 S7-200 SMART PLC与smart line触摸屏进行modbus rtu通讯
S7-200 SMART PLC与smart line触摸屏进行modbus rtu通讯
导读
本文章会详细介绍西门子S7-200 SMART PLC与smart line触摸屏进行modbus rtu通讯连接的步骤。
一、硬件连接
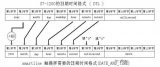
1、smart line触摸屏485端口脚位定义
如图1所示:
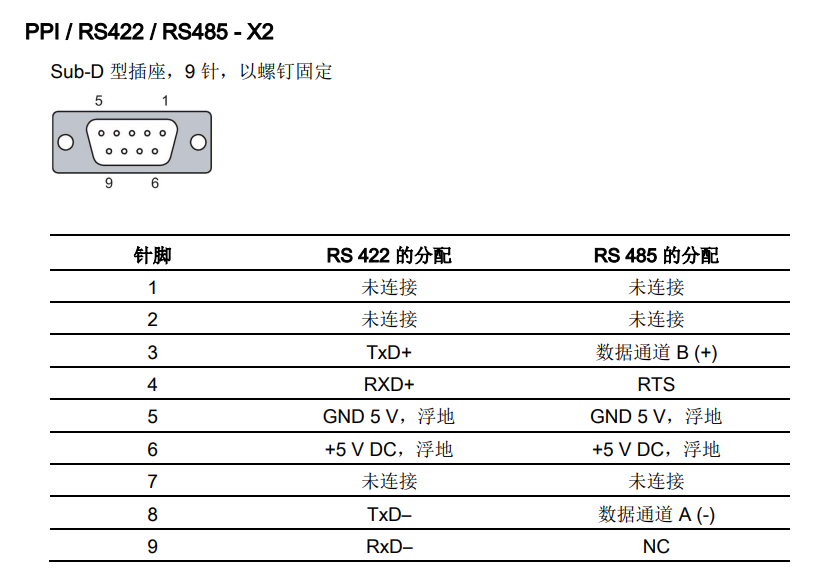 图1
图1
2、200 SMART PLC 485端口脚位定义
1)200 SMART PLC本体端口
200 SMART PLC选择可以选择CPU 集成的 RS485 通信端口和标准型 CPU 额外支持 SB CM01 信号板。CPU 集成的 RS485 通信端口的引脚分配如图2所示,CPU 额外支持 SB CM01 信号板
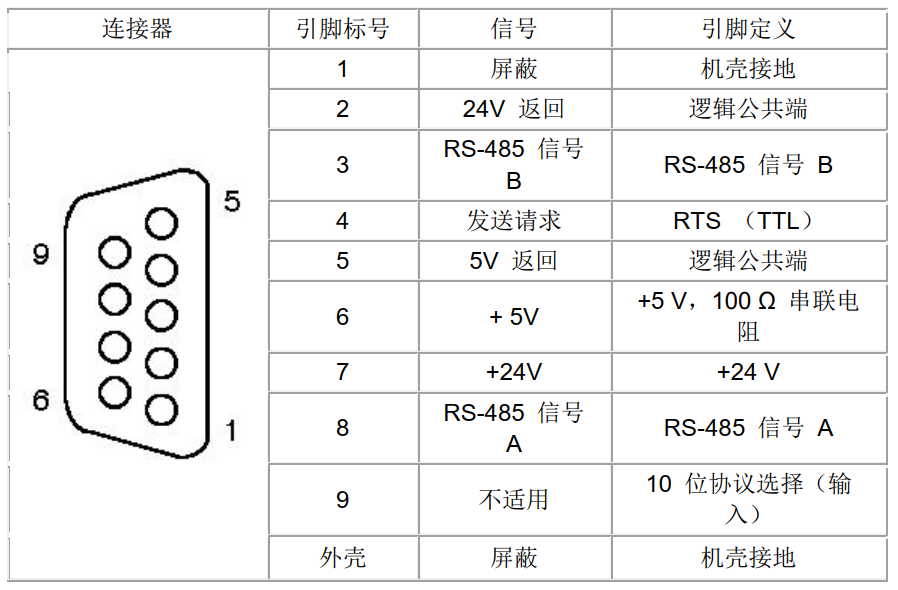
图2
2)200 SMART 信号板
标准型 CPU 额外支持 SB CM01 信号板,该信号板可以通过 STEP 7-Micro/WIN SMART 软件组态为 RS485 通信端口或者 RS232 通信端口。SB CM01 信号板的引脚分配,如图3 所示。
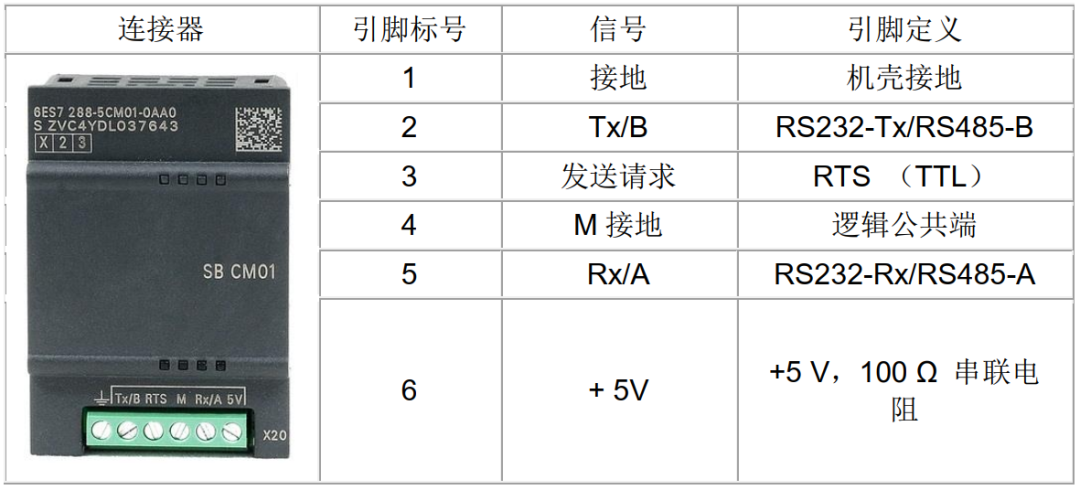
图3
3、PLC与触摸屏连接
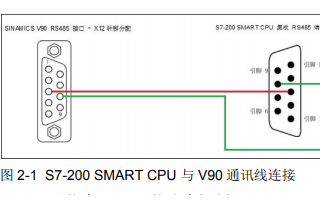
