 【产品应用】手把手带你使用ZMC300E绘图
【产品应用】手把手带你使用ZMC300E绘图
 前言
前言
ZMC300E(点击了解详情)是广州致远电子股份有限公司开发的最新一代智能总线型 EtherCAT 主站控制器,使用A8内核的AM335X为处理器核心,配合Xenomai高实时性Linux系统,支持作为EtherCAT主站使用,其通讯可实现ms周期任务抖动±15μs以内,可满足运动控制器的高实时性要求。
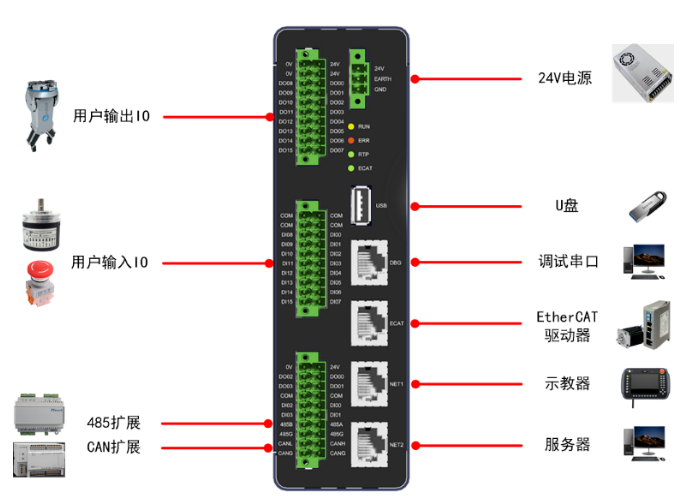 图1ZMC300E控制器
图1ZMC300E控制器可以看到,运动控制器的强项是EtherCAT实时通信,主要工作就是发号施令,通过网络命令多个电驱和电机工作。通俗的说,运动控制器干脑力活,动口不动手,电驱和电机干体力活,专干重活累活。
那么,运动控制器凭什么当上智力担当的?原来运动控制器是计算能手,拥有三大绝活算法:轨迹插补,速度规划,运动前瞻。凭借这三大绝活,运动控制器就能指挥电驱和电机完成各种运动任务。
算法原理
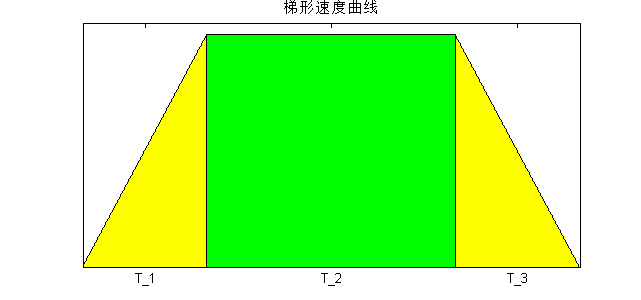
该速度由3段组成,第一个段黄色段是加速段,第二段(绿色段)是匀速段,第三段(黄色段)是减速段。
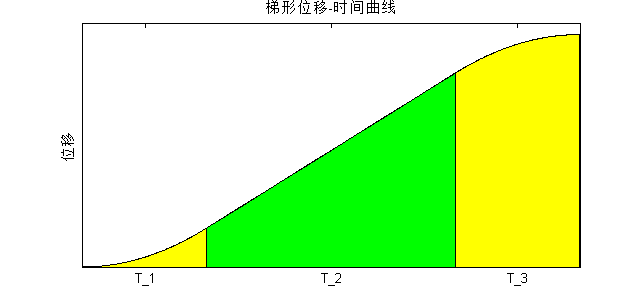
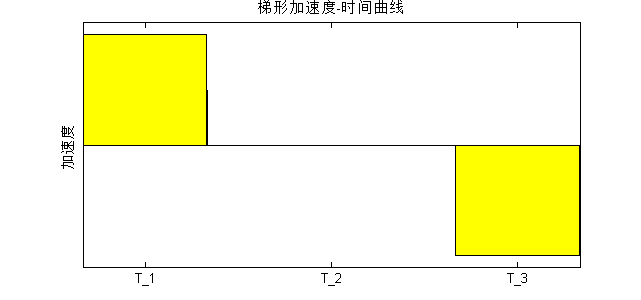 图5梯形速度规划-加速度示意图
