 一种具有机械门控电子通道的机器人皮肤(R-skin)
一种具有机械门控电子通道的机器人皮肤(R-skin)
类似人类的触觉对于提升机器人智能至关重要。然而,再现人类皮肤的切向“滑动”感知仍在研究中。
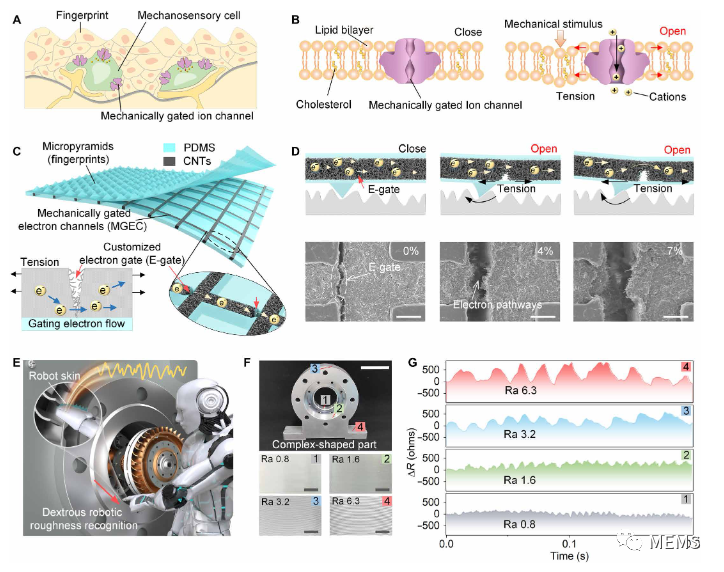
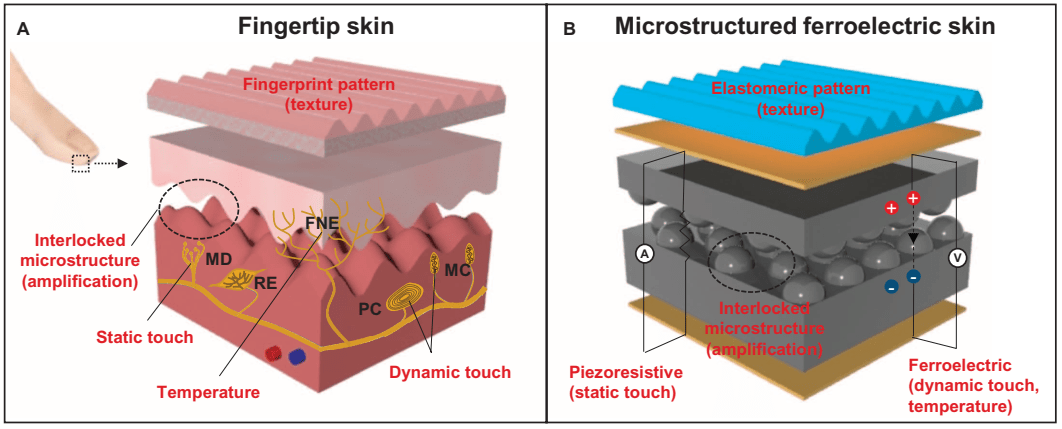
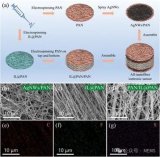
近日,西安交通大学邵金友教授、Xiaoliang Chen受机械感觉细胞的侧向门控机械感觉机制(通过侧向张力诱导离子通道的开闭来感知机械刺激)的启发,报道了一种具有机械门控电子通道的机器人皮肤(R-skin),通过金字塔人工指纹触发的电子门(E-gates,即嵌入网状电子通道内的定制V形裂缝)的开闭来实现超灵敏和快速响应的滑动触觉感知。
文章要点
1)通过模仿细胞膜来调节膜力学,局部应变在E-gate处被增强以有效地调节电子路径以获得高灵敏度,而在其他位置被削弱以抑制随机裂缝以获得鲁棒的稳定性。
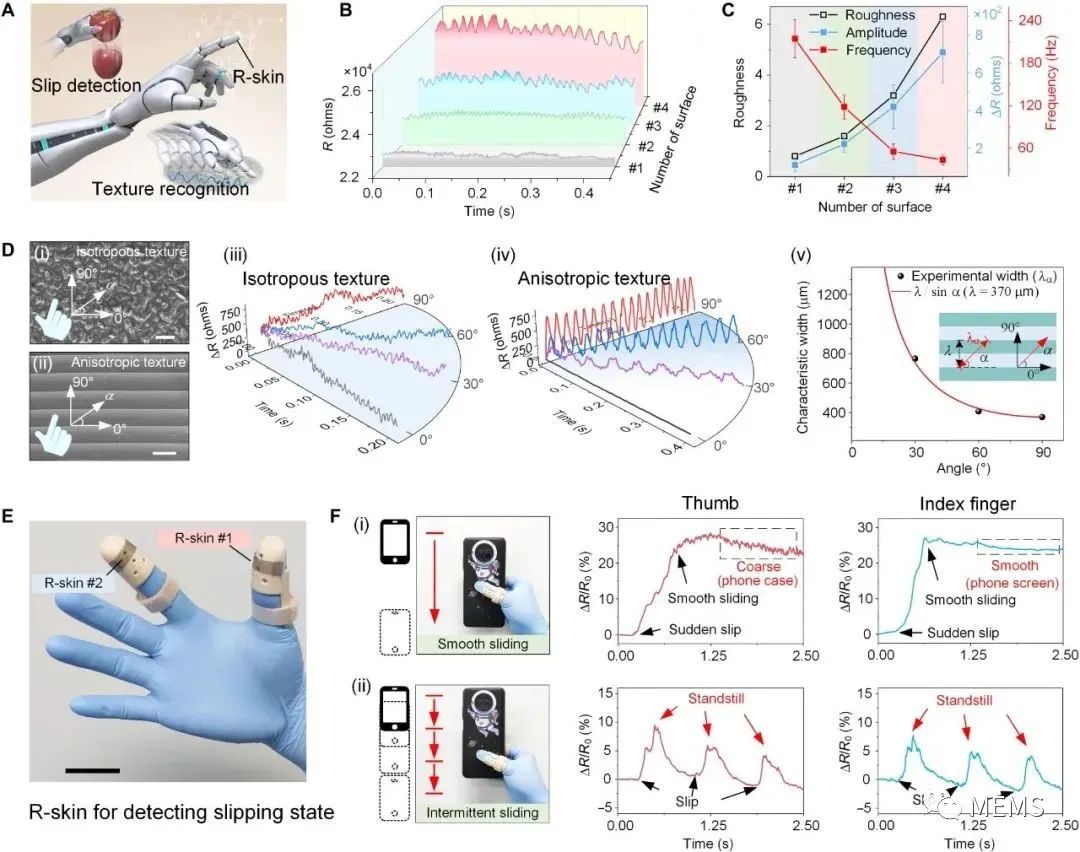
2)R-skin可以在超过人类的响应频率(485 Hz)下直接识别超细表面微结构(5 μm),并实现类似人类的滑动感知功能,包括灵巧地辨别复杂形状物体的纹理,并为抓握提供实时反馈。
论文信息:
DOI: 10.1126/sciadv.ade0720
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28468浏览量
207354 -
仿生机器人
+关注
关注
1文章
70浏览量
15257
原文标题:一种具有用于滑动触觉感知的机械门控电子通道的仿生机器人皮肤
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
的局限性以及衡量大模型的关键指标。阅读了该部分后,我感受到了一种前所未有的震撼,这种震撼不仅来源于技术本身的先进性,更来源于它对传统机器人控制方式的颠覆。
传统机器人的局限性与大模型的变革
传统的
发表于 12-29 23:04
吉林大学:研究具有3D力检测功能的自供电柔性电子皮肤触觉传感器
背景介绍 仿生功能电子技术是朝着开发与现实世界环境无缝集成的智能技术迈出的重要一步。受人类皮肤感官功能的启发,模仿人类皮肤特征的柔性传感器在商业开发和研究领域都引起了广泛关注,
安泰功率放大器在介电材料电子皮肤研究中的应用
介电材料电子皮肤作为一种新型智能材料,具有出色的传感性能和适应能力,在人机交互、仿生机器人和医疗等领域展示了广阔的应用前景。然而,其性能的进
工业机器人和机械臂的设计、功能和应用有哪些区别?
机械臂是一种由多个关节连接而成的机械结构,类似于人的胳膊。它通常具有可旋转或可伸缩的关节,使其能够在空间中执行精确的定位和操作。机械臂通常由


