 使传感器技术不那么模糊
使传感器技术不那么模糊

许多人戴眼镜是为了改善他们的视力。开车时不戴眼镜,他们无法看清东西,例如停车标志。在开车时,我们都希望避免穿过十字路口并被其他司机撞到。驾驶时应始终佩戴眼镜,以便他们能够最好地识别前方道路上的危险(图 1)。
检测和识别物体的能力几乎是所有视觉应用的核心。然而,实现这一目标的方法几乎与这样做的理由一样多。这篇博客着眼于几个用于检测物体的标准传感器。
相机
在视觉应用中,相机可能是大型电子视觉系统的一部分。它们的使用方式类似于人眼。
在视觉系统中使用相机的几个优点包括:
可能被定位为“看到”整个上下文,或者至少是被认为足够合适的内容
在各种情况下“超越”人类的潜力
通过应用不可见光源,即人眼可响应的大约 380nm – 750nm 光谱之外的光源
可以通过以下方式学习:
机器学习(机器学习)
神经网络(NN)
通常成本较低
处理天气环境有点类似于人类的视力
雷达
作为电子工程师,我们中的许多人都知道还有其他传感技术可以让我们“看到”人眼通常看不到的东西。这方面的一个例子是雷达(图 3)。雷达是无线电探测和测距的缩写。雷达使用无线电波 (3MHz–110GHz) 来帮助确定物体的距离(测距)、角度或速度。我们中的许多人都熟悉雷达示例,了解航空器在天空中飞行时是如何被跟踪的。它提供了一种“查看”飞机所在位置的方法。在查看我们当前权限范围内的应用(车辆和机器人技术)时,通常会使用毫米波 (30–300GHz)。
在视觉系统中使用雷达的几个优点包括:
小封装尺寸和天线
大带宽
高多普勒频率
高度集成
可靠的
实惠
毫米波传感器
德州仪器(TI) 的毫米波传感器是提供工业 (IWR) 和汽车 (AWR) 选项的雷达解决方案。使用毫米波 SDK 简化传感,在不到 30 分钟的时间内利用和评估传感项目。空间和速度分辨率可以检测到比传统解决方案高出三倍。CMOS 单芯片传感器通过将 RF 前端与 DSP 和 MCU 集成在一起来缩小设计尺寸。
AWR
AWR 系列汽车毫米波传感器可增强驾驶体验,通过分析附近环境并对其做出反应,使其更安全、更轻松。
国际水资源研究所
IWR 系列工业毫米波传感器通过检测物体的范围、速度和角度提供前所未有的精度和稳健性。
激光雷达
这个概念可以应用于光波,而不是使用无线电波。光探测和测距 (LiDAR) 使用电磁光脉冲来确定物体的距离(测距)、角度或速度。
使用 LiDAR 的优点可能包括:
准确性
精确
3D成像
不受外部照明条件影响
所需的计算能力相对较低
飞行时间 (ToF)
飞行时间 (ToF) 是对物体、粒子或波在介质中传播一段距离所需时间的测量。分析这些数据可以揭示速度或路径长度等概念,以及粒子或介质的特性。ToF 应用包括机器人和人机界面 (HMI) 中的接近感应和手势识别。
结论
我们介绍了不同类型的物体检测传感器,并研究了每种传感器的不同优势。正如我们所知,并非所有相机都生来平等。其中大部分归结为应用程序。我们还了解到,开发人员在开发新传感器方面取得了重大进展,这些传感器可以密切模仿人眼感知视野变化的能力。在某些情况下,我们使用的传感器技术超出了我们的眼睛所能看到的范围。也许,有一天我们对处方眼镜的需求将会过时。
审核编辑黄昊宇
-
传感器
+关注
关注
2578文章
55811浏览量
795402
发布评论请先 登录
六维力传感器是维度最高的力觉传感器
磁传感器技术的主要类别与工作原理

BLDC无位置传感器控制方式介绍
CW32温度传感器的应用
角度传感器原理、技术与实用指南

TE Connectivity SMI低压传感器技术解析与应用指南
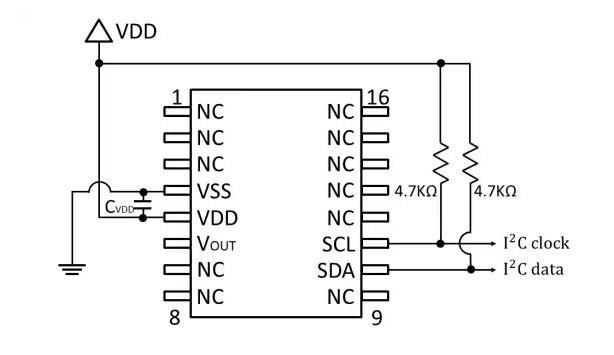
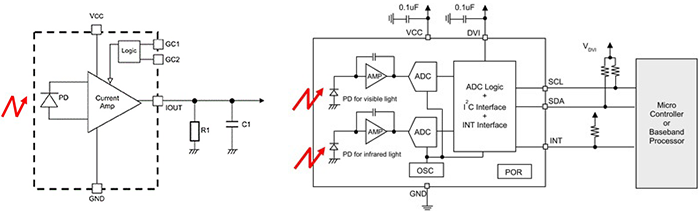
什么是照度传感器和接近传感器
封装技术在传感器行业的具体应用
磁通门电流传感器

基于锁相环的无轴承同步磁阻电机无速度传感器检测技术
基于改进模糊PI控制的无位置传感器无刷直流电机调速研究
如何选择酒精传感器

新型磁传感器技术@Melexis



评论