1)CPU 集成的 RS485 通信端口与触摸屏连接
PLC端口引脚3连接触摸屏端口引脚3,PLC端口引脚8连接触摸屏端口引脚8,如图4所示。
2)SB CM01 信号板与触摸屏连接
SB CM01 信号板Tx/B连接触摸屏RS-485端口引脚3,SB CM01 信号板Rx/A连接触摸屏RS-485端口引脚8,
如图4所示,本文章为200 SMART PLC本体端口进行通讯连接。

图4
二、WinCC flexible SMART软件设置
1、通讯参数设置
1)打开WinCC flexible SMART软件在文件菜单栏中新建项目选择Smart 700 IE V3这款触摸屏,如图5所示;
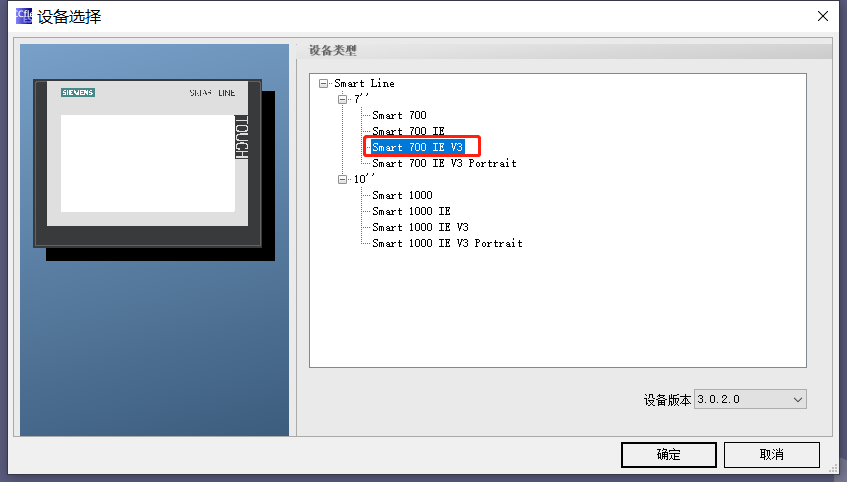 图5
图5
2)在项目栏中的通讯—连接,进行通讯参数设置,modbus rtu通讯可以有三种选项,如图6所示。
注意:
200 SMART PLC与smart line触摸屏连接要勾选“更改 word order”。
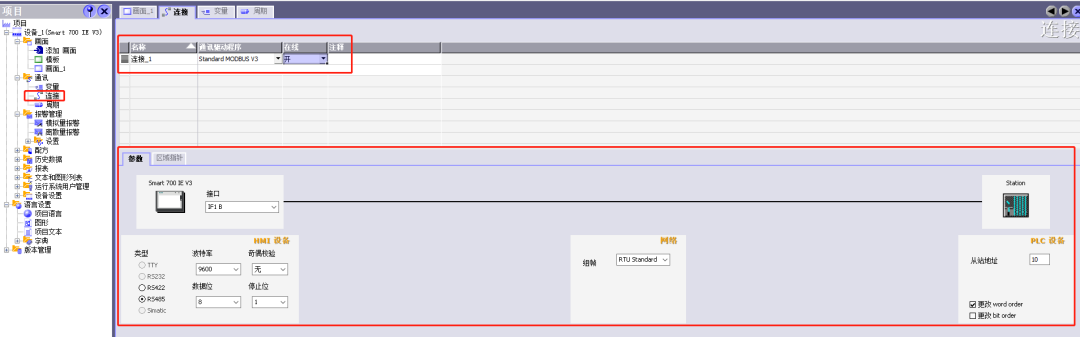
图6
3)变量建立
建立PLC连接变量,如图7所示:
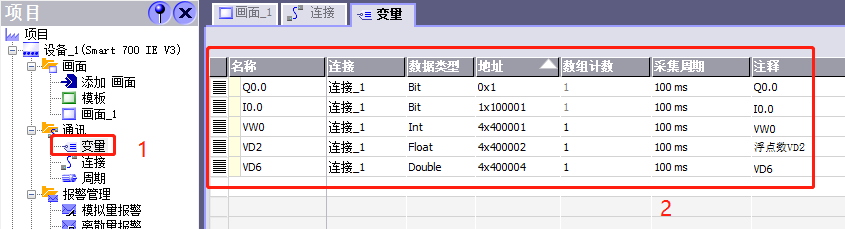
图7
200 SMART PLC的MODBUS RTU 地址如下所示:
u对于离散量输出(线圈),为 00001 至 09999
u对于离散量输入(触点),为 10001 至 19999
u对于输入寄存器,为 30001 至 39999
u对于保持寄存器,为 40001 至 49999 和 400001 至 465535
