 基于RoboMasterC型开发板的RT-Thread使用分享(二)
基于RoboMasterC型开发板的RT-Thread使用分享(二)
这次继续填坑,本次我们将介绍PWM功能的使用,实现呼吸灯的功能。那么接下来就直接开始我们的实践部分。
创建工程
在上篇文章中我是使用基于芯片创建的,我原本想着不通过BSP文件在教程中教大家一步一步的通过Kconfig+CubeMX配置出可以驱动整个开发板所有外设的工程的。在社区前辈的提醒后才知道通过基于芯片创建工程是没有办法Kconfig配置的。因此我在之后的教程中我会基于RT-Thread提供的BSP文件stm32f407_robomaster_c来创建工程链接如下
rt-thread/bsp/stm32/stm32f407-robomaster-c at master · RT-Thread/rt-thread (github.com)
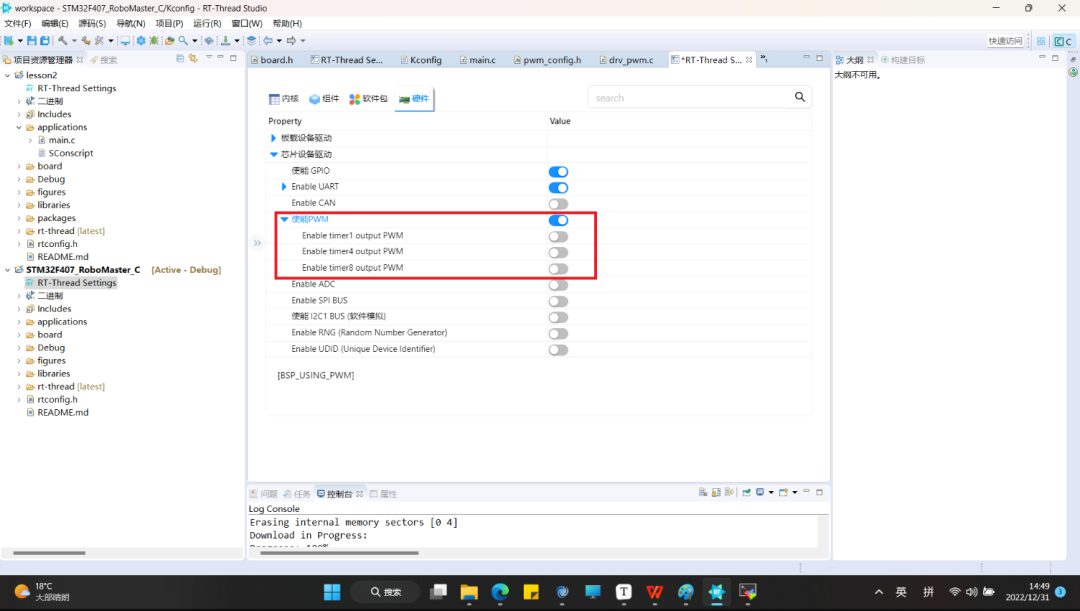
但是这个bsp文件暂时还没有支持板上的所有外设,因此我计划随着教程的编写,我也会帮忙维护这个bsp文件,将我们使用到的外设增加支持。