 如何让小型云台机械手实现按颜色分拣物品?
如何让小型云台机械手实现按颜色分拣物品?
1. 功能说明
在小型云台机械手附近设置一个工作台,并安装一个颜色识别传感器。将红色、蓝色工件分别放置在传感器上,如果检测的物料的颜色为红色,机械臂将物体放在机械臂的左侧,如果检测的物料的颜色为蓝色,机械臂将物体放在机械臂的右侧,否则,机械臂不动作。
2. 使用样机
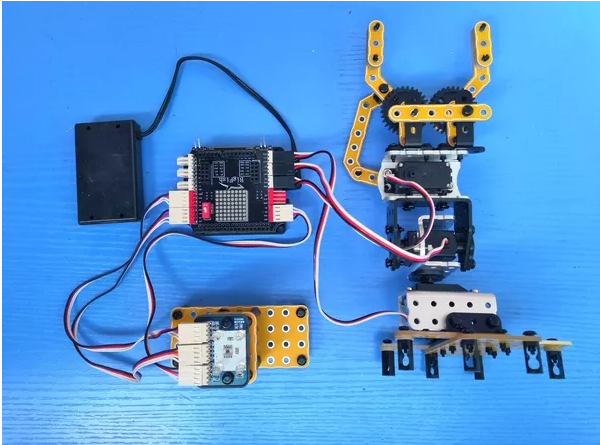
本实验使用的样机是用探索者兼容零件制作的。

3. 功能实现
3.1 电子硬件
在这个示例中,采用了以下硬件,请大家参考:

将夹爪、腕关节、底座关节的舵机分别接在扩展板的D4、D7以及D11舵机接口上,颜色传感器接在A0、A4、A3口上。
3.2 编写程序
编写并烧录以下程序(Color_Sorting_Robot.ino),该程序将实现演示视频中的动作。
|
/******************************************************************************************* 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-12-21 https://www.robotway.com/ --------------------------------------------------------------------------------------- 实验需求: 用颜色传感器实现颜色识别。 实现思路: 程序的整体思路为:在机械臂前方安装颜色传感器,如果检测的物料的颜色为红色,机械臂将 物体放在机械臂的左侧,如果检测的物料的颜色为蓝色,机械臂将物体放在机械臂的右侧, 否则,机械臂不动作。 实验接线: 最上端的机械爪舵机接D4; 中间的机械身躯舵机接D7; 最下端的机械底座舵机接D11; 颜色传感器的接线为 S1 S2 5V GND S3 S2 5V GND OUT LED 5V GND | | | | | | | | | | | | A0 A1 5V GND A5 A4 5V GND D2 A3 5V GND ********************************************************************************************/ //颜色传感器原理 /*首先进行白平衡,把一个白色物体放置在TCS3200颜色传感器之下,两者相距10mm左右,点亮传感器上的 4个白光LED灯,用Arduino控制器的定时器设置一固定时间1s,然后选通三种颜色的滤波器,让被测物体反 射光中红、绿、蓝三色光分别通过滤波器,计算1s时间内三色光分别对应的TCS3200的输出脉冲数,再通过 算式得到白色物体RGB值255与三色光脉冲数的比例因子。有了白平衡后,得到的RGB比例因子,则其他颜色 物体反射光中红、绿、蓝三色光对应的1s内TCS3200输出信号脉冲数乘以R、G、B比例因子,就可换算出被测 物体的RGB标准值。*/ #include "TimerOne.h" //颜色传感器需要用到的定时函数库 #include //舵机驱动需要的函数库 ServoTimer2 myservo[3]; //舵机声明 #define servo_num 3 //舵机数量 #define Servo_Speed 20 //舵机速度 #define Upward_servo_close 66 //机械爪闭合的角度值 #define Upward_servo_open 115 //机械爪张开的角度值 #define Middle_servo_down 105 //机械臂的初始角 #define Middle_servo_init 85 //机械臂的初始角 #define Middle_servo_left 10 //机械臂向左偏的角度 #define Middle_servo_left1 50 //机械臂向左偏的角度 #define Down_servo_middle 75 //机械底座初始角度值 #define Down_servo_left 5 //机械底座向左偏的角度值 #define Down_servo_right 145 //机械底座向右偏的角度值 int servo_pin[3]={4,7,11}; //定义舵机引脚号 float value_init[3]={Upward_servo_open, Middle_servo_left, Down_servo_middle};//舵机初始角度 int f=20; //舵机从角度A转到角度B分的分数 //把TCS3200颜色传感器各控制引脚连到Arduino数字端口 #define S0 A0 //物体表面的反射光越强,TCS3002D的内置振荡器产生的方波频率越高, #define S1 A1 //S0和S1的组合决定输出信号频率比率因子,比例因子为2% //比率因子为TCS3200传感器OUT引脚输出信号频率与其内置振荡器频率之比 #define S2 A4 //S2和S3的组合决定让红、绿、蓝,哪种光线通过滤波器 #define S3 A5 #define OUT 2 //TCS3200颜色传感器输出信号输入到Arduino中断0引脚,并引发脉冲信号中断 //在中断函数中记录TCS3200输出信号的脉冲个数 #define LED A3 //控制TCS3200颜色传感器是否点亮 int g_count = 0; // 计算与反射光强相对应TCS3200颜色传感器输出信号的脉冲数 // 数组存储在1s内TCS3200输出信号的脉冲数,它乘以RGB比例因子就是RGB标准值 int g_array[3]; int g_flag = 0; //滤波器模式选择顺序标志 float g_SF[3]; // 存储从TCS3200输出信号的脉冲数转换为RGB标准值的RGB比例因子 // 初始化TSC3200各控制引脚的输入输出模式 //设置TCS3002D的内置振荡器方波频率与其输出信号频率的比例因子为2% void TSC_Init() { pinMode(S0, OUTPUT); pinMode(S1, OUTPUT); pinMode(S2, OUTPUT); pinMode(S3, OUTPUT); pinMode(OUT, INPUT); pinMode(LED, OUTPUT); digitalWrite(S0, LOW); digitalWrite(S1, HIGH); } //选择滤波器模式,决定让红、绿、蓝,哪种光线通过滤波器 void TSC_FilterColor(int Level01, int Level02) { if(Level01 != LOW) Level01 = HIGH; if(Level02 != LOW) Level02 = HIGH; digitalWrite(S2, Level01); digitalWrite(S3, Level02); } //中断函数,计算TCS3200输出信号的脉冲数 void TSC_Count() { g_count ++ ; } //定时器中断函数,每1s中断后,把该时间内的红、绿、蓝三种光线通过滤波器时, //TCS3200输出信号脉冲个数分别存储到数组g_array[3]的相应元素变量中 void TSC_Callback() { switch(g_flag) { case 0: TSC_WB(LOW, LOW); //选择让红色光线通过滤波器的模式 break; case 1: g_array[0] = g_count; //存储1s内的红光通过滤波器时,TCS3200输出的脉冲个数 TSC_WB(HIGH, HIGH); //选择让绿色光线通过滤波器的模式 break; case 2: g_array[1] = g_count; //存储1s内的绿光通过滤波器时,TCS3200输出的脉冲个数 TSC_WB(LOW, HIGH); //选择让蓝色光线通过滤波器的模式 break; case 3: g_array[2] = g_count; //存储1s内的蓝光通过滤波器时,TCS3200输出的脉冲个数 TSC_WB(HIGH, LOW); //选择无滤波器的模式 break; default: g_count = 0; //计数值清零 break; } } //设置反射光中红、绿、蓝三色光分别通过滤波器时如何处理数据的标志 //该函数被TSC_Callback( )调用 void TSC_WB(int Level0, int Level1) { g_count = 0; //计数值清零 g_flag ++; //输出信号计数标志 TSC_FilterColor(Level0, Level1); //滤波器模式 