 KUKA机器人的制动
KUKA机器人的制动
机器人的制动
应在出现一个事件后立即停住机器人。
有两个制动斜坡可供选择(STOP 1 和 STOP 2)。
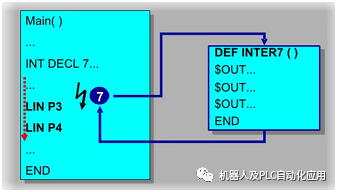
机器人停下时,中断程序先继续运行。
中断程序一结束,已开始的机器人运动就将继续进行。
句法:
1. BRAKE:STOP 2
2. BRAKE F:STOP 1
BRAKE 只能用于一个中断程序中。
如果处理中断例程的时间短于主程序中制定的轨迹规划,则机器人可不中断而继续运行。
如果中断例程所需的时间长于规划的轨迹,则机器人在其轨迹规划的终点停下,中断例程一执行完毕,它将继续运行。
不允许使用用于初始化 (INI ) 或运动(例如 PTP 或 LIN ...)的联机表单。处理时这些表单将引发出错信息。
机器人被用 BRAKE 停住,中断例程结束时它将沿着主程序中计划的轨迹继续运行。
机器人被用 BRAKE 停住,在中断例程中运行。中断例程结束后将继续沿着主程序中定义的轨迹运行。
例如:
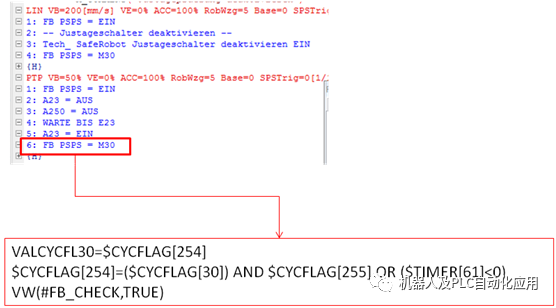
机器人运动过程等待条件FB SPS的结合BRAKE深入分析
DEF FB_CHECK ()
IF $CYCFLAG[254] AND ($TIMER[61]<0)THEN
BRAKE如果有M254 还有T61 就停止移动轨迹-
IF $PRO_MODE<>#BSTEP THEN -程序不是单步-
WAITFOR ($TIMER[61]>0) -等待T61在单步后由-300转而大于0
ENDIF
ENDIF
$LOOP_CONT=TRUE-循环控制当$LOOP_CONT=False时是开启了模拟指令-
WAITFOR $CYCFLAG[254] OR ( NOT ($LOOP_CONT) AND ($MODE_OP<>#EX))
等待M 254 –或者在手动时模拟信号-
$LOOP_CONT=TRUE
审核编辑:刘清
-
机器人
+关注
关注
211文章
28379浏览量
206914 -
模拟信号
+关注
关注
8文章
1128浏览量
52442
原文标题:KUKA机器人制动-BRAKE
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
KUKA机器人问题解答
库卡KUKA机器人四种启动方式介绍
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
工业机器人组成结构相关资料分享
库卡机器人MGV电源模块维修
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
KUKA机器人制动-BRAKE
浅谈KUKA机器人制动-BRAKE V4.26

KUKA机器人制动-BRAKE V5.20操作程序






 工商网监
工商网监
评论