便于大家后续使用,也满足我希望告诉大家Kconfig配置的计划。下图是目前bsp文件的外设支持情况。

下面就正式开始创建工程。
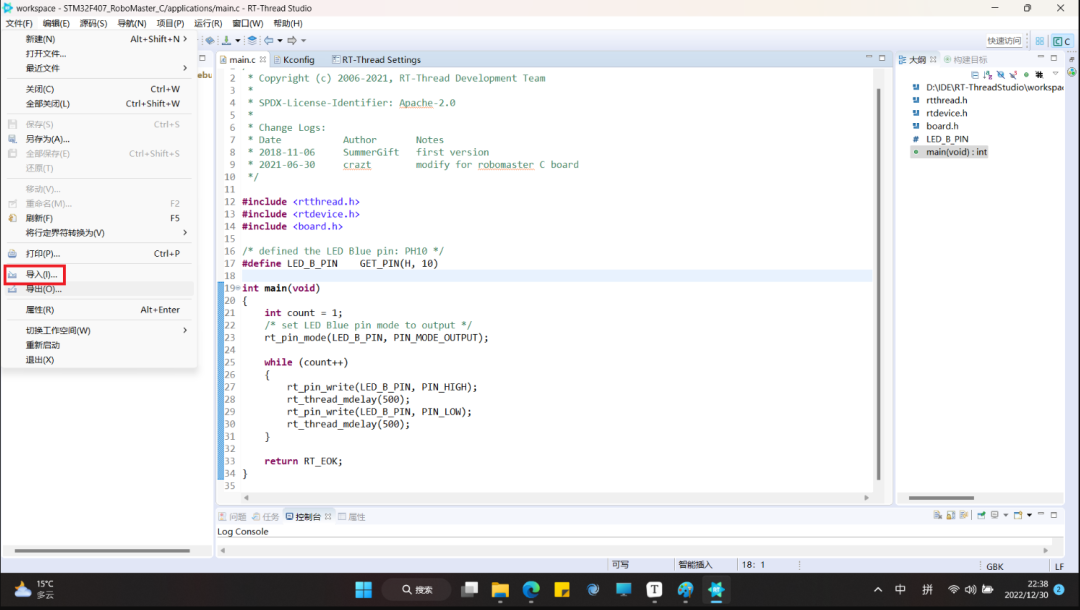
我们这里点击导入
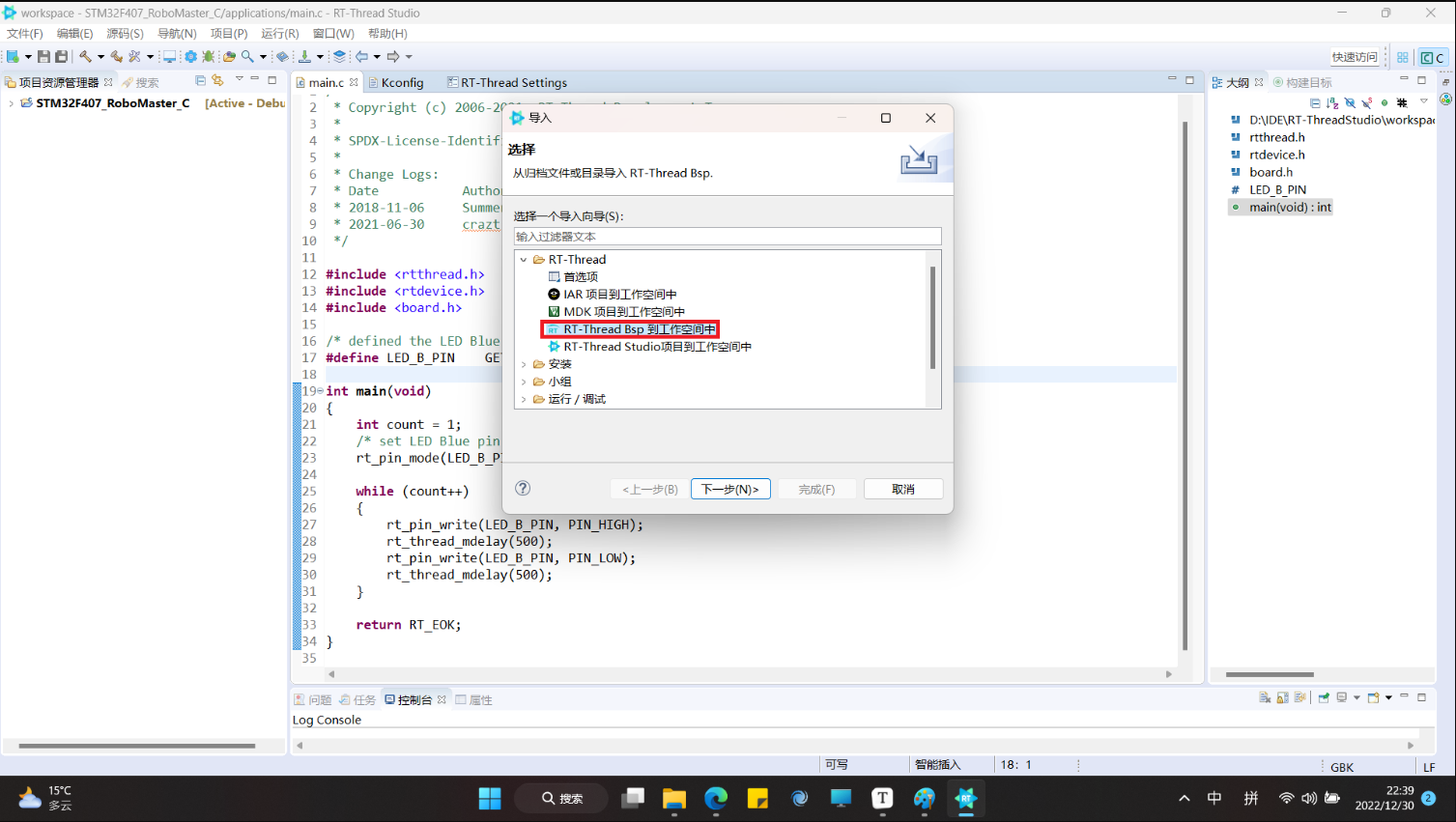
之后选择RT-Thread BSP到工作空间中
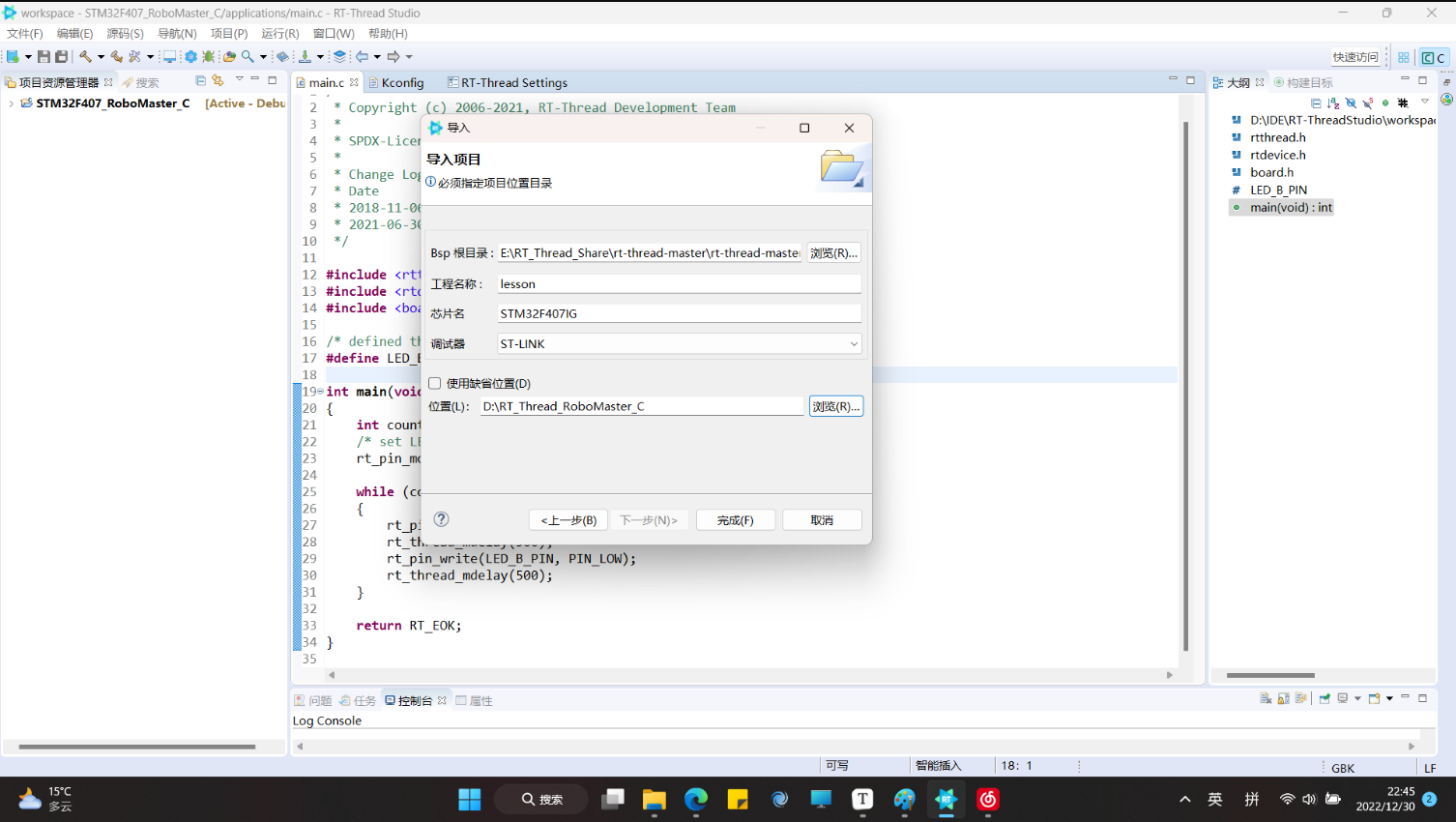
