 何为滤波?粒子滤波是怎么来的?
何为滤波?粒子滤波是怎么来的?
一、前言
粒子滤波(particle filter)是一种常见的滤波算法,广泛应用于目标跟踪、移动机器人等领域。网络上有不少关于粒子滤波的资料,但大多是直接给出了粒子滤波的相关公式和证明,或较为直观上的解释。作者在学习粒子滤波的过程中对一些概念和操作时常感到突兀,后来发现想要完整了解粒子滤波,需要首先了解前因,逐渐深入才能理解粒子滤波,而不是直接学习粒子滤波这个方法。
本文将侧重从“粒子滤波是怎么来的”这个问题介绍粒子滤波。限于篇幅与易懂性,对一些概念并没有展开介绍,读者在了解基本思路后可以根据给出的资料深入学习。本文包含了作者自己不严谨的理解与阐述,如有疏漏,望批评指正。
二、对“滤波”的一些介绍
2.1 何为“滤波”?
贝叶斯滤波、卡尔曼滤波、粒子滤波……种种这些滤波方法,都涉及到了“滤波”这个词。那么到底什么是滤波,不同的领域有不同的定义。比如在信号系统领域,滤波是指将信号中特定波段的频率滤除的操作。而在移动机器人领域,我暂时没有看到较为严格的定义。我认为可以姑且理解为:通过不断地观测,使得对目标状态的估计变得更加准确。
2.2 贝叶斯滤波
卡尔曼滤波与粒子滤波都是基于贝叶斯滤波框架下的滤波算法。讲粒子滤波便不得不提贝叶斯滤波。贝叶斯滤波的基本思想是根据上一时刻的状态对当前状态进行预测,并根据此时的观测进行更新。基本算法是: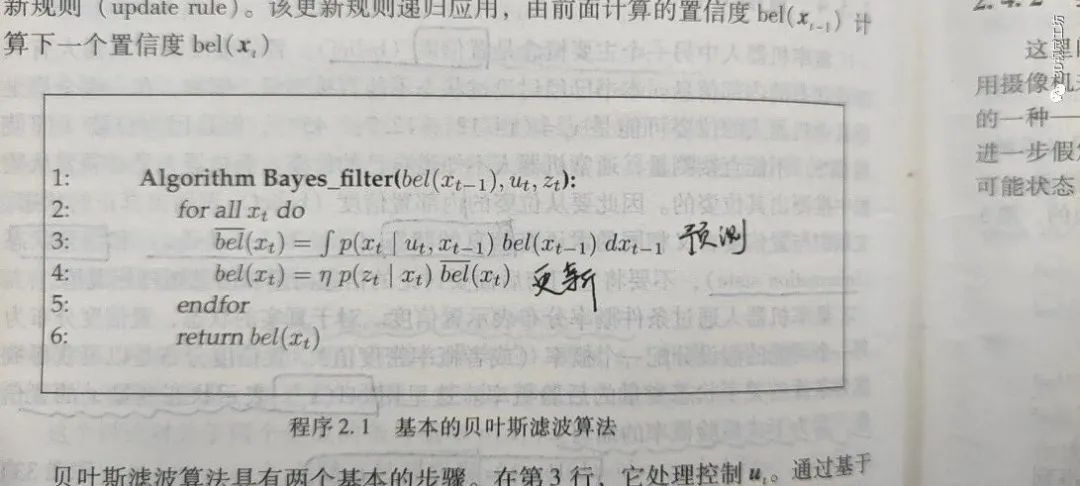
(图片来源:《概率机器人》) 可以看出,在预测部分需要求一个积分,而这个积分往往很难求。所以显有方法可以直接利用原始的贝叶斯进行处理。
2.3 卡尔曼滤波
卡尔曼滤波也是非常庞大的一块内容,这里不展开介绍。只在这里说明,卡尔曼滤波是贝叶斯滤波在线性高斯系统下的一种滤波算法。而对于非线性系统,则衍生出来了扩展卡尔曼滤波。同时指出,无论是卡尔曼还是扩展卡尔曼滤波,都是参数化的滤波方法,对于无法用参数化进行表示的,则采用粒子滤波。粒子滤波是一种无参的滤波算法。
三、积分计算:从蒙特卡洛说起
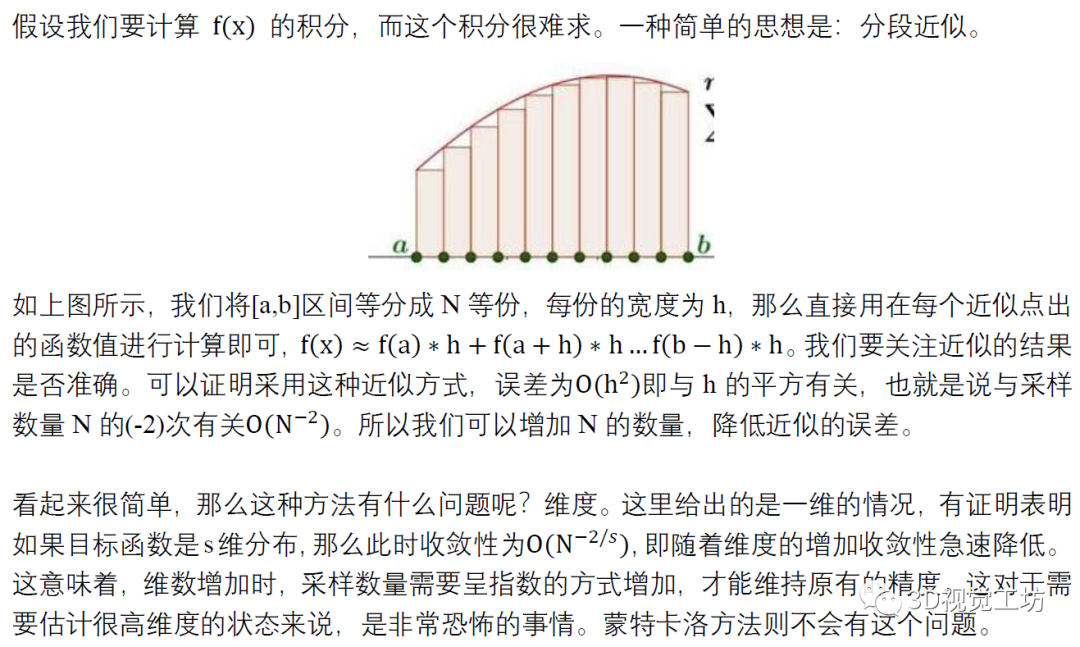
3.1 分段近似法求积分
3.2 蒙特卡洛采样求积分
(此处略过蒙特卡洛基本原理)
3.2.1 简单的均匀采样
求积分和求期望是相同的。假设我们对一个分布求取积分,采用最简单的采样方式——均匀采样。我们求取在x满足均匀分布u(x)时,f(x)在[a,b]的期望I。按照分布u(x)进行N次随机采样:

可以发现最后一项对f(x)的积分,就是x的期望。所以我们可以发现,当我们按照均匀分布u(x)对x进行大量采样,计算对应的f(x)的平均值,就是f(x)的积分。
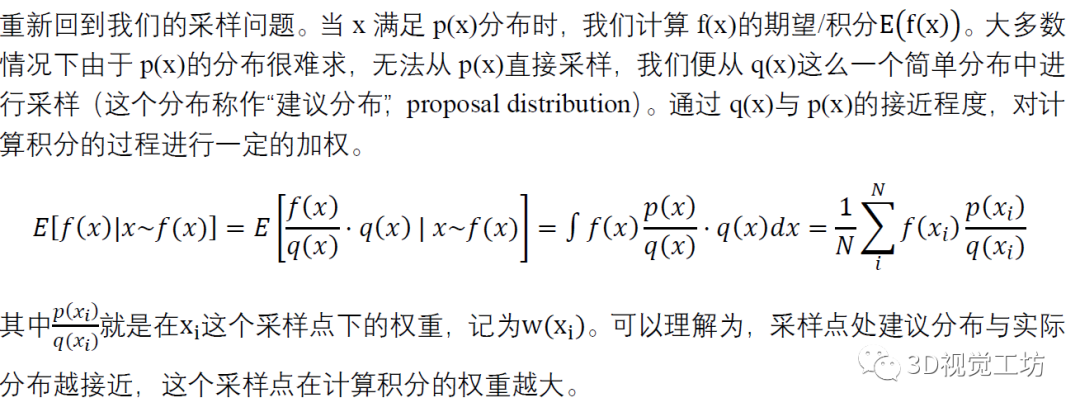
3.2.2 任意分布的采样
下面我们研究,如果不是按照均匀分布u(x)采样,而是任意分布p(x)进行采样,结果如何。此时