注意:
200 SMART编程从站保持寄存器是从VW0开始(与程序编程有关系,后续编程部分会介绍),所以400001为VW0。
2、组态编写
通过工具栏选择圆、文本域、IO域编辑组态,如图8所示,根据下列组态步骤组态程序。
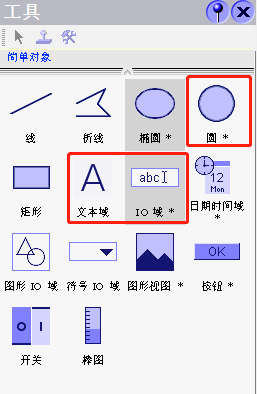
图8
1)指示灯组态
组态如图9所示:
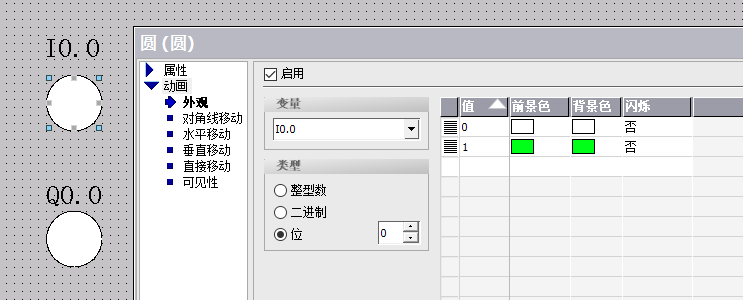
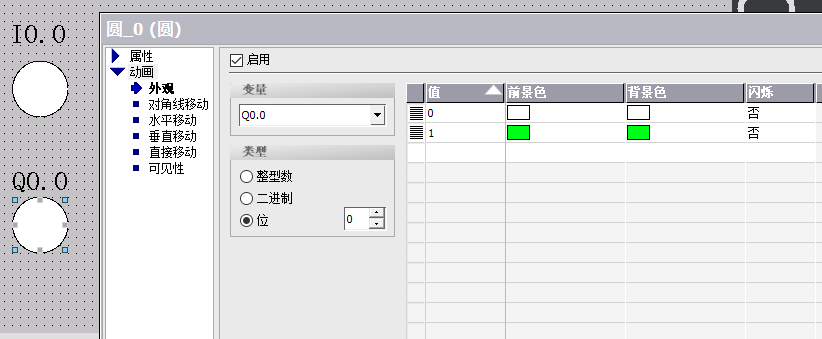
图9
2)16位无符号整数组态
组态如图10所示:
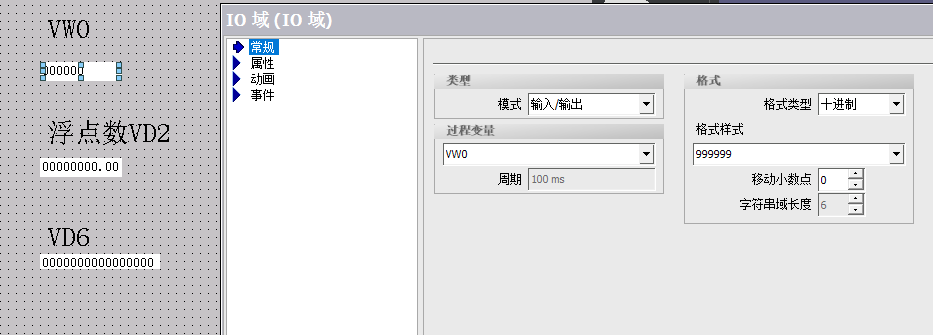
图10
3)32位无符号整数组态
组态如图11所示:
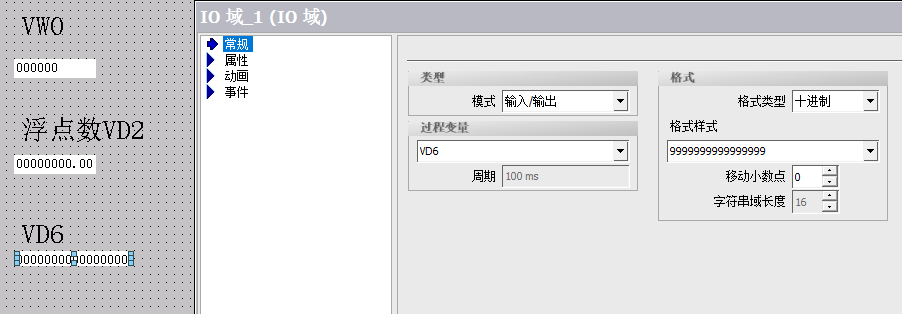
图11
4)32位浮点数
组态如图12所示:
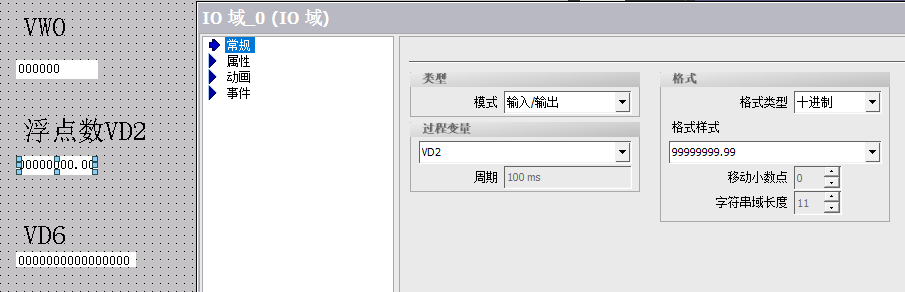
图12
3、Smart line - IE V3 项目下载
参照附件《smart v3面板常见问题集》中的项目下载,如图13所示。
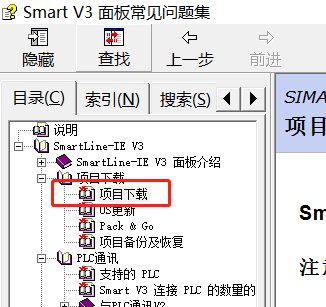
图13
三、PLC从站程序编写
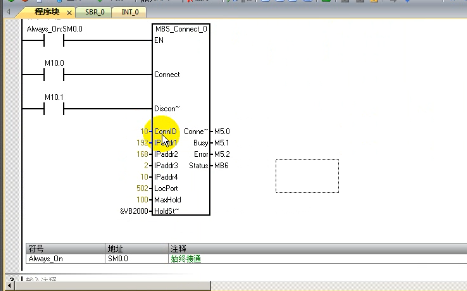
打开STEP 7-MicroWIN SMART 软件中找到modbus rtu从站库,然后编写modbus rtu从站程序,如图14所示。需要注意给库存储区分配地址,在程序块中的库右键选择库存储区分配,如图15所示。