图5梯形速度规划-加速度示意图除了梯形速度规划,ZMC300E还支持多种S型速度规划:加加速度(二次加速度)给定条件的S型速度规划,弯曲时间给定条件的S型速度规划,和加减速时间和弯曲时间给定条件的S型速度规划。
3.运动前瞻运动控制器能够更加高效规划运动,这要求运动控制器支持连续插补运动,支持运动前瞻。
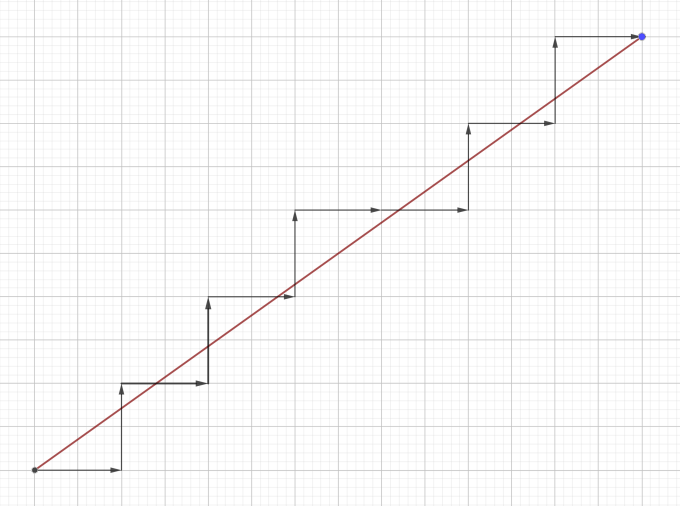
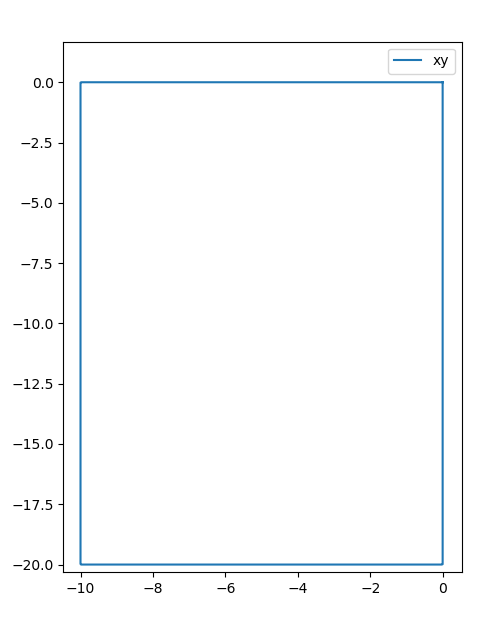
这里给一个矩形绘图作为连续插补的示例。一个普通的矩形轨迹如下图。
使用梯形速度规划,可以得到以下的速度曲线,可以看到,由4段曲线组成。
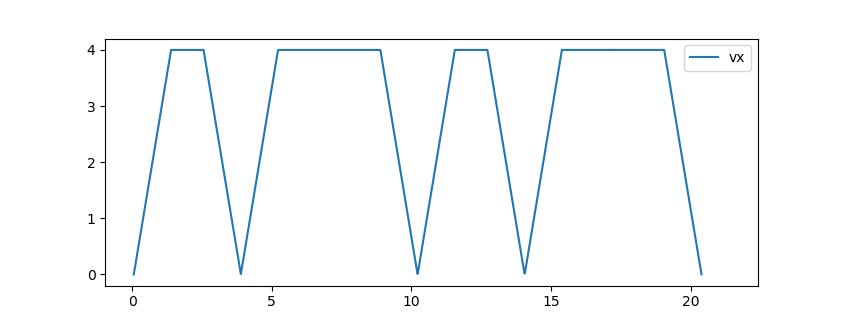 图7不开启运动前瞻的速度-时间示意图不开启连续插补和运动前瞻,每段速度都减速到零。纵轴为速度,横轴为时间。下图是开启连续插补的速度-时间图。速度是通过位置和发射时间推算出来的,不完全精确,速度出现毛刺是正常的。
图7不开启运动前瞻的速度-时间示意图不开启连续插补和运动前瞻,每段速度都减速到零。纵轴为速度,横轴为时间。下图是开启连续插补的速度-时间图。速度是通过位置和发射时间推算出来的,不完全精确,速度出现毛刺是正常的。
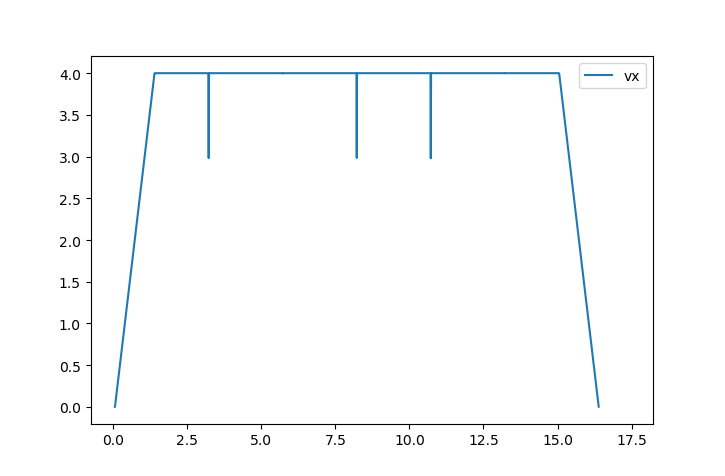