依旧与原始的积分相同。所以我们得出了重要的结论:在蒙特卡洛时,我们可以按照任意分布进行采样,再计算对应f(x)的积分。

这一点很好理解,如果我们选择的分布p(x)就是真实的分布,那么我们从p(x)进行采样,就和直接从真实分布进行采样是一样的,积分结果当然是没有误差的。这提醒我们,在选取p(x)分布时要尽可能的与实际分布接近,从而极大程度的降低方差,从而减少需要采样的数量。
四、重要性采样与序列重要性采样
4.1 重要性采样(Importance Sampling, IS)
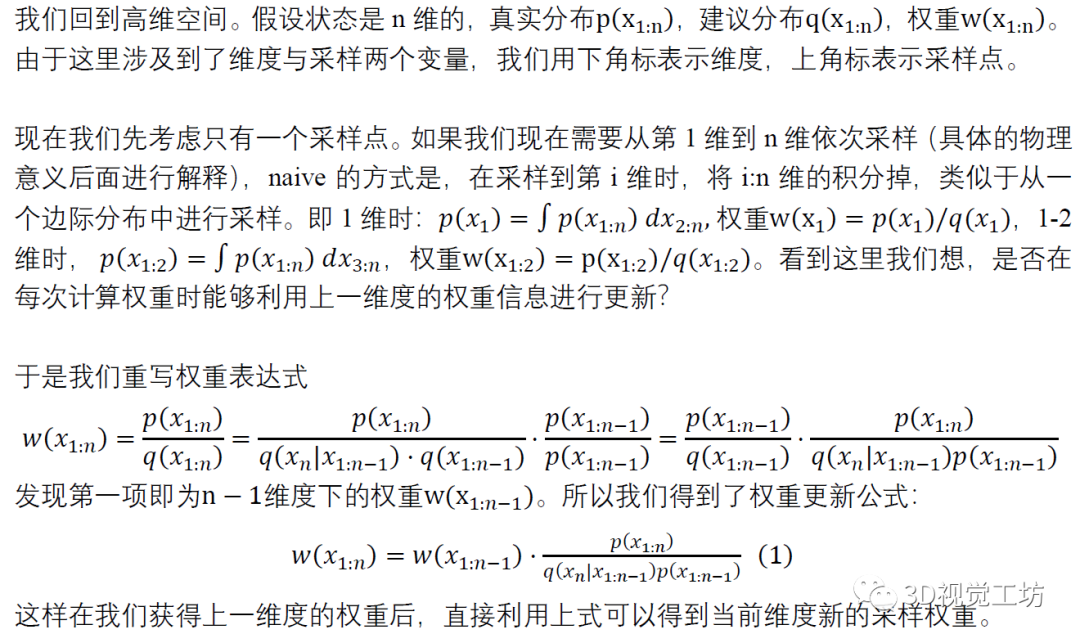
4.2 序列重要性采样(Sequential Importance Sampling, SIS)

4.3 重采样(Resampling)
在实际过程中,我们发现利用权重更新公式进行更新时,在几次迭代之后,权重的分布会极其不均匀,出现个别粒子权重很大接近于1,而其他的都接近于0的情况。这时候采用了一种“重采样”策略,即每次权重更新之后,根据当前权重对所有粒子进行重采样,之后将所有权重设定为相同。这样我们用粒子的数量代替了粒子的权重,避免了权重的不均匀。
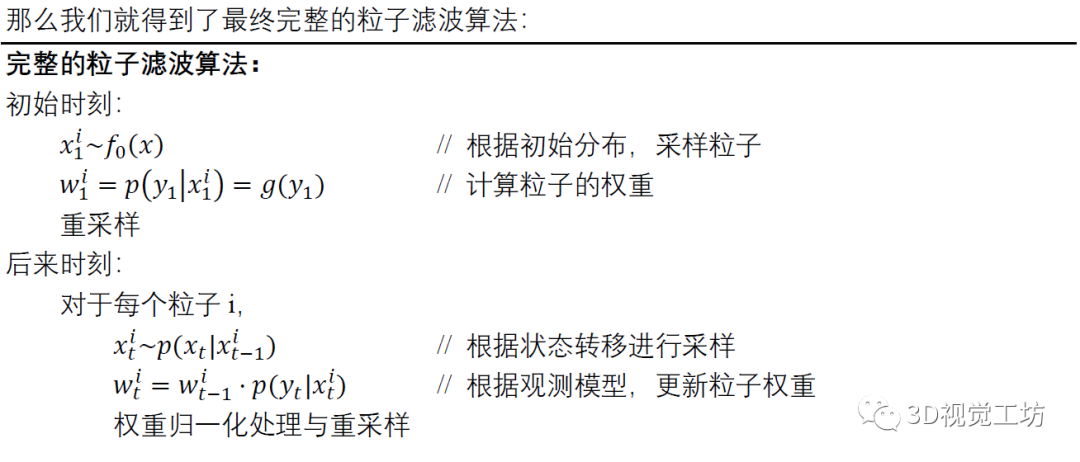
5. 粒子滤波(Particle Filter)
此时对权重更新公式进行变形(在不产生歧义情况下部分内容用点省略):
6. 总结
本文首先从滤波问题说起,指出了贝叶斯滤波框架下积分很难求的问题。由此引出蒙特卡洛方法。之后为了降低误差、减少运算量和避免权重集中,对应出现了重要性采样、序列重要性采样与重采样,顺理成章的得出了粒子滤波的数学原理,之后给出了对应的物理模型。最后给出了简单的粒子滤波的完整算法。
审核编辑:刘清
-
滤波算法
+关注
关注
2文章
89浏览量
13723 -
贝叶斯算法
+关注
关注
1文章
7浏览量
9069
原文标题:粒子滤波到底是怎么得到的?
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高斯滤波和均值滤波的区别
高斯滤波和双边滤波的区别
emi滤波器是什么滤波器
陷波滤波器怎么进行滤波
贝叶斯滤波和卡尔曼滤波的区别
高通滤波器和低通滤波器判别方法
滤波器滤波的本质:信号时频特性的选择与处理|维爱普电源滤波器

来聊聊有源滤波和无源滤波吧






 工商网监
工商网监
评论