BSP根目录选择从Github下载下来的bsp文件路径,点击完成,即可创建工程。
点击编译,下载后根据BSP文件提供规范,下载后将实现LED灯闪烁的功能。如下图LED_B闪烁说明工程创建成功。

PWM教程之呼吸灯
CubeMX配置
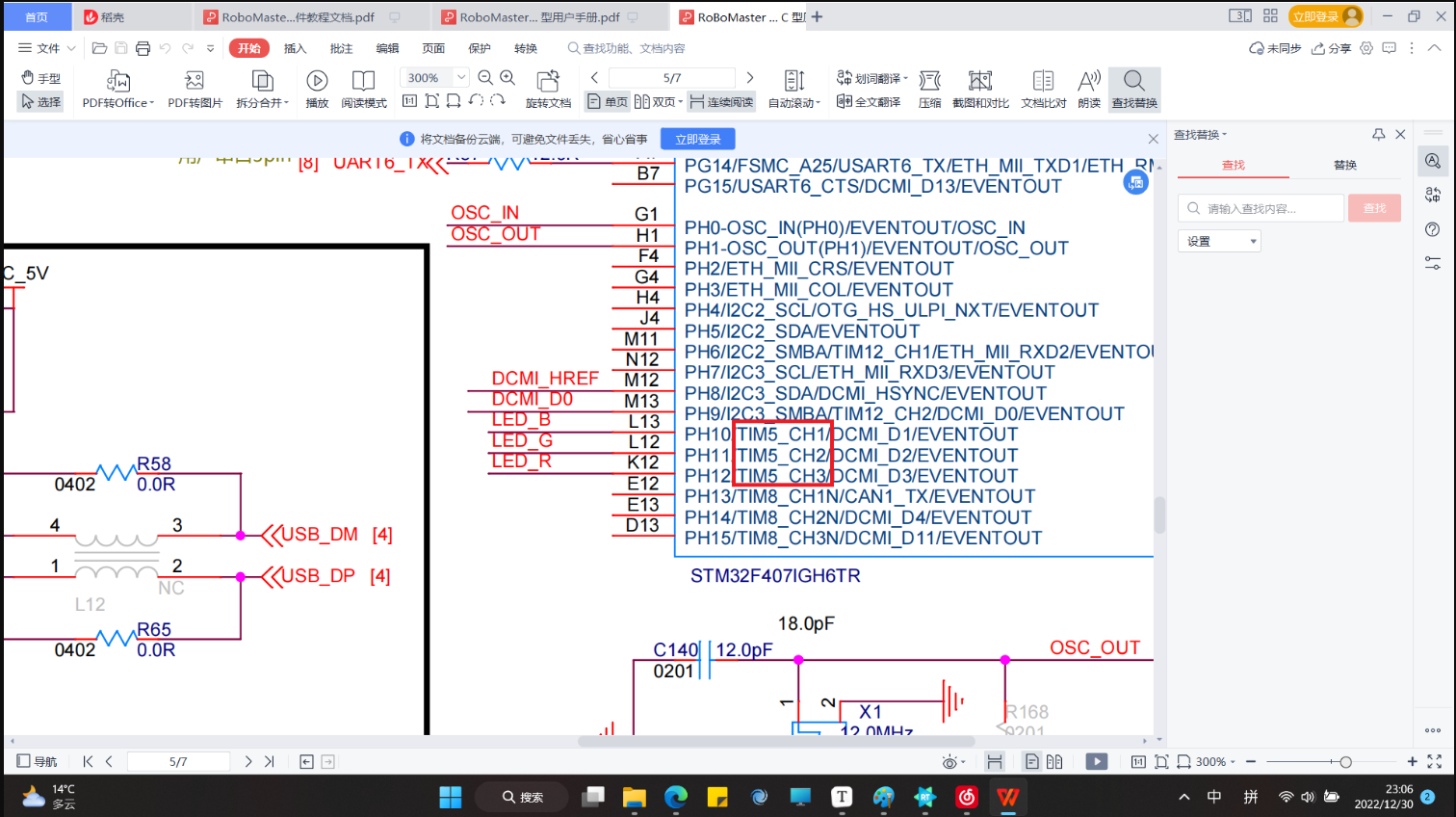
首先我们来看一下开发板原理图,来看看LED引脚连接着哪一个定时器输出引脚。
通过原理图我们可以看到是TIM5的1、2、3通道。
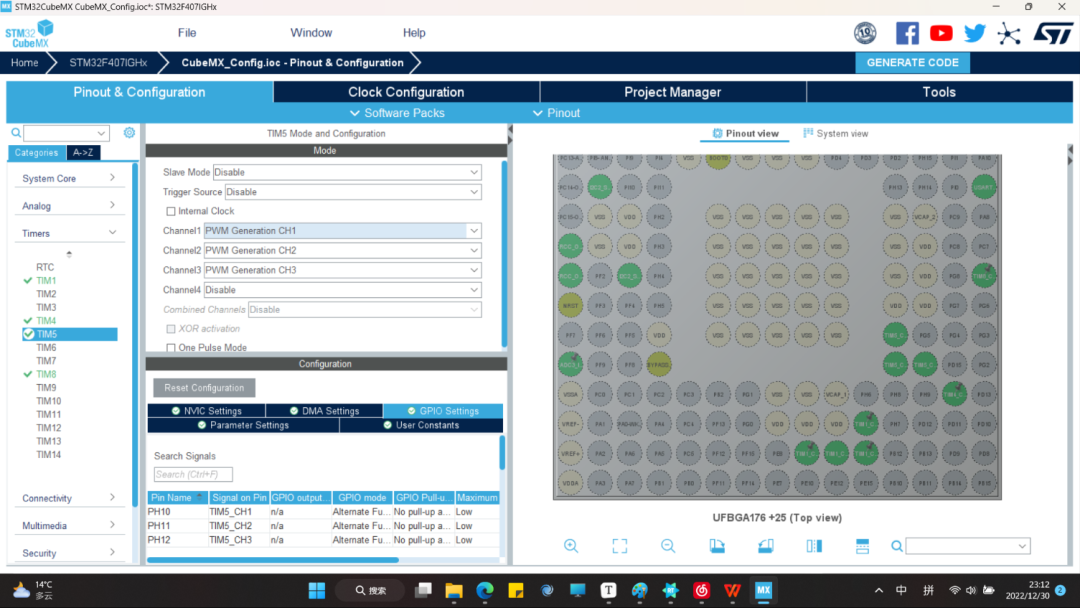
