 Global SfM和ncremental SfM知识讲解
Global SfM和ncremental SfM知识讲解

3D视觉的核心问题是恢复场景结构、相机位姿、和相机参数,而解决方式有两种,一种是off-line的sfm(structure from motion),一种on-line的slam(simultaneous localization and mapping)。Slam 与sfm的区别在于,大多数slam系统是需要提前标定相机,而sfm 则不需要提前标定(通常所说的三维重建和slam的区别,严格意义上应该是sfm 和slam的区别)。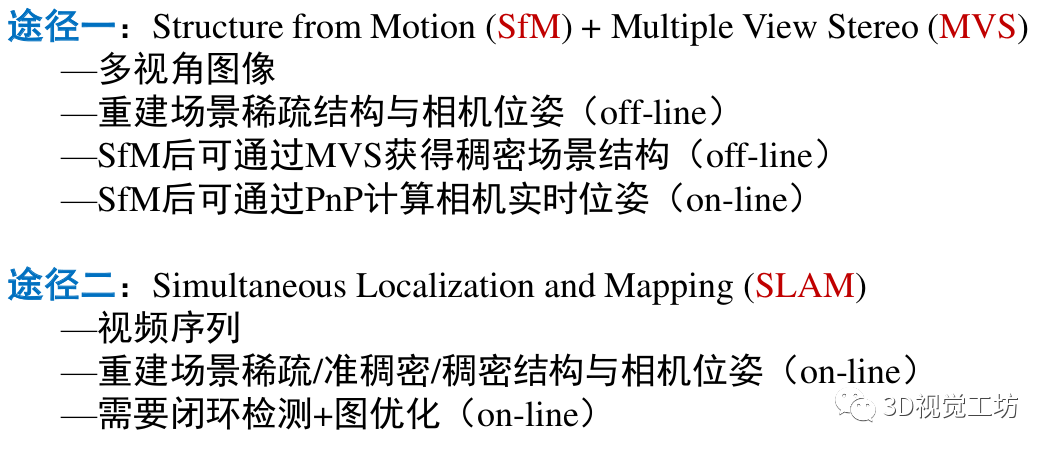
Sfm 可以分为以下几类:Global SfM、Incremental SfM、Hybrid SfM、Distributed SfM,这里主要讲解Global SfM和ncremental SfM(主要集中在global sfm)。
一、Global SfM workflow:
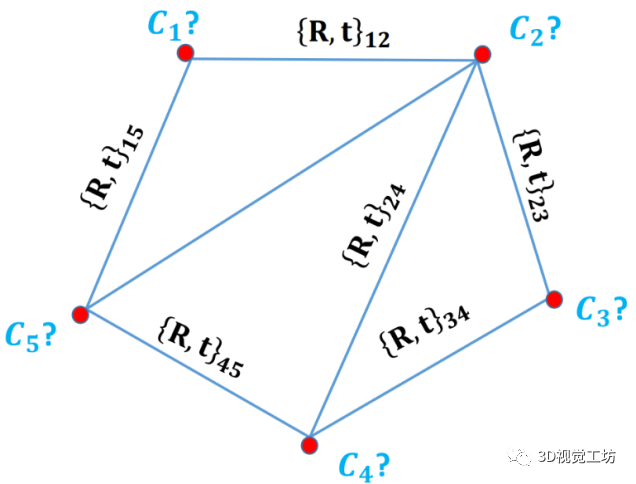
Global sfm 的内容包括rotation averaging 和anslation averaging。
Rotation averaging
观测值:一组相机pose的相对rotation
目标:计算相机的绝对旋转
优化:L2范数,采用L2范数的原因有两个:1)估计一个好的旋转初始值 2)收敛快
理论基础: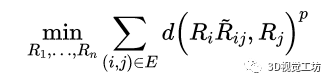
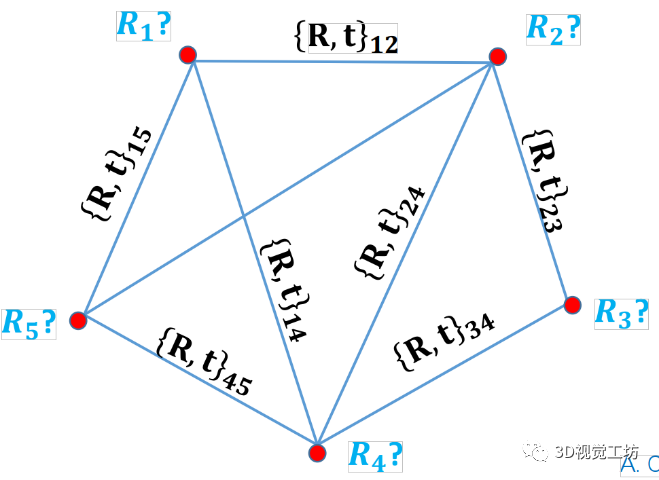
translation averaging
观测值:同rotation averaging 一样,观测值是两一组pose之间的相对translation
目标:计算相机的绝对旋转
优化:L1范数,原因是L1 范数对噪声鲁邦
理论基础: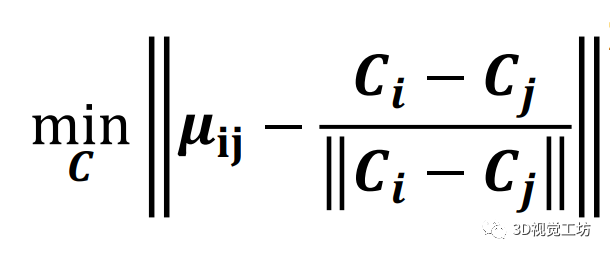
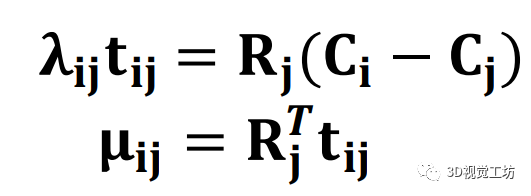
Translation averaging 在global sfm 中计算困难,原因如下:
1、 两视图之间的运动不能恢复尺度(tvec 是从本质矩阵中恢复出来的,但是本质矩阵的秩是5,不包含尺度,所以global sfm 是属于三焦张量问题,即是至少tack 3帧才能进行运算。同时,global sfm 容易出现退化现象,当相机都处于同一条线上时候,对于无人机图像来说,这个时候轨迹就会出现bending map。
解决bending map 的手段有三点:
(1)提前对相机标定
(2)以无人机为例,飞行航线不要在恒定高度上飞行
(3)融合其他传感器,如gps 位置约束等 退化的case 如下: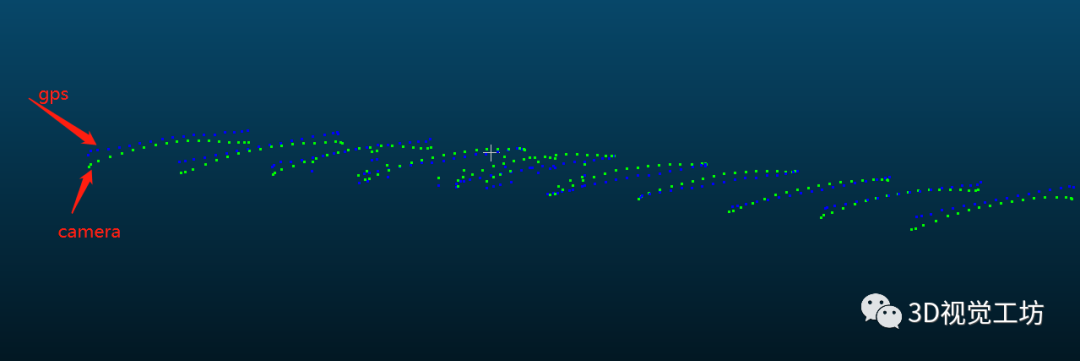
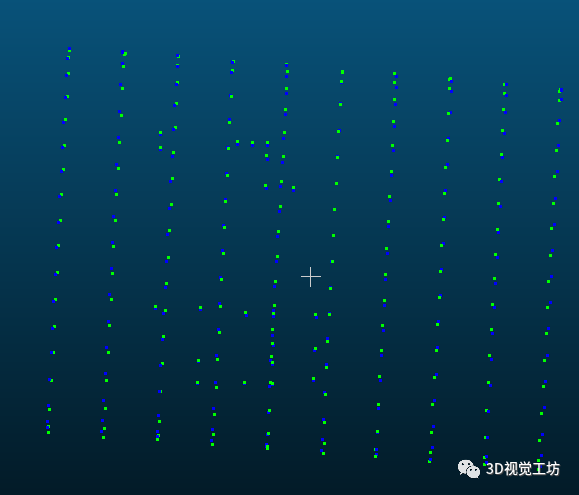