开启连续插补,每段速度不再减速到0。可以看到,时间相比不开启运动前瞻更短。但是有个严重问题:拐角处的速度是最大值,过高的速度可能影响电机和刀具稳定性。
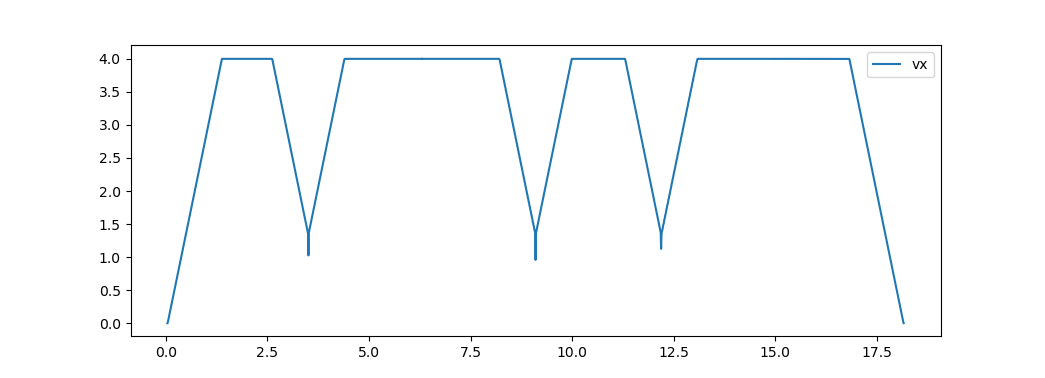
开启连续插补和运动前瞻,拐角减速,每段速度不再减速到0,而是根据拐角角度决定速度。可以看到,时间相比不开启运动前瞻更短,相比连续插补更长,避免刀具高速通过拐角处的问题。
运动控制器的运动前瞻功能可以根据用户的运动路径自动计算出平滑的速度规划,以防止轨迹的拐角处速度过快。运动前瞻包括三种模式:拐角减速、倒角、小圆限速,而这三种模式也可混合使用。拐角减速会根据夹角大小确定拐角处的最大速度,倒角则会设置前后两个轨迹在拐角处的倒角,而小圆限速则会对半径小于设置值的圆弧轨迹进行限速。
实战绘图
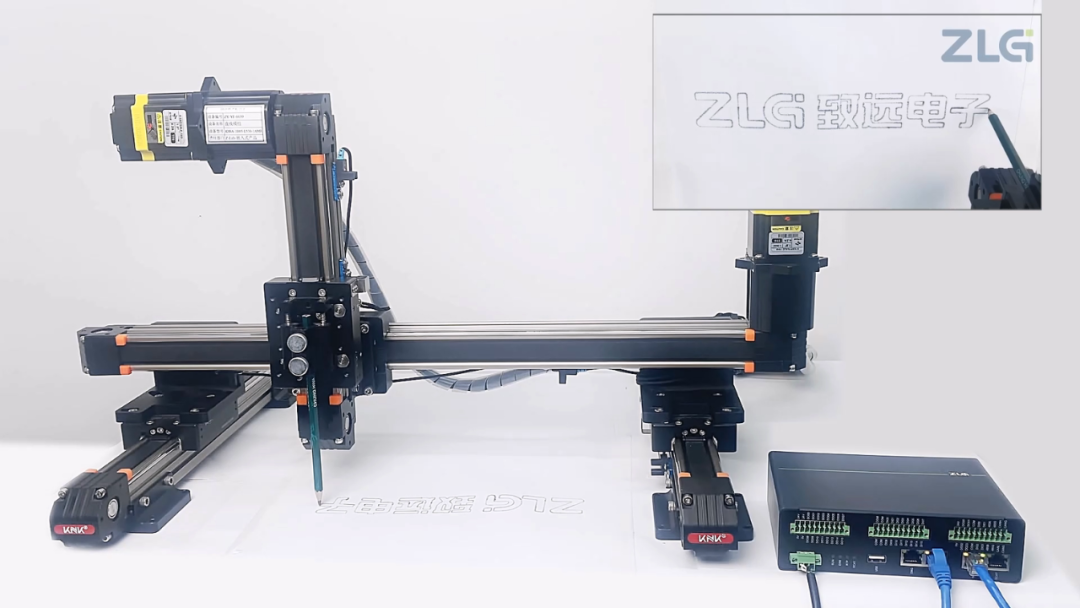
首先把运动控制器和画笔平台使用网线连接。画笔平台是一个3轴的龙门架,可以在xyz三轴空间移动,夹具上只有一根常见的铅笔。
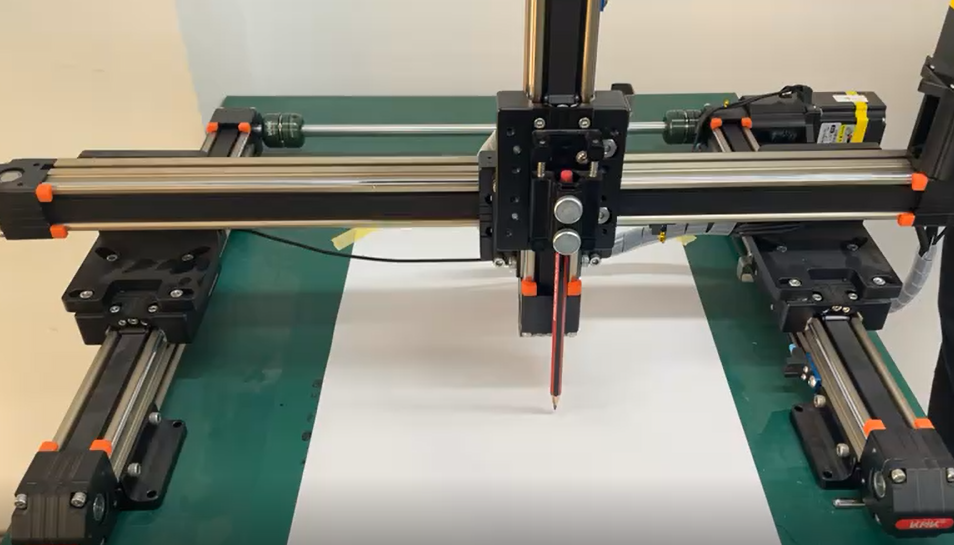
图10画笔平台
选择一幅SVG格式图片作为我们画图的图案,这里我们选择的是致远电子公司的logo图片。

图11Logo图片
对于输入图片,我们可以把矢量图解析成多个笔画,每个笔画解析成直线曲折相连,这样就可以得到对应绘图轨迹。G代码(G-code)是最为广泛使用的计算机数控编程语言,主要在计算机辅助制造中用于控制自动机床。
