 其域创新手持激光雷达/手持SLAM三维重建设备亮相深圳
其域创新手持激光雷达/手持SLAM三维重建设备亮相深圳
10月30日,第6个“深圳人才日”即将到来之际,其域创新亮相“南山人工智能人才发展论坛”产品供需对接展,并在新品发布会期间展示手持三维实景实时重建设备——灵光Lixel L1,以及三维重建后的深爱人才馆,受到参会领导、媒体及市民观众的广泛关注。
本次“南山人工智能人才发展论坛”由深圳市委组织部(市人才工作局)指导,南山区委组织部(区人才工作局)主办,邀请了市、区领导,人工智能领域专家人才,市区高层次人才代表,高校院所和重点企业代表等约100人出席。
应论坛邀请,其域创新对深圳市人才公园进行了三维扫描与重建。参观公司展台期间,市领导详细询问了其域创新的发展现状,深入了解了产品配置、参数、性能等具体情况,并肯定了灵光Lixel L1在市政、城管、公安等领域的应用前景。
作为扎根深圳南山的创新型企业,其域创新专注于三维技术研发和服务提供,坚持自主可控、软硬一体的技术方案,助力建筑、影视、娱乐、游戏、智能制造、数字孪生等领域的3D内容快速生成与应用。
目前,其域创新正在通过提供三维技术服务,参与各地数字新基建建设,推动三维化、虚拟现实等技术与重要领域的产业融合和规模化应用,服务经济社会高质量发展。
未来,其域创新将继续立足南山,踔厉奋发、笃行不怠,持续引进高端科技人才,主动融入南山区建成世界级创新型滨海中心城区、勇当深圳建设中国特色社会主义先行示范区标杆的发展大局,为南山发展、深圳发展贡献中国原创科技力量。
*三维重建在数字城市场景下应用空间巨大。通过对实景三维重建技术的应用,实现城市大数据整体、个别建筑或物件的三维实物模型可视化,可以为城市信息管理系统及智慧城市解决方案上层应用提供实景三维底图平台。尤其是其域创新提供i的实时三维重建,在应急管理、地灾调查、消防救援等方面作用突出。
手持SLAM、移动激光扫描系统主要由激光扫描仪、惯性导航系统及相机组成,用于测量点的三维坐标和激光反射强度,相机用于测量点的三维坐标和颜色信息。根据移动激光扫描系统和数码相机采集的数据可以得到点云数据,包括三维坐标、激光反射强度、颜色信息。
Simultaneous Localization And Mapping,简称SLAM,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。目前SLAM主要的两种形式是:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
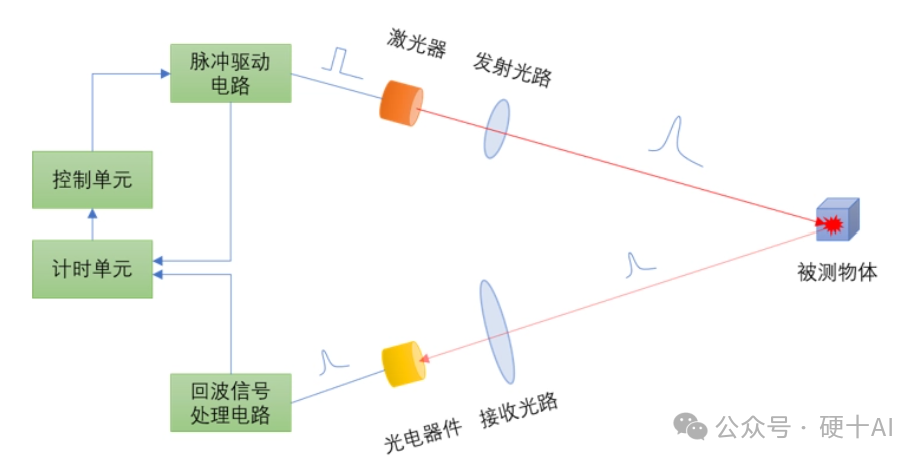
手持激光雷达、手持SLAM设备的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到周围障碍物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了自身的定位。激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使测量和计算变得直观简单。
审核编辑黄昊宇
-
激光
+关注
关注
19文章
3201浏览量
64479 -
雷达
+关注
关注
50文章
2936浏览量
117541
发布评论请先 登录
相关推荐
思看科技手持三维激光扫描仪三种工作模式介绍

激光雷达在SLAM算法中的应用综述

激光雷达的工作原理和分类
激光雷达技术的基于深度学习的进步
激光雷达在农业中的创新应用
留形科技借助NVIDIA平台提供高效精确的三维重建解决方案
爱普生IMU产品在激光雷达测绘中的应用

激光距离选通三维成像技术研究进展综述

黑科技来袭!激光雷达在线监测装置,让输电线路运维无忧
手持式激光三维扫描仪原理和应用

华为详细解读激光雷达
车载激光雷达到底安不安全?

泰来三维|如何轻松玩转三维扫描仪中手持快速扫描模式

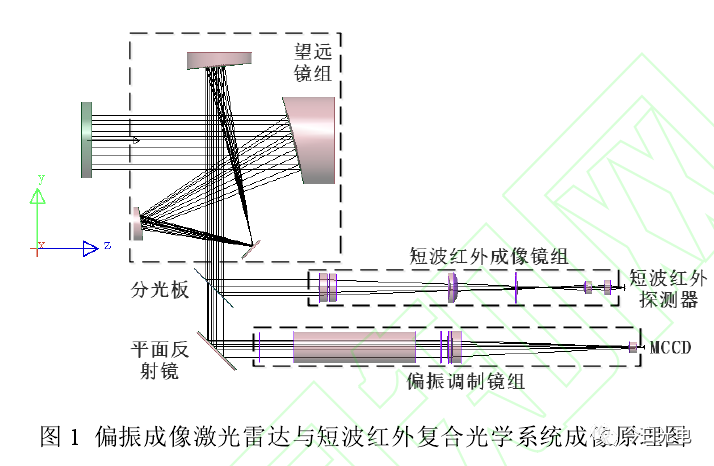
偏振成像激光雷达与短波红外复合光学接收系统设计与分析介绍





 工商网监
工商网监
评论