 一个关于三相Vienna拓扑技术知识(下)
一个关于三相Vienna拓扑技术知识(下)
七.母线均压原理的分析
我们知道,三相Vienna PFC拓扑的母线电压800V是由两个电容C1和C2串联进行分压,电容中点的电位O由电容的充放电决定,两个电容的电压应该保持均衡以保持真实的三电平运行条件。否则输出电压可能包含不期望的谐波,甚至会影响到电路的完全性。
三相三电平PFC正负母线的均衡度会影响PFC的性能:
1、输入电流THD;
2、功率开关管和二极管的应力(本身以及后级功率电路);
3、动态时母线电容容易过压;
电容中点的电位偏差与PFC正负母线电容的充放电过程相关,通过附件开关状态可以看出,a组和z组工作状态没有电流流入或流出电容中点,因此两个电容的充放电是一样的,不会产生偏压。只有b、c、d组的开关状态才会影响到PFC母线电容充放电的差异,产生偏压。
根据前面的工作原理分析,POP工作状态只给电容C1进行充电,ONO工作状态只给电容C2进行充电,故可以根据这两个工作状态来控制中点电位,在控制中可以调节ONO和POP两个工作状态的作用时间来进行均压。
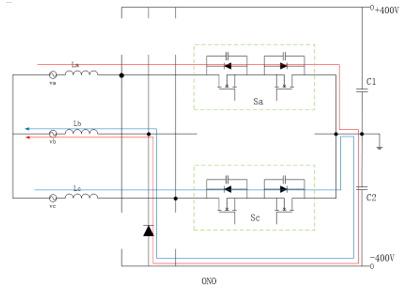
图19 C2充电
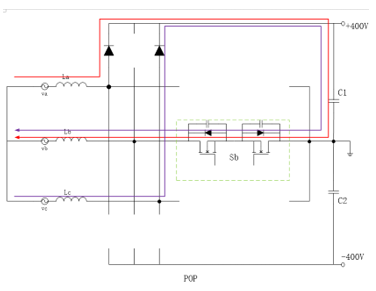
图20 C1充电
这个时候可以在整个控制环路中添加一个偏压环,用于调节ONO和POP的作用时间,来进行母线电压的均压作用。
具体实施方:是分别对正母线和负母线进行采样,然后得出差值(直流分量),该差值经过偏压环的补偿器调节之后叠加到输入电流参考正弦波,经过精密整流后变换为幅值有差异的双半波作为电流环的给定,以此来改变ONO和POP的作用时间,改善PFC母线均压。
如图22所示,compa、compb和compc分别是每相的电流环计算出来的结果,以0~30度扇区为例,当正母线相对于中点的电压低于负母线时,正半波的给定变小,负半波的给定变大,POP工作状态的时间变长,给正母线电容的充电时间变长;ONO工作状态的时间变短, 给负母线电容的充电时间变短。当正母线相对于中点的电压高于负母线时,正半波的给定变大,负半波的给定变小,POP的作用时间变长,给正母线电容充电的时间变短,ONO的作用时间变长,给负母线的充电时间变长。图中comp值实线代表上个周期的值,虚线代表当周期的值;阴影部分代表变化的时间;