以上分别为侧面图和俯视图 以上结果是fusion low-cost gps的效果,但是依旧可以看出有弯曲的现象(不融合的效果特别差) 飞行方式改变,fusion low-cost gps,退化现象消失,如下:
从侧面图和俯视图可以看出,当飞行方式发生改变,global sfm 退化现象消失。
2、 global sfm translation averaging第二个的痛点是对噪声敏感,其不像Incremental sfm,不断的ransac 和local ba 来减少bad EGs的影响。 如何去改善global sfm 的鲁棒性:
1)如果rotation 是已知的(不够精确),提供global rotation初始值给global sfm pipeline ,利用这些初始值在BA中增加relative rotation constraint
2)如果位置已知,sfm 增加位置约束,即最小化先验位置和估计的位置之间的gap,位置约束可以替代slam回环(如果是low cost gps ,位置约束不能保证精度,但可以起到一个control strcture 的作用(AR 常用)—参考vins-fusion思想 ,这个openmvg 中已经实现位置约束。
二、Incremental SfM workflow:
增量sfm这里不准备太多的叙述,需要注意的是初始化选择像对的基准:
enough matching
big baseline
三、global sfm和incremental sfm 优缺点和应用场景
应用场景:
1.当考虑速度不考虑精度的时候,并且当图像overlap 比较大的时候,用global sfm 可以达到理想效果,因为有更多的数据去average(Feature track based translation averaging)
2.如果考虑精度,选择Incremental sfm ,但是在大场景下,incremental sfm会随着图像的增多,速度越来越慢,同时由于误差的累计,会出现drfit ,这种情况下可以采用Distributed SfM。
审核编辑:刘清
-
无人机
+关注
关注
237文章
11390浏览量
196773 -
SLAM
+关注
关注
24文章
460浏览量
33426 -
3D视觉
+关注
关注
4文章
491浏览量
29327
原文标题:三维重建的定位定姿算法
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
鸿蒙智能体开发知识库---创建知识库
RGB时序灯条的工作原理讲解
崇达技术斩获Fineline Global 2025年度两项荣誉
保偏跳线知识讲解
罗克韦尔自动化助力Utility Global加速能源转型
锐宝智联亮相GITEX GLOBAL 2025

A25:MCU系统器件知识与应用专题--MCU、EEPROM/FLASH和晶体/晶振知识及应用案例
广电计量与CBQA Global达成战略合作


A21:分立元件知识与应用专题--电阻知识及应用案例
SFM3000系列气体流量传感器选型指南




评论