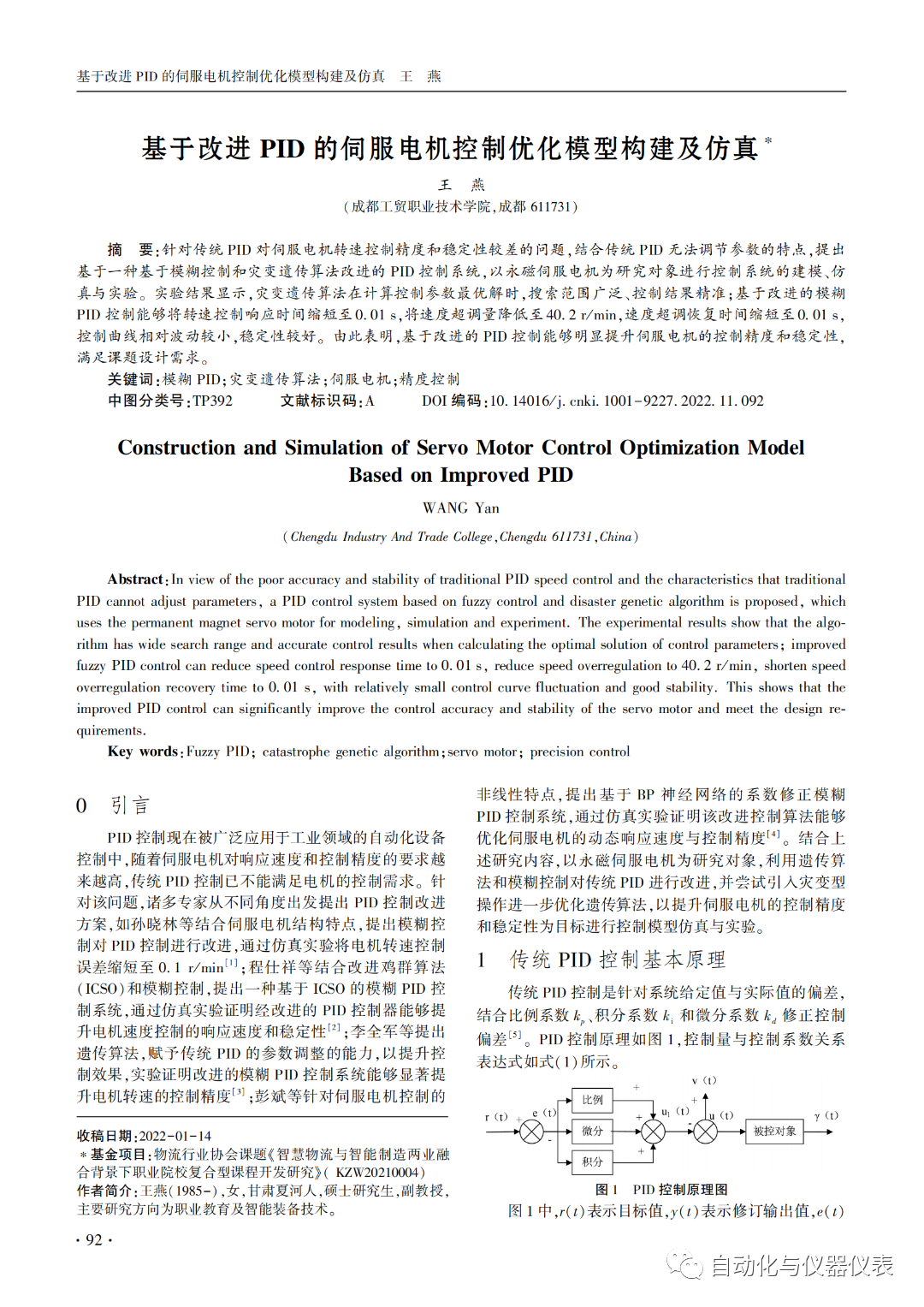
摘 要:针对传统 PID 对伺服电机转速控制精度和稳定性较差的问题,结合传统 PID 无法调节参数的特点,提出基于一种基于模糊控制和灾变遗传算法改进的
控制系统以永磁伺服电机为研究对象进行控制系统的建模 仿真与实验。 实验结果显示,灾变遗传算法在计算控制参数最优解时,搜索范围广泛、控制结果精准;基于改进的模糊PID 控制能够将转速控制响应时间缩短至 0. 01 s,将速度超调量降低至 40. 2 r / min,速度超调恢复时间缩短至 0. 01 s, 控制曲线相对波动较小,稳定性较好。 由此表明,基于改进的 PID 控制能够明显提升伺服电机的控制精度和稳定性, 满足课题设计需求。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6604浏览量
110574 -
PID
+关注
关注
35文章
1472浏览量
85471 -
伺服电机
+关注
关注
85文章
2043浏览量
57804
原文标题:基于改进 PID 的伺服电机控制优化模型构建及仿真
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
其利天下技术开发·引起伺服电机抖动的可能性因素·伺服电机驱动器开发
上周,我们公司的伺服电机工程师在测试伺服电机时,电机突然发生强烈抖动。经过排查,也解决了问题。我觉得这个话题可以值得聊聊,

伺服电机原理及控制应用
伺服电机(Servo Motor)是一种高精度、高性能的电动机系统,广泛应用于需要精确控制位置、速度和加速度的场合。 一、伺服电机的工作原理
plc控制伺服电机的指令有哪些
PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备。伺服电机作为执行元件,可以通过PLC进行精确控制。以下是关于PLC
交流伺服电机工作原理 交流伺服电机的控制方式
交流伺服电机是一种通过闭环反馈控制系统实现精确位置、速度和转矩控制的电机。它在工业自动化、机械加工、机器人领域有着广泛的应用。本文将详细介绍





 工商网监
工商网监
评论