电子皮肤:引领服务机器人进入触觉新时代
随着技术的不断成熟和完善,我们有理由相信,电子皮肤将成为服务机器人领域的一项革命性技术,为人类社会带来更多的福祉和希望。

大象机器人开源协作机械臂机械臂接入GPT4o大模型!
和智能化的任务,提升了人机协作的效率和效果。我们个人平时接触不太到机械臂这类的机器人产品,但是有一种小型的机械臂我们人人都可以拥有它myCobot,价格低廉的

abb机器人的基本配置包括哪些
ABB机器人是一种广泛应用于工业自动化领域的智能设备。它具有高度的灵活性、可靠性和精确性,可以完成各种复杂的任务。为了实现这些功能,ABB机器人需要进行基本配置。以下是ABB
一种可实现稳定压力传感的新型可拉伸电子皮肤
现有的电子皮肤会随材料拉伸而降低传感精度。美国得克萨斯大学奥斯汀分校研究人员开发出一种新型可拉伸电子皮肤,解决了这项新兴技术的
实现电子皮肤温度预警的柔性可穿戴长波红外光热电探测器
电子皮肤具有无需身体接触即可感知热刺激的能力,将为智能机器人和增强现实等应用带来创新的互动体验。

一种具有压力和温度双重监测功能的全纳米纤维柔性离电传感器
具有实用功能的可穿戴多功能传感器对于电子皮肤(e-skin)、健康监测、人机交互等诸多领域的应用具有重要意义。





 工商网监
工商网监
评论