程序编写好下载到PLC中,PLC切换至运行模式。
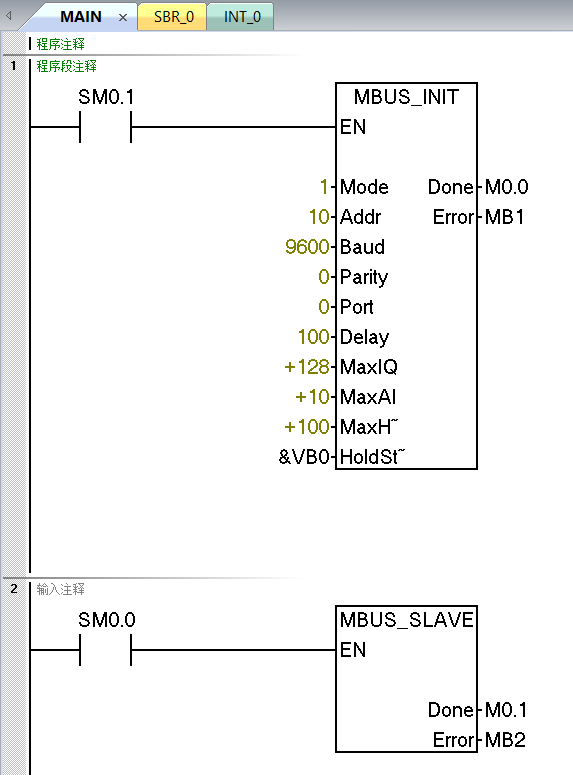
图14
“模式”(Mode)输入的值用于选择通信协议:输入值为 1 时,分配 Modbus 协议并启用该协议;输入值为 0 时,分配 PPI 协议并禁用 Modbus 协议。
参数“地址”(Addr)将地址设置为 1 至 247 之间(包括边界)的值。
参数“波特”(Baud)将波特率设置为 1200、2400、4800、9600、19200、38400、57600 或 115200。
参数“奇偶校验”(Parity)应设置为与 Modbus 主站的奇偶验校相匹配。所有设置使用一个停止位。接受的值如下:0(无奇偶校验)、1(奇校验)和 2(偶校验)。
参数“端口”(Port)设置物理通信端口(0 = CPU 中集成的 RS-485,1 = 可选信号板上的 RS-485 或 RS-232)。
参数“延时”(Delay)通过使标准 Modbus 信息超时时间增加分配的毫秒数来延迟标准 Modbus 信息结束超时条件。
在有线网络上运行时,该参数的典型值应为 0。如果使用具有纠错功能的调制解调器,则将延时设置为 50 至 100 ms 之间的值。
如果使用扩频无线通信,则将延时设置为 10 至 100 ms 之间的值。“延时”(Delay) 值可以是 0 至 32767 ms。
参数 MaxIQ 用于设置 Modbus 地址 0xxxx 和 1xxxx 可用的 I 和 Q 点数,取值范围是 0 至 256。值为 0 时,将禁用所有对输入和输出的读写操作。建议将 MaxIQ 值设置为 256。
