 基于微流控和浸渍密封技术的微型机器人
基于微流控和浸渍密封技术的微型机器人
区别于传统药物递送方式,微型机器人可以提供时空可控的药物递送,从而提高疾病的治疗效率。近年来,随着微加工工艺的进步,可用于微型机器人的材料种类不断扩大,从而大大拓宽了其功能范围。然而,目前用于微型机器人的表面涂层或直接混合技术导致其装载效率低下,且对递送过程中的药物缺乏有效保护,从而导致所递送的药物出现浪费、异常降解和非特异性释放等情况。
近日,来自伦敦帝国理工学院的Molly M. Stevens教授团队基于微流控和浸渍密封(MLDS)技术实现了可填充微型机器人系统的制造。集成的微流控装载系统可实现高精确度装载,在提高物质装载能力的同时保持微型机器人的几何和结构完整性。此外,浸渍密封技术适用于包括热反应和光反应材料在内的不同材料。相关研究成果以“Assembly of fillable microrobotic systems by microfluidic loading with dip sealing”为题发表于Adv. Mater.期刊。
具体来看,该微型机器人由两个分别用于装载和密封的子系统组成,其制造过程分为5个步骤:1)将液体树脂滴在干净的玻璃基底上,并覆盖打印区域;2)优化打印参数,并在打印完成后,将基底依次浸泡在丙二醇单甲醚醋酸酯(PGMEA)和异丙醇(IPA)中,并去除多余的未固化树脂;3)利用微流控技术实现物质装载;4)使用浸渍密封工艺将完成填充的微型机器人封装起来;5)通过机械扰动将完成装载和密封的微型机器人阵列从玻璃基板上分离出来。
