 使用以太网进行运动控制的三个理由
使用以太网进行运动控制的三个理由

以太网是工业应用中日益重要的网络
在运动控制方面,以太网、现场总线和其他技术(如外围组件互连)历来相互竞争,以处理工业自动化和控制系统中一些最苛刻的工作负载。运动控制应用需要确定性(保证网络将工作负载按时到达其预期节点),这是确保位置保持所必需的,这反过来又会停止驱动器的精度和适当的加速/减速,以及其他任务。
标准 IEEE 802.3 以太网在这方面从未达到标准。即使CSMA/CD数据链路层由于全双工交换和隔离冲突域而变得过时,它也缺乏可预测性。此外,典型堆栈中较高的 TCP/IP 复杂性并未针对实时流量的可靠交付进行优化。因此,现场总线以及带有基于 ASIC 的 PCI 卡的面向 PC 的控制架构一直是运动控制的流行解决方案。
从EtherNet/IP到EtherCAT的以太网解决方案以自己独特的方式解决了这些缺点。尽管如此,工业以太网在运动控制中远非占主导地位,尽管它与替代方案相比具有其他一些优势。让我们来看看为什么它可以而且应该在未来几年的竞争中占据一席之地的三个原因。®®
1. 趋同而不是复杂性
随着时间的推移,企业IT和工厂车间之间的互连不断增加,导致复杂的系统经常将标准以太网和工业以太网与现场总线混合在一起。例如,计算机可能利用:
用于与伺服系统通信的 SERCOS1
用于联网变频驱动器的 PROFIBUS®
用于故障安全现场总线通信的 SafetyBUS p
用于连接传感器的设备网络
以太网,通过网关访问,用于向最终用户发送数据
这样的网络很复杂,设置和维护成本也很高。每个协议都需要自己的实施过程、安装程序和培训。相比之下,以太网提供了将用于运动、安全等的不同网络融合到经济高效的基础设施上的可能性,这些基础设施相对容易布线,得到供应商的广泛支持,并且面向未来。
以太网提供了融合不同网络的可能性。
EtherNet/IP 协议举例说明了融合在实践中是如何工作的。集成的交换系统通过使用标准以太网技术(如 TCP/IP 和 UDP/IP)以及用于实现分布式时钟的 IEEE 1588 精确时间协议同步的 CIP Sync 等功能,可以适应商业和工业应用。2
2. 运动控制应用的确定性
运动控制依赖于精确的通信。这种精度得到了基于时隙的调度的支持,其中每个设备都有一个与其他设备通信的时间表。当这些伺服驱动器和控制器计算出各自的时序时,会计算控制功能的 ΔT 值。但是,如果数据传输变得不可预测,则可能会被抛弃,因此需要确定性来确保循环稳定性。
以太网可以支持工厂中要求苛刻的运动控制应用
IEEE 1588 在 EtherNet/IP 中的实施,在某些情况下通过直接安装在英特尔芯片上的加速器电路,只是以太网解决方案用于实施确定性的一种常见机制。EtherCAT的动态处理是运动控制应用如何实现始终如一的可预测性能的另一个例子。EtherCAT超越了基于PCI的集中式通信的严格物理限制,虽然速度很快,但机器处理单元和伺服处理器之间的距离仍然很短。®
“基于 EtherCAT 的分布式处理器架构具有带宽、同步和物理灵活性,可与集中控制的强大功能以及分布式网络的优势相匹配,”3Jason Goerges在2010年为Machine Design撰写的一篇文章中解释道。“事实上,一些使用这种方法的处理器可以控制多达64个高度协调的轴,采样和更新速率为20 kHz,包括位置、速度和电流环路,以及换向。
3. IIoT 的长期可行性
以太网自作为 LAN 技术开始以来已经经历了许多排列。虽然传统的现场总线组件目前以小规模制造,PCI风险正在走向过时的行业标准架构,但以太网继续发展,现在处于有利地位,可以为以IP为中心的工业物联网提供服务。
即将进行的改进,如时间敏感网络,将完善IEEE 1588并增强网络融合的可能性,也使以太网成为现在和未来运动控制的合理选择。这并不是说现场总线和PCI将会消失,只是随着自动化行业向IIoT迈进,以太网的优势将继续增加。
审核编辑:郭婷
-
驱动器
+关注
关注
54文章
9125浏览量
156853 -
以太网
+关注
关注
41文章
6268浏览量
181840 -
现场总线
+关注
关注
3文章
532浏览量
40130
发布评论请先 登录
车载以太网,速度直指Tbps?

SPE协议芯片如何让工业布线瘦身70%?三个实战案例告诉你


KSZ8851SNL/SNLI:单端口以太网控制器的卓越之选
德州仪器(TI)解读汽车区域架构中的 TSN:启用以太网环形架构和 AVB 分布式音频


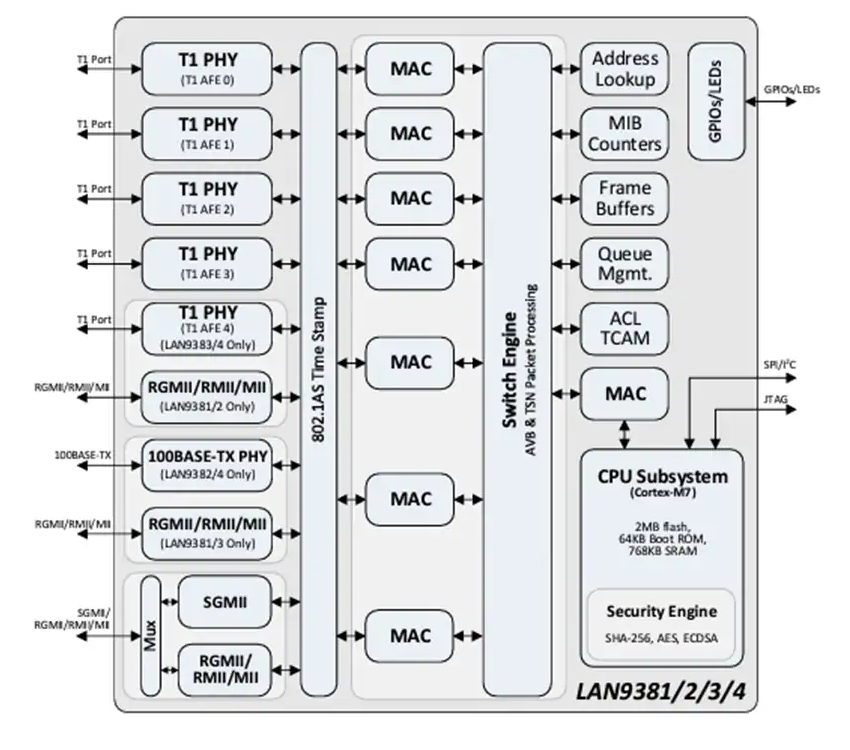
LAN938x系列以太网交换机的技术解析与汽车电子应用

以太网入门:从零开始,掌握以太网基础知识!
Microchip LAN9211-ABZJ 集成 10/100 以太网 PHY的以太网控制器

智多晶工业以太网从站控制器DEMO介绍





评论