参数 MaxAI 用于设置 Modbus 地址 3xxxx 可用的字输入 (AI) 寄存器数,取值范围是 0 至 56。值为 0 时,将禁止读取模拟量输入。建议将 MaxAI 设置为以下值,以允许访问所有 CPU 模拟量输入:
u0(用于 CPU CR20s、CR30s、CR40s 和 CR60s)
u56(所有其它 CPU 型号)
参数 MaxHold 用于设置 Modbus 地址 4xxxx 或 4yyyyy 可访问的 V 存储器中的字保持寄存器数。例如,如果要允许 Modbus 主站访问 2000 个字节的 V 存储器,请将 MaxHold 的值设置为 1000 个字(保持寄存器)。
参数 HoldStart 是 V 存储器中保持寄存器的起始地址。该值通常设置为 VB0,因此参数 HoldStart 设置为 &VB0(地址 VB0)。
也可将其它 V 存储器地址指定为保持寄存器的起始地址,以便在项目中的其它位置使用 VB0。Modbus 主站可访问起始地址为 HoldStart,字数为 MaxHold 的 V 存储器。
MBUS_INIT 指令完成时,“完成”(Done) 输出接通。
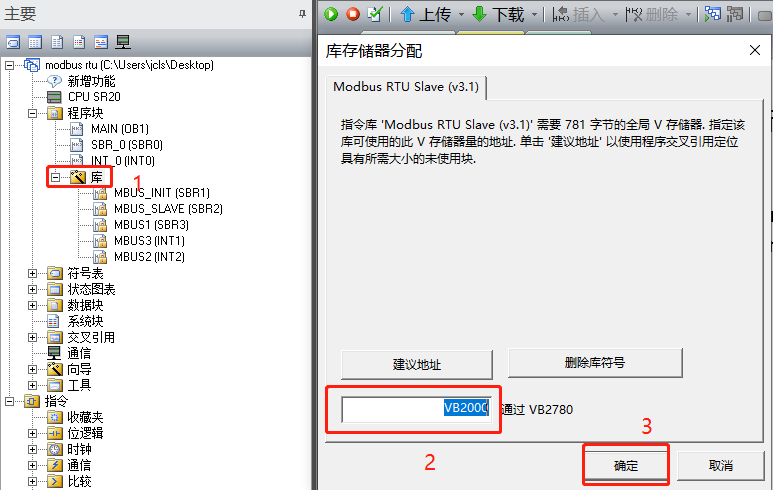
图15
四、连机测试
如图16所示,触摸屏与PLC已经通讯成功,数据实现交换,图17为200 SMART PLC从站数据。
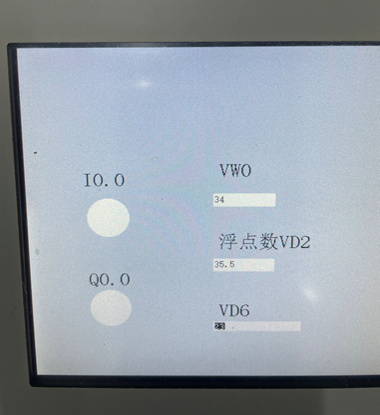
图16