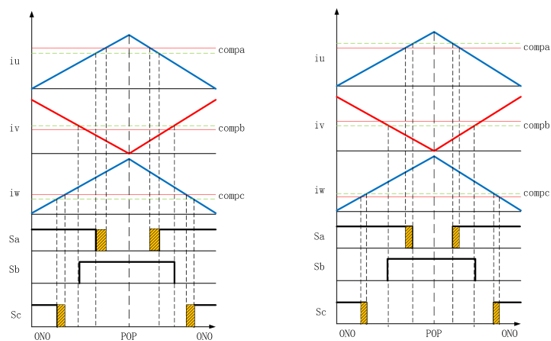
图22 均压控制示意图
以上说明的是主功率回路正常工作时候可以通过调节来控制PFC母线电容的均压,但是当模块起机的时候呢?可以采用辅助电源直接从+400V~-400V之间进行取电,由于电容有差异性,内阻不可能完全相等,也会差生偏压。还有一个是要采用更高等级的MOSFET,成本高,而且现在充电模块的待机损耗也是一个问题,很多客户要求模块的待机损耗不能超过多少。
当然还有另一种辅助电源取电方式,也是现在厂家主流的方式。就是正负母线均挂一个辅助电源,在起机的时候通过充电电阻给母线电容充电,变压器采用绕组竞争的方式,谁的母线电压高,就采用谁供电,这样可以很好的保证模块在起机过程中的均压效果;在模块正常工作起来以后,也是同样的道理。而直接从+800V取电没有这种效果。
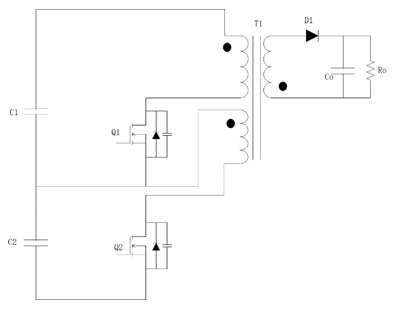
图23 辅助电源示意图
八.原理仿真
输入电流
输入电流波形,参数没有调好,将就着看吧。
各点电压波形
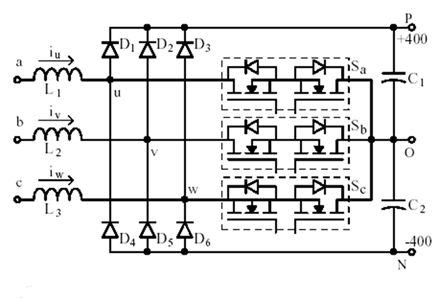
输入线电压峰值与PFC总母线电压的比值定义为调制系数m,m=Vlp/2Ed;其中Vlp是线电压的峰值;整流器可以被认为是与市电通过PFC电感连接的电压源,为了使输入电流正弦,桥臂中点线电压也应该为正弦波形。而实际情况下桥臂中点线电压是正弦 PWM波形,谐波分量和最大步进是两个主要考虑的因素。
(1)当输入线电压峰值值大于Ed时,桥臂中点线电压电压波形euv,是一个5阶梯的电压波形,幅值为0,±400V,±800V,步进是400V;
(2)当输入线电压峰值值小于Ed时,桥臂中线线电压波形是一个3阶梯的电压波形,幅值为0,±400V,步进为400V;
桥臂中点相对与市电中点的电压波形eun,是一个9阶梯的电压波形;幅值为0,±133V,±266V,±400V,最小步进是133V,最大步进是266V;由于功率开关管和散热器之间有寄生电容,这个阶梯信号会产生共模噪声;
电容中点O相对于市电中点的电压波形eon,是一个5阶梯波形,幅值为0,±133V,±266V,步进为133V;
九.环路分析及数字化
工作原理
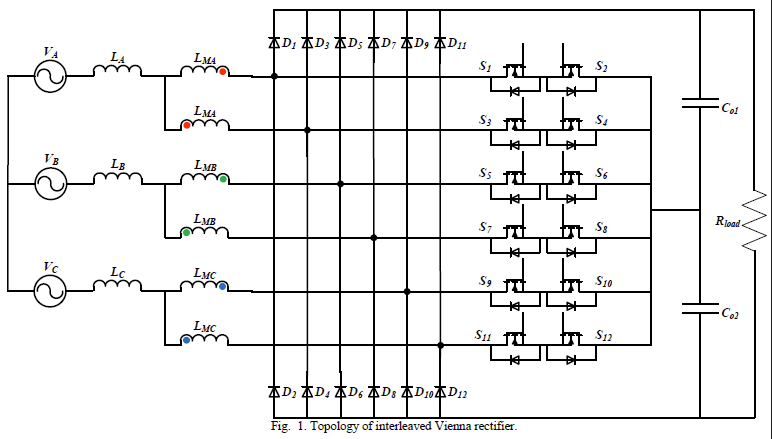
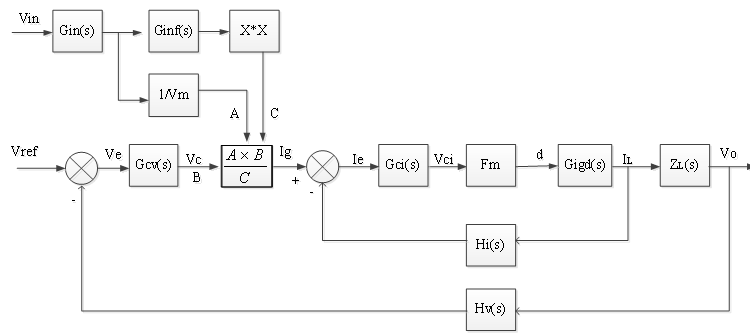
