 异步电机速度估计学习
异步电机速度估计学习
导读:本期文章主要介绍一下用异步电机的运动方程来进行速度估计,低速区域的估计效果还不错。
异步电机矢量控制系统中,转速的闭环控制必不可少,其是保证控制稳定性和控制性能的保证。矢量控制从其获取速度的不同方法来分,可以分为有速度传感器和无速度传感器两大类。一般早期的异步电机矢量控制常采用光电码盘等速度传感器来进行转速的直接检测,并反馈被测电机的转速信号。但额外的速度传感器不仅会增加系统的成本,其次如果传感器安装不当也易影响测速精度,而且传感器的安装还会使电机轴向上体积增大,给电机的日常维护带来一定困难,并且速度传感器还会降低电机的机械鲁棒性,在高温、高湿环境下传感器精度也会受到影响.基于这些不足,为了克服上述问题人们开始研究无速度传感器矢量控制方法。
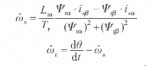
一、运动方程
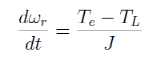
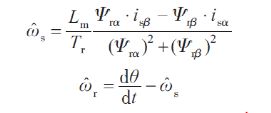
 :转子角速度,
:转子角速度, :电磁转矩,
:电磁转矩, :负载转矩,J:机械转动惯量。
:负载转矩,J:机械转动惯量。
由上式异步电机的运动方程可知,转子角速度的估计只需要对电磁转矩和负载转矩的差进行积分,便可得到且容易实现。
二、建模
2.1负载转矩TL
利用信号发生器,给异步电机加上负载转矩。幅值是7.5,频率设为1秒。

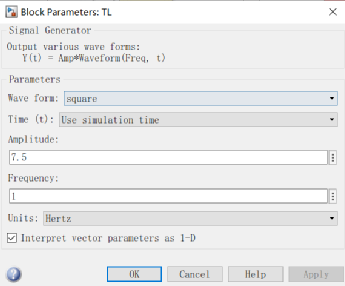
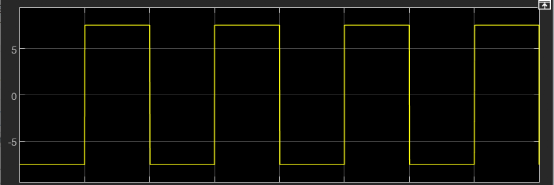
图1 负载转矩变化情况
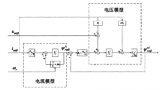
2.2速度估计
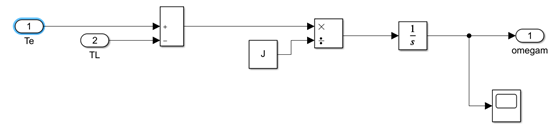
图2 实现过程
实现的过程完全是根据异步电机的运动方程。
三、仿真波形
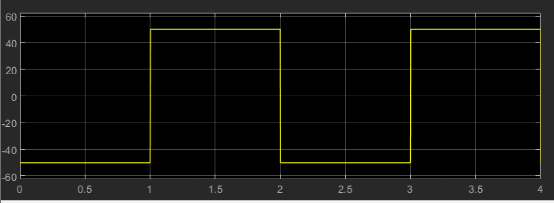
图3 速度给定情况
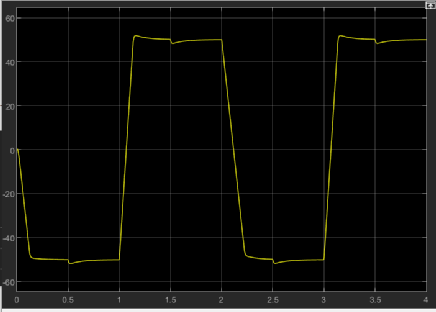
图4 速度估计波形变化情况
从图3给定转速看,图4的速度估计的效果很好。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2552文章
51383浏览量
756129 -
建模
+关注
关注
1文章
313浏览量
60827 -
异步电机
+关注
关注
6文章
427浏览量
32911 -
矢量控制系统
+关注
关注
0文章
14浏览量
8188
原文标题:异步电机速度估计学习
文章出处:【微信号:浅谈电机控制,微信公众号:浅谈电机控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
异步电机速度估计方法之直接计算法
导读;异步电机速度估计的方法主要分为两大类:模型法和基于非理想特性的方法。本期文章介绍的是直接计算法(动态速度估计器),这种方法属于模型法中
发表于 05-05 15:31
•492次阅读
异步电机的无速度传感矢量控制设计
异步电机的无速度传感矢量控制设计矢量控制技术在速度和转矩控制经过了长期的发展,逐渐趋于成熟,这使得在电机领域交流控制可以拥有与直流控制系统一样甚至更好性能成为可能。由于无
发表于 01-21 15:40
什么是异步电机?
在家学习一下Simulink自带的异步电机模型,异步电机是双馈电机(DFIG、DFIM)的基础。Mechanical inputSelect the torque applied
发表于 07-07 06:20
SIMUlink的异步电机的建模与仿真讲解
SIMUlink的异步电机的建模与仿真SIMUlink的异步电机的建模与仿真SIMUlink的异步电机的建模与仿真SIMUlink的异步电机的建模与仿真
发表于 12-28 18:10
•0次下载
三相异步电机和单相异步电机之间怎么区别?
异步电机由于简单粗暴的构造和经济实惠以及维护成本低出圈。它的转子可以是鼠笼式转子或绕线式转子,之所以这样设计,是因为异步电机的运行速度始终低于同步速度,因为定子中旋转磁场的
力矩电机和异步电机区别
力矩电机和异步电机之间有几个重要区别:
工作原理不同:力矩电机是基于磁滞现象的工作原理,而异步电机是基于电磁感应的工作原理。力矩电机
发表于 03-10 14:51
•1891次阅读
异步电机控制笔记
控制,对异步电机在转子磁场定向下的状态方程模型进行了推导,并基于状态方程模型讨论了三闭环控制算法的实现,以及MTPA与MTPV的实现方法。然后对开环的磁链估计器与闭环的磁链观测器进行了讨论。 为了实现异
发表于 03-29 11:40
•5次下载

异步电机无速度传感器矢量控制学习
导读:本期文章主要介绍异步电机无速度传感器矢量控制。首先分析无速度传感器的优势,然后分次介绍不同的速度估计方法,最后进行MATLAB/Sim
发表于 03-29 11:42
•1次下载
异步电机矢量控制之磁通估计器
在鼠笼式异步电机中,转子机械转速略小于旋转磁场的转速。两者之间角速度的差异称作转差率,并以旋转磁通速度的百分
比来表示。
例如,如果转子转速和磁通旋转速度相同,则转差率为0:而当转
发表于 03-29 09:32
•2次下载
异步电机速度估计-直接计算法
异步电机矢量控制系统中,转速的闭环控制必不可少,其是保证控制稳定性和控制性能的保证。矢量控制从其获取速度的不同方法来分,可以分为有速度传感器和无速度传感器两大类。
发表于 05-25 17:28
•927次阅读

异步电机速度估计之直接计算法
异步电机速度估计的方法主要分为两大类:模型法和基于非理想特性的方法。本期文章介绍的是直接计算法(动态速度估计器),这种方法属于模型法中的开环
异步电机与同步电机的区别和应用
的转子是由绕组组成的铝棒,它通过感应电磁力的作用与旋转的磁场相互作用而转动。异步电机的转子速度略低于旋转磁场的速度,这也是它的名字的由来。同步电机的转子和旋转磁场的





 工商网监
工商网监
评论