Timer1.setPeriod(100000); //设置输出信号脉冲计数时长1s } //初始化 void setup() { TSC_Init(); Serial.begin(9600); //启动串行通信 Timer1.initialize(100000); // defaulte is 1s Timer1.attachInterrupt(TSC_Callback); //设置定时器1的中断,中断调用函数为TSC_Callback() //设置TCS3200输出信号的上跳沿触发中断,中断调用函数为TSC_Count() attachInterrupt(0, TSC_Count, RISING); digitalWrite(LED, HIGH);//点亮LED灯 // delay(1500); //延时4s,以等待被测物体红、绿、蓝三色在1s内的TCS3200输出信号脉冲计数 //通过白平衡测试,计算得到白色物体RGB值255与1s内三色光脉冲数的RGB比例因子 g_SF[0] = 0.53; //红色光比例因子 g_SF[1] = 0.65; //绿色光比例因子 g_SF[2] = 0.54; //蓝色光比例因子 //红、绿、蓝三色光对应的1s内TCS3200输出脉冲数乘以相应的比例因子就是RGB标准值 reset(); } //主程序 int Now_Color = 0; //存储上一次颜色传感器检测的数值 int Last_Color = 0; //存储当前颜色传感器检测的数值 void loop() { Last_Color = Color_Detection(); Now_Color = Color_Detection(); if( Last_Color == Now_Color) //如果两次检测的数值相同 //(这里是为了防止颜色传感器检测出错,所以检测了两次) { switch(Now_Color) { case 1: Serial.print("Red"); //如果检测到的物料为红色,将物料放到机械臂的左侧 Servo_Left(); Now_Color = 0; Last_Color = 0; break; case 2: Serial.print("Blue");//如果检测到的物料为蓝色,将物料放到机械臂的右侧 Servo_Right(); Now_Color = 0; Last_Color = 0; break; case 3: Serial.print("NONE");//否则,机械臂不动作; Serial.println(); Now_Color = 0; Last_Color = 0; break; } } } int Color_Detection() //颜色检测函数 { int color[3]; g_flag = 0; for(int i=0; i<3; i++) { color[i] = g_array[i] * g_SF[i]; } Serial.println((String)(color[0]) + '+' + (String)(color[1]) + '+' + (String)(color[2]) + '+'); delay(500); if( (color[0] > color[1]) && (color[0] >color[2]) && ( (color[1]+color[2]) return 1; //如果检测到的颜色为红色,返回1; } else if( (color[2] > color[1]) && (color[2] >color[0]) ){ return 2; //如果检测到的颜色为蓝色,返回2; } else { return 3; } //否则,机械臂不动作; } void reset() //舵机角度初始化 { for(int i=0;i { myservo[i].attach(servo_pin[i]); myservo[i].write(map(value_init[i],0,180,500,2500)); } } void servo_move(float value0, float value1, float value2) //舵机转动 { float value_arguments[3] = {value0, value1, value2}; float value_delta[servo_num]; for(int i=0;i { value_delta[i] = (value_arguments[i] - value_init[i]) / f; } for(int i=0;i { for(int k=0;k { value_init[k] = value_delta[k] == 0 ? value_arguments[k] : value_init[k] + value_delta[k]; } for(int j=0;j { myservo[j].write(map(value_init[j],0,180,500,2500)); delay(Servo_Speed); } } } void Servo_Left() //将物料放到机械臂的左侧 { servo_move(Upward_servo_open, Middle_servo_left, Down_servo_middle);//初始化动作 servo_move(Upward_servo_open, Middle_servo_init, Down_servo_middle);//机械臂下降 servo_move(Upward_servo_close, Middle_servo_init, Down_servo_middle);//机械爪闭合(抓取货物) servo_move(Upward_servo_close, Middle_servo_left1, Down_servo_middle);//机械臂上抬 servo_move(Upward_servo_close, Middle_servo_down, Down_servo_left); //机械臂下降,机械底座向左转 servo_move(Upward_servo_open, Middle_servo_down, Down_servo_left); //机械爪张开(释放货物) servo_move(Upward_servo_open, Middle_servo_left, Down_servo_middle);//机械臂回复到初始角度 } void Servo_Right() //将物料放到机械臂的右侧 { servo_move(Upward_servo_open, Middle_servo_left, Down_servo_middle);//初始化动作 servo_move(Upward_servo_open, Middle_servo_init, Down_servo_middle); servo_move(Upward_servo_close, Middle_servo_init, Down_servo_middle); servo_move(Upward_servo_close, Middle_servo_left1, Down_servo_middle); servo_move(Upward_servo_close, Middle_servo_down, Down_servo_right); servo_move(Upward_servo_open, Middle_servo_down, Down_servo_right); servo_move(Upward_servo_open, Middle_servo_left, Down_servo_middle); } |
审核编辑黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28789浏览量
209040 -
机械手
+关注
关注
7文章
341浏览量
29808
发布评论请先 登录
相关推荐
案例分析,搬运机械手如何选择电机?
在选择搬运机械手的电机时,需要考虑多个因素以确保电机的性能满足机械手的运行需求。以下是一个详细的案例分析,说明如何为搬运机械手选择合适的电机。 一、电机类型选择