输入交流电压和电感电流,以及PFC母线电压经过采样和滤波由DSP的ADC口采样到DSP内,然后通过一个电压反馈补偿器Gcv(S),输出电压环的反馈信号Vc,然后通过一个乘法器单元将电压调节器的输出Vc与输入电压的全波整流波形相乘,得到整流桥后电流的指令值Iref。正是该乘法器保证了输入电流与输入电压同相且波形相同,使电源输入端的功率功率因数为1,它是实现功率因数校正功能的关键。在图1所示的电路中,PFC参考电流合成器还包含了一个输入电压全波整流值的平方电路和除法器,主要是为了提高控制系统对输入电压变化的动态响应速度,它对于宽输入电压范围和输入电压波动较大的应用场合更为必要,我们将上面的电路框图用传递函数框图表示:
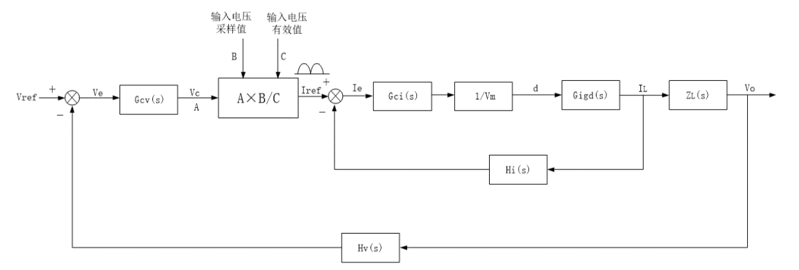
图32 PFC传递函数框图
其中:Gcv(s)为电压环的补偿函数,Gci(s)为电流环补偿函数,Vm为载波幅值,Gigd(s)为电感电流对占空比D的函数,ZL(s)为电感电流到输出电压的阻抗,Hi(s)为电流环采样函数,Hv(s)为电压环采样函数。
在三相PFC的数字控制当中,可以采用Microchip双核dsPIC33CH系列,由于其内部具备双核CPU,所以整个控制我们分配在两个内核中,主核Master完成电压环以及保护和快速采样滤波计算等环节,从核Slave完成电流环和发波的功能。
双核示意图如下:
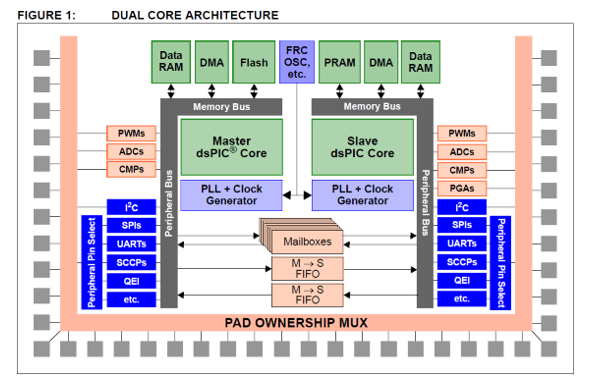
图33 dsPIC双核框图
双核系列的dsPIC具有如下特点:
主核和从核分别独立工作;在应用开发阶段可以分别编程和调试;主核和从核都有它们自己的中断控制、时钟发生器、端口逻辑和外设资源;主核最大工作90MIPS,从核最大工作100MIPS;PFC电流环
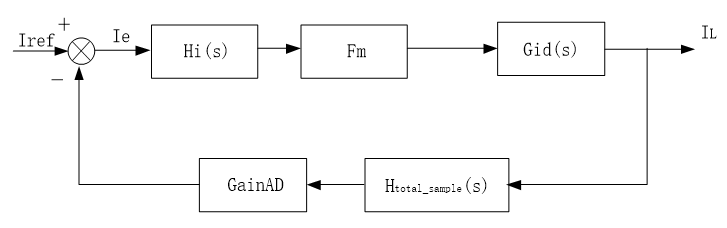
图34 PFC电流环框图
在Vienna电路中,两组PFC母线电容对输入等效为以中点为基准的两个并联电容组,三相二极管电流对其充电,对输出而言其又等效为两个串连的电容,对负载供电,所以每相流入PFC电容电流和流出PFC电容电流的关系为2/3。
故三相Vienna拓扑的主电路传递函数为:
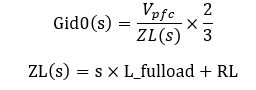
L_fulload为满载情况下PFC电感值,RL为电感串联电阻。