我们使用开源工具svg_to_gcode,把svg文件转成G代码文件。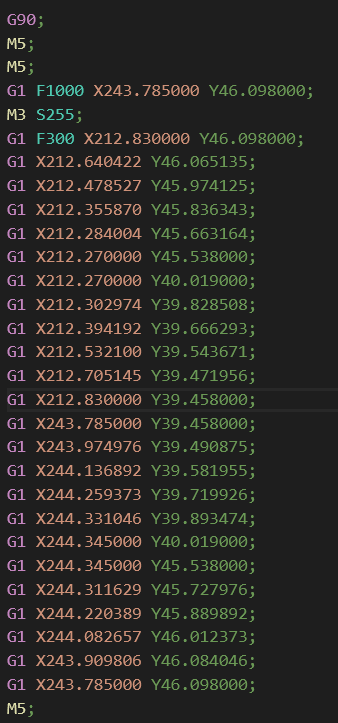
图12G代码文件
查看G代码文件,可以看到都是G1指令,说明都是直线插补命令。这说明我们只用直线插补命令就能完成绘图。对应的绘图图案如下,不同的颜色对应不同的笔划,可以看到图片包含十八笔的仿真笔画图。
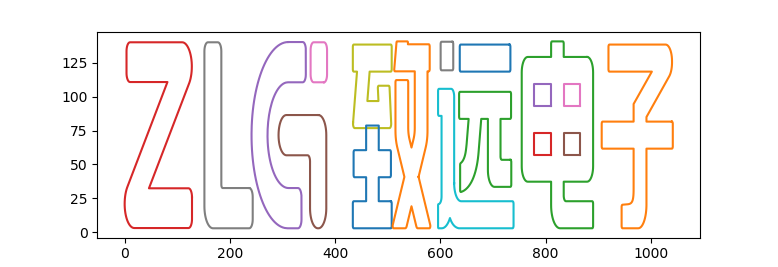
图13 笔画轨迹图片
每一笔划都要有进笔(笔尖触及纸张),作画(笔尖写字)和退笔(笔尖远离纸张)。G代码中进笔对应M3指令(进刀),退笔对应M5指令(退刀)。这样才能书写多个笔划。
目标图形总共有十八笔的笔画,要想作画就得先对笔画进行排序。这里使用最直观的笔划排序算法,先左后右,先上后下。
加入笔画的连接,可以得到以下的笔画仿真绘图。
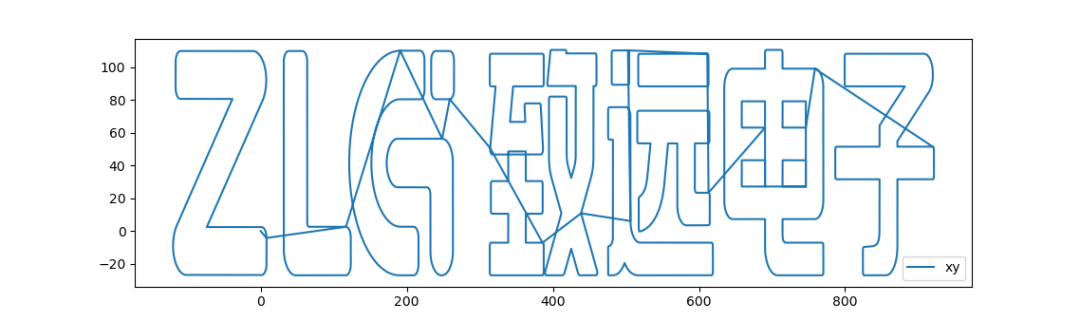
图14 连笔笔画绘图
可以看到,仿真效果大体上符合我们的预期。我们就可以在运动控制器中运行G代码脚本。使用ssh连接运动控制器,启动控制程序。设置左下方为原点,沿着纸张往右边写字,纸张宽度至少280mm,高度60mm。使用梯形速度规划,配置最大速度100mm/s,最大加速度和最大减速度为100mm/s^2。进笔和退笔,对应z轴上下的运动,进笔量和退笔量都设为10mm。为了提高绘图效率,开启了连续插补,运动前瞻和拐角减速。
原文标题:【产品应用】手把手带你使用ZMC300E绘图
文章出处:【微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
-
致远电子
+关注
关注
13文章
409浏览量
31472
原文标题:【产品应用】手把手带你使用ZMC300E绘图
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
手把手带你入门AWStudio运动控制编程

ZMC600E运动控制器直线和圆弧插补算法详解
《手把手教你做星闪无人机》即将开播,锁定15日晚七点!

《手把手教你做PC》课程即将启动!深开鸿引领探索KaihongOS笔记本电脑开发实战
ZMC600E运动控制器T型、S型速度规划详解
Air780E模组LuatOS开发实战 —— 手把手教你搞定数据打包解包

手把手教你通过宏集物联网工控屏&网关进行协议转换,将底层PLC/传感器的数据转换为TCP协议并传输到用户
工商业储能选型指南及参数详解

手把手教你在orcad中设置CIS元器件数据库,提高工作效率

手把手教你排序算法怎么写

手把手带你移植HAL库函数
ZMC900E控制器之ROS2环境安装指南
ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改





 工商网监
工商网监
评论