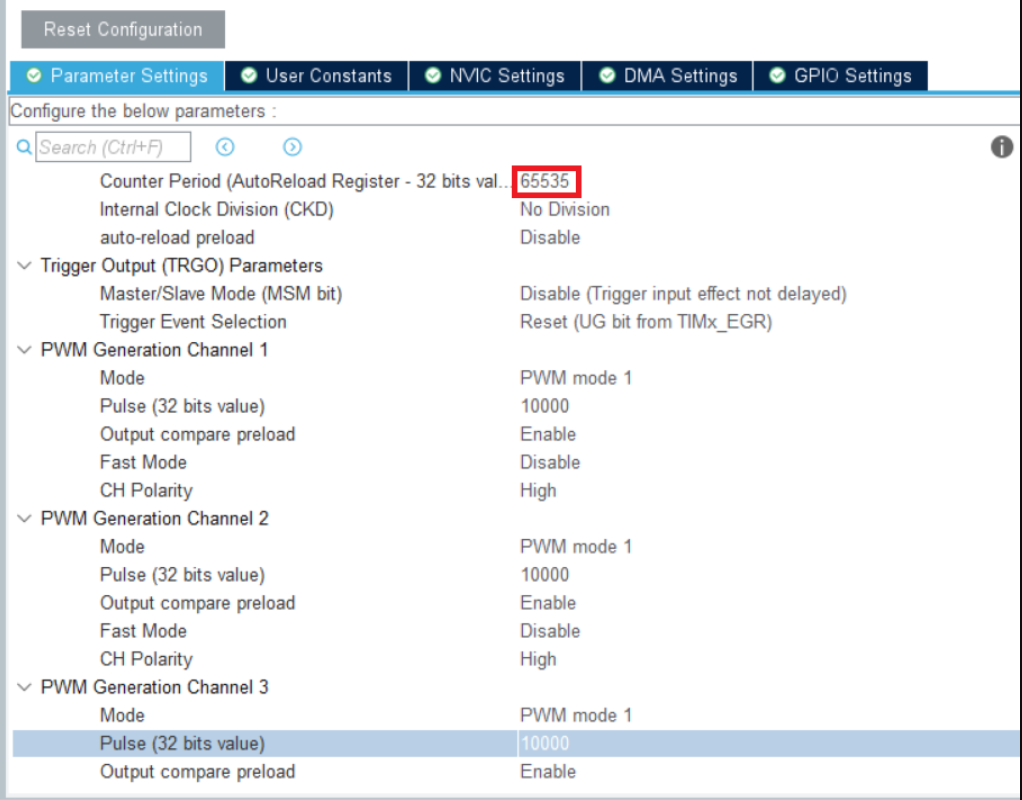
设置重载值为65535。这里设置的原因我会在后面进行频率计算的时候再说明。
原理讲解(计算部分新手可视情况略过)
PWM简介
PWM即脉冲宽度调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
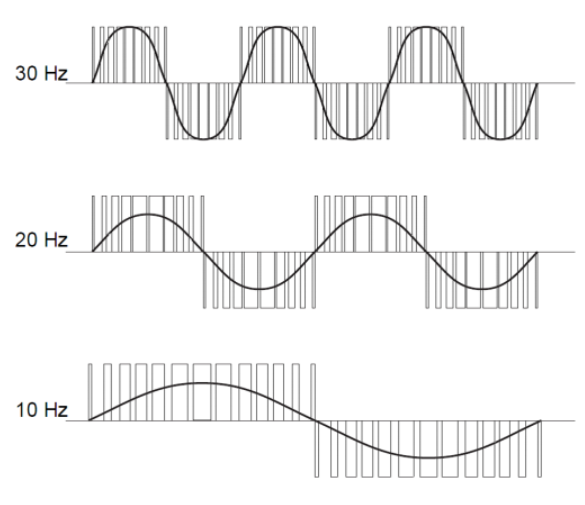
例如上图中,矩形脉冲是 stm32 输出的数字信号,当这个信号接到外设上时,效果可以等效为这个正弦波。
