 一个实时单目追踪和稠密建图的算法框架TANDEM算法研究
一个实时单目追踪和稠密建图的算法框架TANDEM算法研究
01
概述
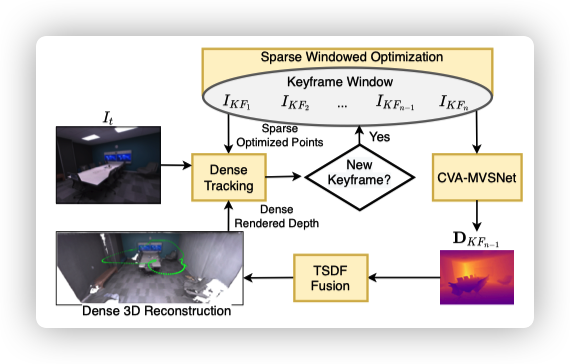
最近在研究TANDEM算法,是一个实时单目追踪和稠密建图的算法框架。TANDEM的算法框架可以概括为如下的几个部分:
1、位姿计算----在关键帧实施基于滑窗的像素级集束优化;
2、追踪前端----实施直接稠密图片配准,基于全局模型得到的深度图;
3、CVA-MVSNet----使用全部关键帧来预测稠密深度图;
4、全局地图----使用预测的深度图融合成全局地图,表示为TSDF体素表格。
TANDEM的整体架构图如下所示:
02 模块介绍
相关工作这里就不赘述了,主要涵盖了三维重建、RGB-D SLAM和单目SLAM三个方向的方法介绍和一般流程。这里,我们直接给出TANDEM算法框架中几个关键组件的介绍,也即是单目视觉里程计、使用CVA-MVSNet进行稠密深度估计和体素建图。
2.1单目视觉里程计
最近的一些方法,例如:DSO、ORB-SLAM,都是在多帧图像中使用一组稀疏点来追踪,最后计算出相机的位姿。虽然,使用更多的点来联合优化可以带来性能方面的优化,但是这回造成运行时间的显著提高。因此,在TANDEM中提出的视觉里程计,借鉴了DSO中所描述的----直接稀疏窗口优化后端。但是,TANDEM中还用了全局的TSDF模型来获取稠密深度图,这个深度图主要是用在前端的直接图像配准。
简单总结,TANDEM使用了稠密追踪前端和稀疏后端优化相结合的方式来提高追踪性能。
2.2稠密前端追踪
TANDEM前端的特点:
提供实时相机帧频的追踪
作为后端窗口优化的初始化输入
实现前端稠密点追踪(相较于DSO而言)
2.3CVA-MVSNet
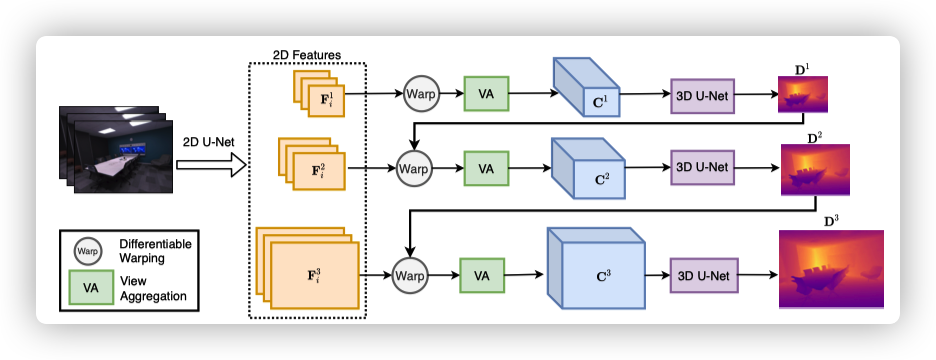
2.3.1单阶段深度计算
因为CVA-MVSNet使用了多阶段的方式来解决了内存损耗的问题,并且不同阶段之间大同小异,因此我们选取一个阶段进行详细分析,然后就可以熟知整个网络模型的作用和功能。
在分析之前,我们先给出模型输入和输出的一些变量的定义。
03 数据集和结果
1、训练集
本文训练了两个CVA-MVSNet的模型:一个使用实际的ScanNet数据集、另一个使用拟合数据集Replica数据集,一些结果如下图所示:
对于不可见的序列,本文的训练结果如下图所示:
2、测试集
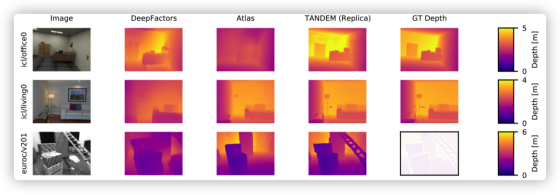
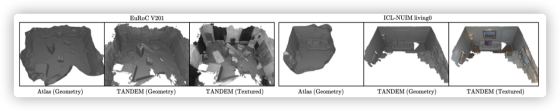
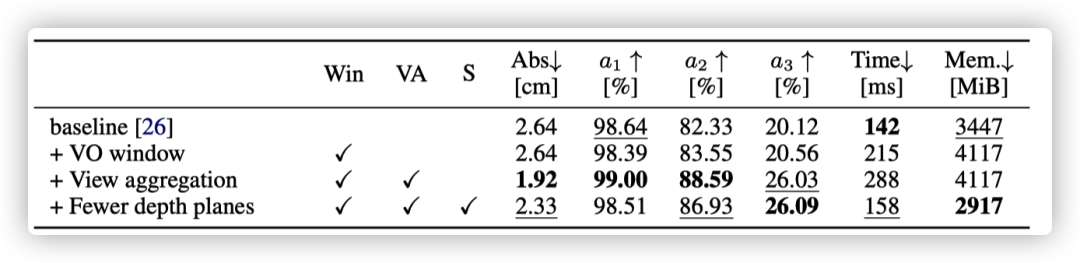
本文中使用了ICL-NUIM数据集和EuRoc数据集中的Vicon室内序列来评估稠密3D重建和追踪的结果。具体的一些结果如下:

04 结论
TANDEM是一个实时稠密单目SLAM系统,使用了直接像素里程计和多视图几何。尤其提出了CVA-MVSNet使用整个关键帧窗口,预测高质量的深度图;然后提出稠密追踪模式连接相机位姿估计和稠密3D重建,针对于TSDF融合创建的全局3D模型。结果表明,TANDEM获得更好的性能。 本文,我们对TANDEM论文进行了简单的讲解和分析,后续系列我们进一步深入分析论文的细节,以及后面的代码讲解分析。
审核编辑:刘清
-
SLAM
+关注
关注
23文章
427浏览量
31943 -
orb
+关注
关注
0文章
21浏览量
9922
原文标题:实时单目追踪和稠密建图的算法框架:TANDEM算法
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
雷达目标检测算法研究及优化
雷达目标检测算法研究及优化
数字PID调节器算法的研究
指纹脊线追踪算法研究
基于GSC框架降秩自适应滤波算法研究

一种加权稠密子图社区发现算法
遗传算法的单目相机标定
压缩感知的理论框架和应用的系统概述和信号重构算法研究
如何使用FPGA实现微型实时多目立体视觉机的设计
基于K-sup稠密子图的复杂网络概要算法
LINS算法的框架与代码分析
LSD中的激光点云/单目3D目标检测和多目标跟踪算法






 工商网监
工商网监
评论