 步进电机力矩控制 | 适用于夹爪及开瓶盖场合
步进电机力矩控制 | 适用于夹爪及开瓶盖场合

随着工业及高精度工艺的飞速发展,机械自动化的运动控制替代了许多人工重复性的工作,智能化的生产线让企业在效率上得到了大大的提升。应对不同的生产环境,工业机器人夹爪的性能起到了至关重要的作用,柔性、自动控制、自动反馈、智能抓取等复杂操作,是企业核心技术及生产效率的核心。
Trinamic步进伺服控制器,能够实现电机的力矩控制(扭矩控制)。特别是应用在一些机器人夹爪、工业夹爪、实验室自动化、开盖扭瓶盖等场合。
Trinamic如何实现力矩控制
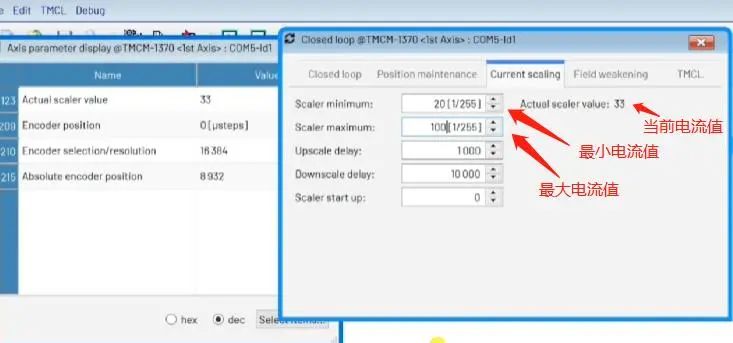
扭矩(力矩)控制,用Trinamic的一体式步进伺服闭环控制器为例,支持串品或者是CAN通信,通过TMCL-IDE上位机软件进行设定它的力矩值,通过软件上传指令,如设定最小电流/电大电流,电机工作时它的电流会在这最大值与最小值之间,负载越大电流值越大,当我们需要力控制的时候,我们可以通过编码器反馈的值来进行设定一个合适的值,当外面的力达到所设定的值时,就会触发一个输出信号。
灵活性与安全性
面对不同的物体,我们担心的是输出的力会损失被夹的物体。那我们可以根据实际所需要的设置最大的力,也就是它的最大电流值,对于夹爪外部用力的控制也体现的相当灵活。我们也可以通过程序,让它达到所设定的最大值时,自动停下来。
在夹爪工作的同时,程序会不断的监控它的力,不让它输出的力大于某一个值,当它达到这个值时,电机就会停下来,并且始终保持这个力,但又不会夹坏这个物体,确保物体的安全性,也同时提升了夹爪的的性能。
总结
Trinamic的运动控制及上位机软件,能够让您轻松的掌握它的控制方法,让项目更快完工。步进伺服的力矩控制,在实现位置、速度闭环的同时,它会随着负载而不断发出信号,我们也可以让这个信号做出更多动作,如停止、保持一段时间、反转等,当信号结束后,又会回到原来的位置,更有利于夹爪或者其他应用场合的工作灵活性与安全性。
-
步进电机
+关注
关注
153文章
3277浏览量
152888 -
工业机器人
+关注
关注
91文章
3557浏览量
98614 -
上位机
+关注
关注
28文章
1049浏览量
57410 -
力矩控制
+关注
关注
0文章
6浏览量
7230 -
电机控制芯片
+关注
关注
5文章
64浏览量
33115
原文标题:步进电机力矩控制 | 适用于夹爪及开瓶盖场合
文章出处:【微信号:gh_acd058a2252c,微信公众号:智联微 电机控制芯片】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
柔性夹爪功率链路设计实战:效率、可靠性与动态响应的平衡之道

无驱动板条件下步进电机控制实现及性能对比
多功能步进电机驱动控制板设计:适配多场景的集成化方案
为什么步进电机的力矩会随转速的升高而下降
Robotiq推出适用于 2F 自适应夹爪的触觉传感指尖, 为具身智能 (Physical AI) 注入“触觉”能力

力矩电机式调节仪表控制方式
罗姆推出广泛适用于直流有刷电机的通用电机驱动器IC

TPIC2050 电机驱动IC技术文档总结

单片机怎么控制步进电机的
适用于 WLAN 和蓝牙®应用的 2.4 GHz 高效前端 skyworksinc

适用于电机控制的电流滤波方法
车载步进电机驱动TB9120FTG TB9120AFTG 适用于广泛的车载应用IC




评论