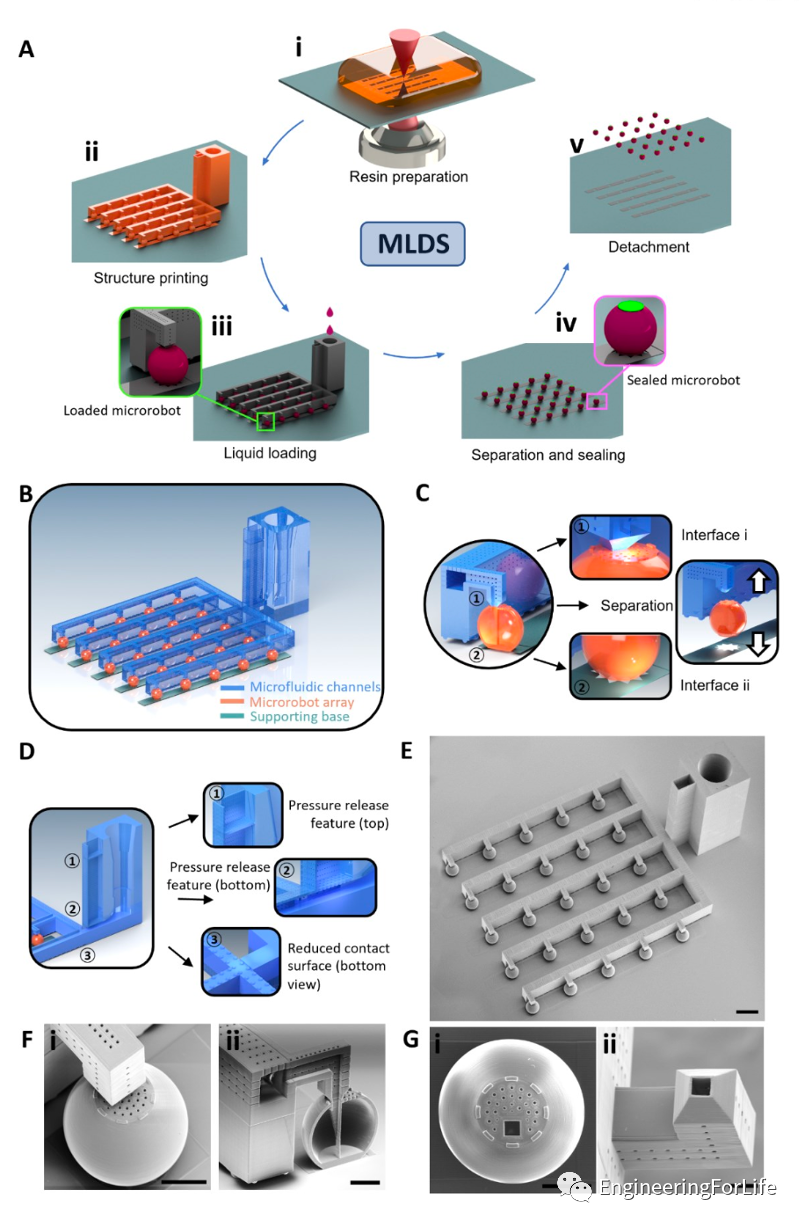
图1 通过MLDS技术设计和制造可填充的微型机器人平台
可控释放是一种有前景的药物递送的方式,可使目标区域的量最大化,从而避免系统的脱靶效应。该研究选择具有良好生物相容性的聚己内酯(PCL)作为密封层,其低熔点特性不仅可以方便浸渍密封,还可利用热触发机制来实现按需药物释放。
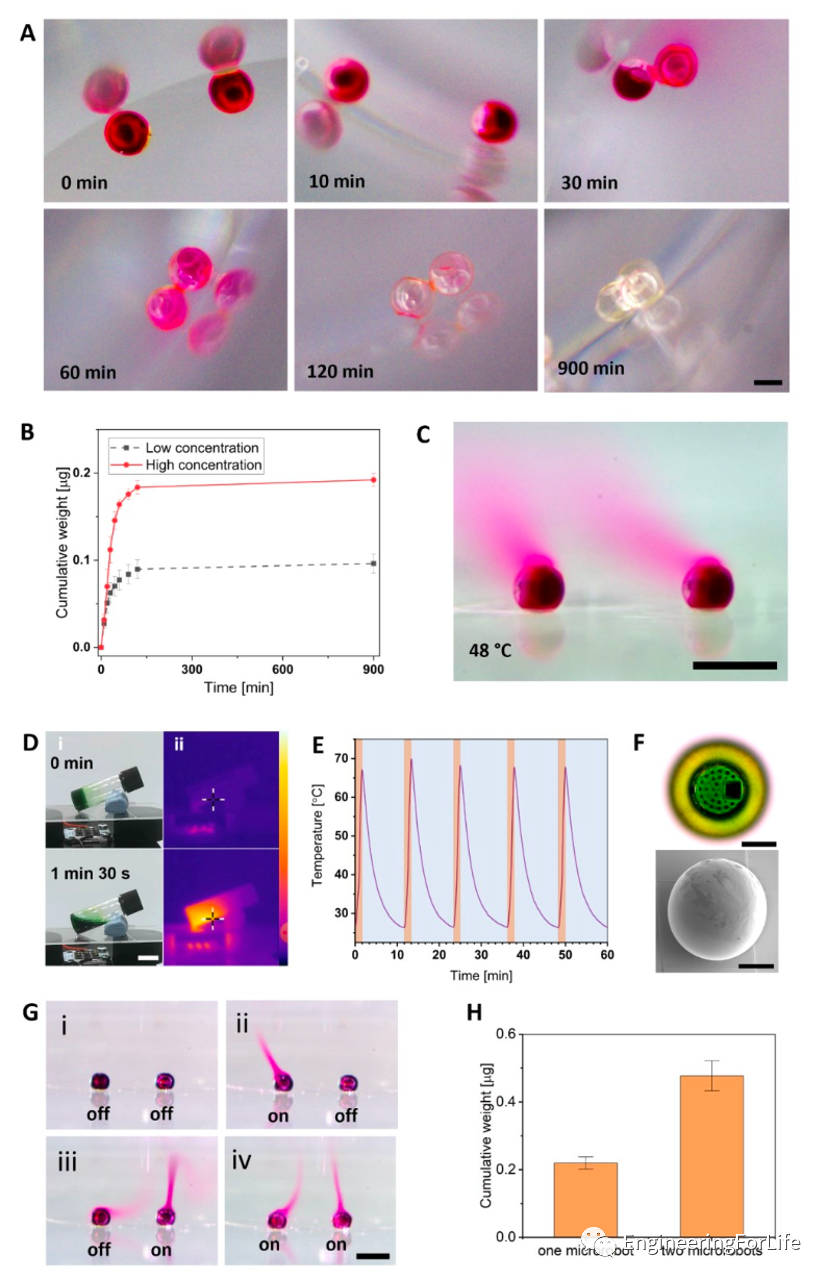
图2基于MLDS技术的微型机器人介导药物可控释放
除了由密封层介导药物的按需释放外,还可以通过磁场对微型机器人进行高分辨率和非侵入性的操纵,以实现靶向药物递送。在该项研究中,研究人员在微型机器人表面依次涂上镍(以促进磁响应行为)和钛(以改善生物相容性),以促进其在外部磁场下的精确驱动。此外,微型机器人的球形形状有利于滚动运动,从而利于其在类似管道的环境中运动。在外部施加的磁场影响下,微型机器人可以在流体溶液中沿着预定路径移动,到达目标部位后,通过近红外照射触发药物释放,以实现按需递送。此外,单个微机器人往往不能为治疗提供足够的药物,而可协同工作的人工"蜂群"机器人,可以保持较高的负载能力。
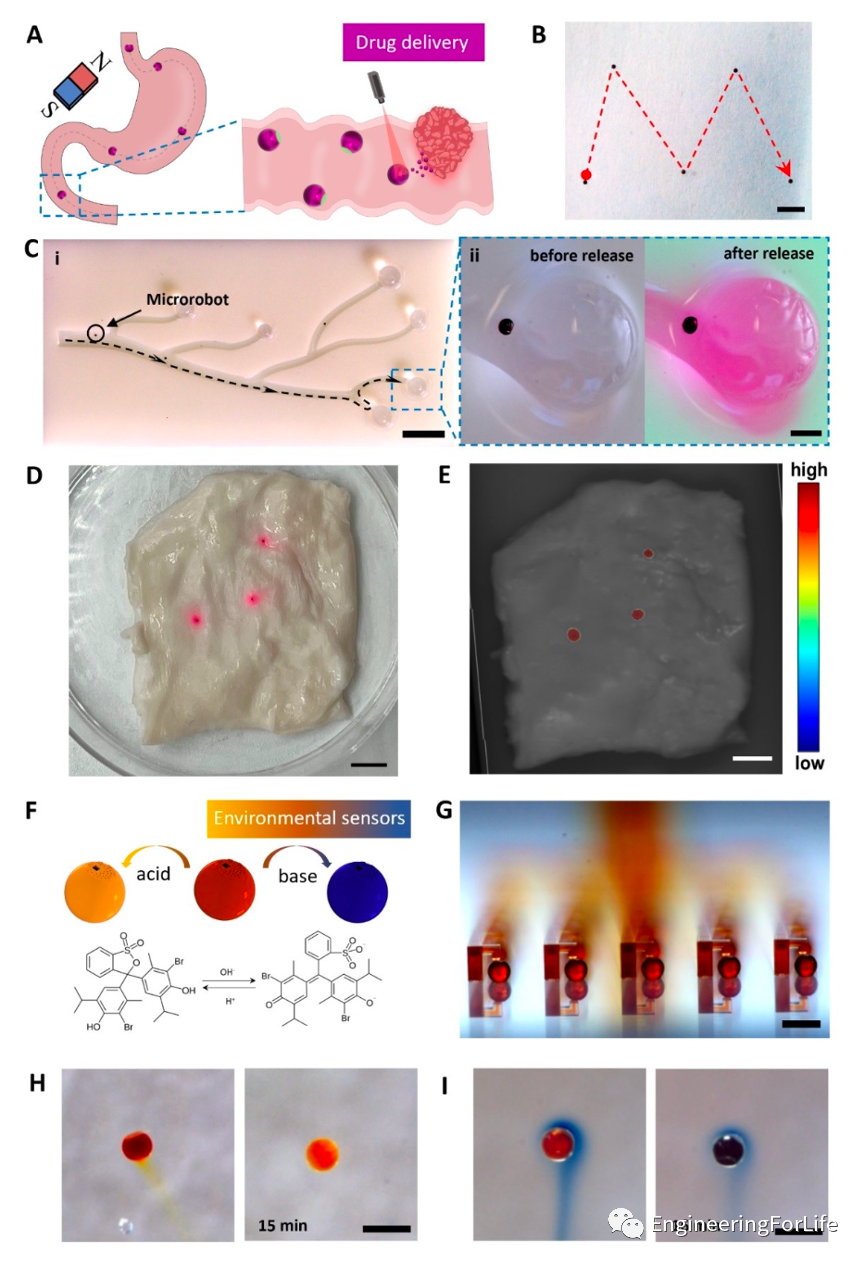
图3可填充微型机器人系统应用示例