我们知道了主电路的传递函数后,其他比如AD增益(包括采样、保持、转换)、硬件采样电路、Fm等传递函数都可以表达出来了。这样除了补偿器之外的开环传递函数都清楚了,计算或者仿真出除补偿器的Bode图,根据开环传递函数的Bode图,设计出合理的补偿器。
在数字电源控制中,一般采用的补偿器有PI控制器、SZSP控制器、2P2Z控制器、3P3Z控制等。在开关频率以下,电流环开环传递函数为一个单极点系统,可以将补偿函数设计为一个PI控制系统。
由于PFC电感在不同的直流偏置下感量变化非常明显,nFeSi材质在正弦电流过零点和峰值附近相差近3倍,为了能提高过零点的低频增益和带宽,同时保证峰值附近的稳定,我们需要实时的调节电流环的相关参数,这样能时时的改善带宽和增益。
电压环
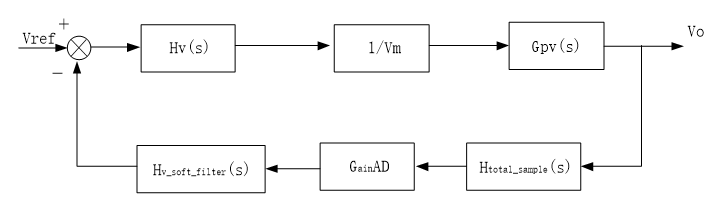
图35 PFC电压环
PFC电流内环和功率级形成一个电流源,因此PFC电压环的被控对象在低频可以等效为驱动电容的电流源,在100Hz频率附近,电压环开环传递函数为一个单积点系统。PFC电压环在确保当负载变化时输出电压稳定的同时,带宽应该足够低,从而使频率大于100Hz时的环路增益足够低,以减小PFC输出电容上的100Hz电压纹波对PFC输入电流的调制作用,否则该调制作用会引起输入电流的严重畸变,当然过低的电压环带宽回导致电压动态速度过慢,在THD设计满足要求的情况下,可以再调节带宽。
以上是针对稳态的电压环设计,如果输入或者输出在进行动态跳变,为了保证电路的可靠性,可以加入快环。也即在动态时,为了加快环路响应,满足动态的要求,采用另外一组环路参数,同时去除软件滤波。当总母线电压采样大于或者小于当前总母线电压给定的一定值时,进入快环;当总母线电压采样不再大于或者小于当前总母线电压给定另一值时,退出快环。当然,由于母线电容的ESR容易受环境温度的影响,所以当环境温度过低时,母线电容的ESR增大,电压环调节过快,会导致母线电压过压。
所以电压环的设计不仅要考虑到稳态的低带宽,还要考虑动态响应以及受环境温度的影响。
母线电压偏压环
PFC电路有正负母线输出,所以要控制正负输出平衡:

。把叠加到电压波形给定中去,这样可以调节母线平衡(见均压原理分析)。
母线电压偏压环是纯比例环节,即有静差调节,所以即使最终调节稳定的情况下,母线还是会存在一定的差异,如果K越大,δ 输出就越大,调节能力就越强,平衡度就越好,但是注入到输入电流的谐波也就越大,影响THD指标。所以需要在THD和母线平衡之间做出平衡。