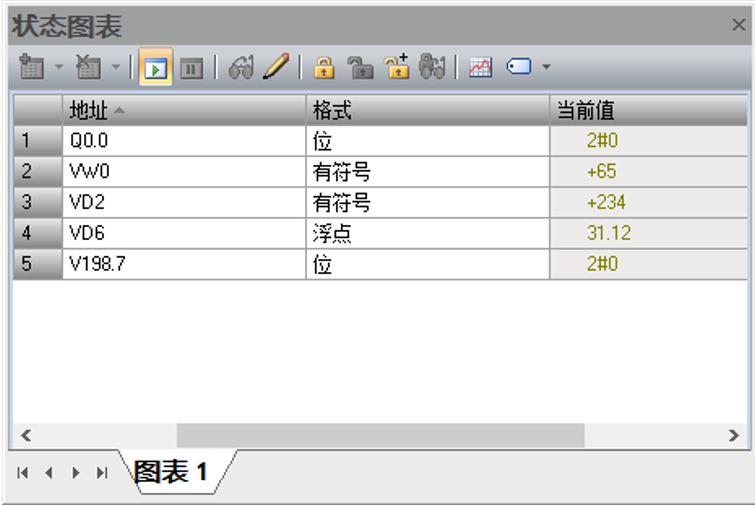
图17
总结:
以上就是整个西门子S7-200 SMART PLC与smart line触摸屏进行modbus rtu通讯连接的步骤。
审核编辑:刘清
-
plc
+关注
关注
5011文章
13290浏览量
463263 -
触摸屏
+关注
关注
42文章
2304浏览量
116174 -
ModBus通信
+关注
关注
0文章
32浏览量
2558
原文标题:西门子S7-200 SMART PLC与smart line触摸屏进行modbus rtu通讯连接,含源程序!
文章出处:【微信号:跟我学PLC,微信公众号:跟我学PLC吧】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【最新案例】西门子Smart触摸屏与西门子200PLC的无线通讯
S7-200SMART与S7-200的区别是什么
TPC7022Ex和s7-200 smart以太网通讯的配置过程
S7-200 Smart如何通过Modbus通信实现对V90的速度控制
winCC modbus TCP方式与S7-200 SMART PLC通信视频教程免费下载
MCGS(昆仑通态)与S7-200 SMART以太网通讯
S7-200 SMART如何下载程序?
组态王软件与S7-200SMART无线MODBUS通信

西门子PLC S7-200 SMART PID控制功能分享
S7-200 SMART PLC的应用案例
西门子Smart line系列触摸屏如何与S7-1200PLC的时间同步





 工商网监
工商网监
评论