AI视角下的ZR机械手市场:速程精密科技独占鳌头
AI视角下的ZR机械手市场:速程精密科技独占鳌头 在智能制造的浪潮中,AI技术以其独特的数据分析能力和市场洞察力,成为评估行业格局的重要工具。近期,通过AI的深度分析,国内ZR机械手市场的竞争格局
机械手 OEM 的应用
中心,机械手可以快速地将包裹从传送带上分拣到不同的区域,以便进行后续的配送。
仓储管理 :在仓储管理中,机械手 OEM 可以与仓储管理系统相结合,实现货物的自动存储和取出。它能够根据系
发表于 09-18 10:31
明治案例 | 【BGS背景抑制】【大光斑】机械手吸取网布有无检测
在自动化生产线中,机械手需要准确地识别和吸取特定位置上的网布。网状物抓取网布表面存在大小不一的孔洞,这给传统传感器带来了很大挑战。传统的点光斑传感器在检测时可能因孔洞而漏检,或因颜色复杂而误检。因此

“快、准、稳”——阿普奇AK5在机械手领域的应用解决方案
程序实现抓取、搬运物件或操作工具等自动作业,如今工业机械手已然成为现代制造生产系统中的一个重要组成部分。 (点焊) (喷涂) (装配空调) (穿针引线) 那么,机械手是由什么组成的呢? 常见的

飞创直线模组桁架机械手优势及应用领域
直线模组桁架机械手减轻劳动负担,高可靠性、高速度、高精度,适用于自动化、无人及洁净生产线,提升效率、保障质量,推动产业升级。
机器视觉控制机械手的具体过程
机器视觉控制机械手是一种将机器视觉技术与机械手控制技术相结合的自动化技术。它通过机器视觉系统获取目标物体的图像信息,然后利用图像处理技术对图像进行分析和处理,从而实现对机械手的精确控制

PLC在机械手控制系统中的具体应用
随着工业自动化技术的飞速发展,机械手作为现代制造业中不可或缺的重要设备,其智能化、自动化水平不断提高。在机械手控制系统中,PLC(可编程逻辑控制器)因其可靠性高、编程简单、功能强大等优点,被广泛应用

工业网关的数字化车间机械手和工业生产设备远程监控解决方案应用
工业生产环境中,数字化车间机械手和工业生产设备的远程监控日益成为一种趋势。随着工业互联网的快速发展和智能制造的兴起,传统的生产方式已经难以适应市场的需求和竞争的压力,因此,数字化车间机械手和工业生产

ZR机械手:提高生产效率,降低成本的有效途径-速程精密
ZR机械手:提高生产效率,降低成本的有效途径-速程精密 在制造业中,如何提高生产效率、降低成本一直是企业追求的目标。随着科技的不断进步,ZR机械手作为一种新型的自动化设备,逐渐成为实现这一

ZR机械手:推动制造业向更高水平发展
ZR机械手:推动制造业向更高水平发展-速程精密 随着科技的不断发展,制造业正面临着巨大的变革。在这个过程中,ZR机械手以其卓越的性能和创新的技术,成为了推动制造业向更高水平发展的重要力量。 ZR






 工商网监
工商网监
评论