总之,该研究利用MLDS技术,成功制造了可填充微型机器人系统,用于药物的可控递送。与现有的方法相比,该系统有四个关键的优势:1)物质装载量大,浪费少,非常装载适合昂贵的物质;2)其中空腔结构对物质可以提供充分的保护,防止外部环境因素的影响;3)避免装载过程中的化学耦合和加工条件,避免使敏感物质降解;4)通过在浸渍密封过程中加入智能材料层可以实现刺激反应功能。
论文链接: https://doi.org/10.1002/adma.202207791
审核编辑 :李倩
-
微型机器人
+关注
关注
0文章
111浏览量
19532 -
微流控
+关注
关注
16文章
509浏览量
18858
原文标题:基于微流控和浸渍密封技术的微型机器人,可用于药物时空可控递送
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型

【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
机器人技术的发展趋势
开源项目!用ESP32做一个可爱的无用机器人
微型导轨:手术机器人的高精度“骨骼”

北航成功研发微尺寸仿生机器人——昆虫机器人
捷克研发微型机器人,捕获水中塑料废物及细菌
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
机器人焊接技术的应用与发展前景
面向狭窄腔道医疗作业的微型机器人
LabVIEW的六轴工业机器人运动控制系统
微型5G智能网关助力打造智能清洁机器人






 工商网监
工商网监
评论