为了消除正、负母线之间的静差,可以采用PI环节来代替纯比例环节,但是积分环节本身存在退饱和的问题,对于Vp, Vn 不停变化的系统,调压是通过改变小矢量的持续时间,积分的响应速度慢,可能反而对小矢量超调或欠调,导致正、负母线电压一直处于偏压的状态。所以采用纯比例环节进行正、负母线电压的调节可以保证时时性。
由于母线偏压环的调节,会对THD造成影响,所以要根据母线偏压的程序选择比例系数和输出δ的最大范围,避免过分调节。
补偿器的数字化
数字补偿器设计流程如下:
首先选择一个合适的已知原型滤波器传递函数(要选择合适的零极点);将该原型滤波器的s域传递函数映射到z域中;将z域转换为时域内的线性差分方程;
从s域到z域的变换,我们一般采用双线性变换,又称Tustin变换和梯形变换。它将s域中的模拟传递函数转换为z域中的等效数字传递函数,它只是表示的一个近似值,相对于采样频率的交叉频率越低,近似值就越可靠。
以3P3Z控制器设计为例,在s域的表达式为:
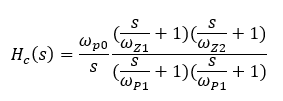
进行双线性变换,将
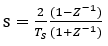
带入Hc(s)中,经过化简可以得出z域表达式:

将z域转换为线性差分方程:

在MCU里面执行的大致过程如图36所示:
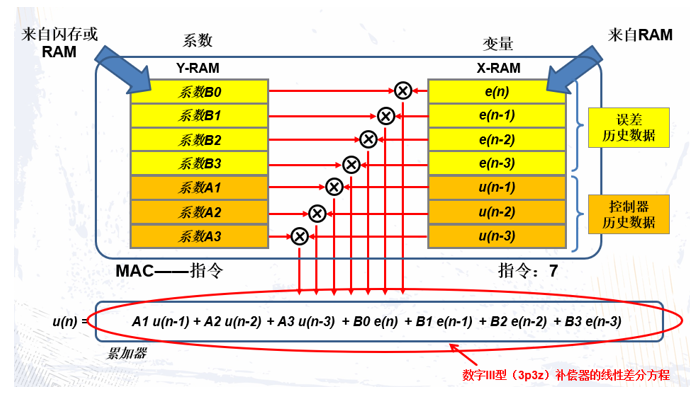
图36 数字Ⅲ型控制器实现方式
-
拓扑
+关注
关注
4文章
341浏览量
29588 -
VIENNA
+关注
关注
2文章
12浏览量
8237
发布评论请先 登录
相关推荐
美高森美展出新型30 kW三相Vienna PFC参考设计和SiC解决方案
基于powerSUITE的TIDM-1000三相VIENNA PFC方案的软件实施过程是怎么样的?
C2000 MCU三相功率因数校正参考设计包括BOM及层图
探讨交流个人对「三相 VIENNA 拓扑」的理解
T型三电平双向整流和逆变的功能
三相三电平VIENNA整流器的仿真分析
三相电源测量基础知识

大厂48V100A 电源,三相输入,Vienna+三电平半桥 拓扑,内容包含原理图 源代码 附赠大功率电源开发资料
一个关于三相Vienna拓扑技术知识(上)





 工商网监
工商网监
评论