一个周期内高电平的持续时间占总周期的比例成为占空比,通过修改占空比,可以改变输出的等效模拟电压。例如输出占空比为 50%,频率为 10Hz 的脉冲,高电平为 3.3V.则其输出的模拟效果相当于输出一个 1.65V 的高电平。此外 PWM 输出的频率也会影响最终的 PWM输出效果,PWM 输出的频率越高,最终输出的“连续性”越好,越接近模拟信号的效果,频率低则会增强离散性,最终的输出效果会有比较强的“突变”感。
脉冲调制有两个重要的参数,第一个就是输出频率,频率越高,则模拟的效果越好。第二个就是占空比。占空比就是改变输出模拟效果的电压大小。占空比越大则模拟出的电压越大。
定时器触发频率计算
接下来给大家简单的讲解一下定时器触发频率,以及PWM信号的周期和占空比的计算。
首先是定时器的触发频率,这里我们首先需要查看datasheet,看我们的TIM5是挂载在哪一条总线的。这里我们可以看到他是在APB1上的。
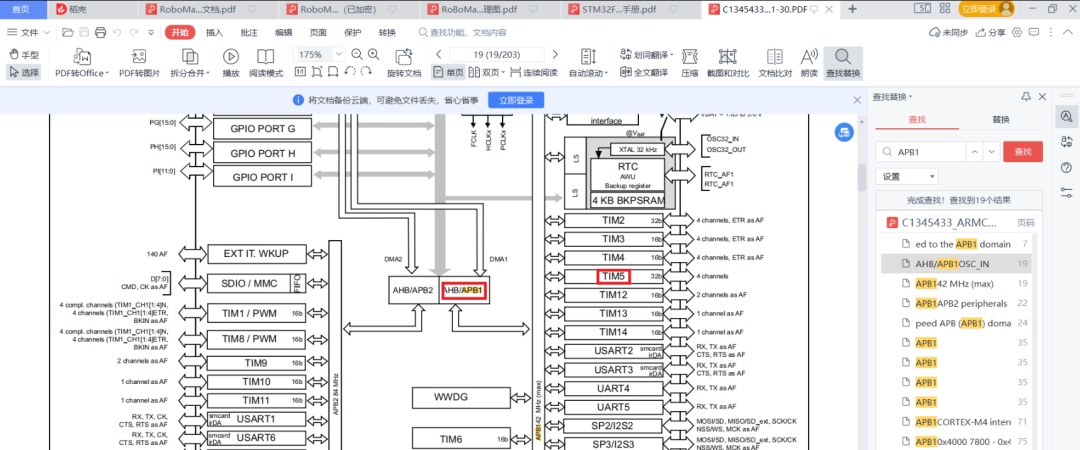
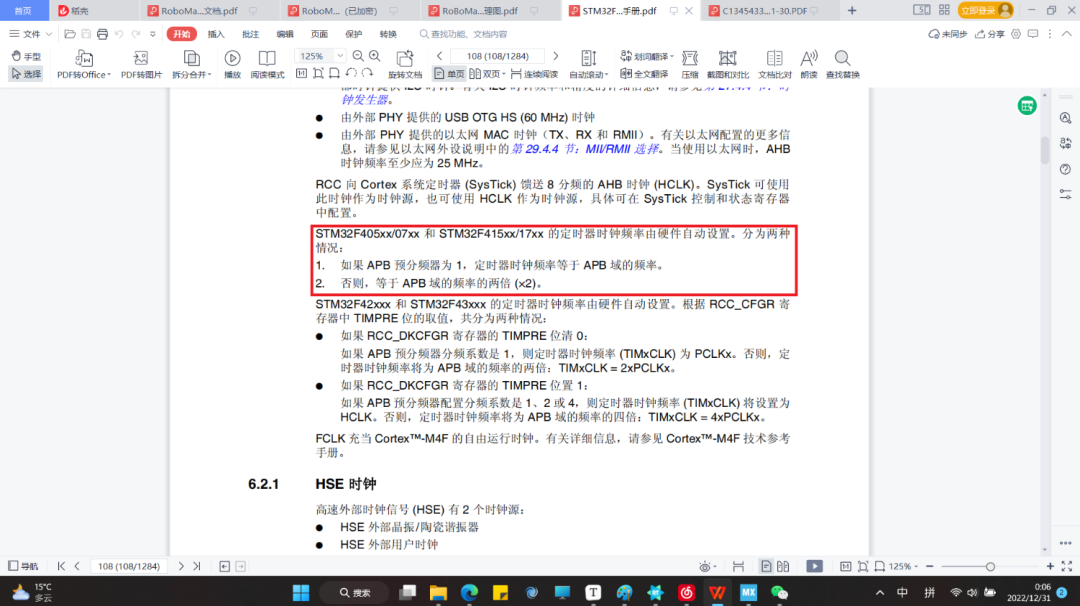
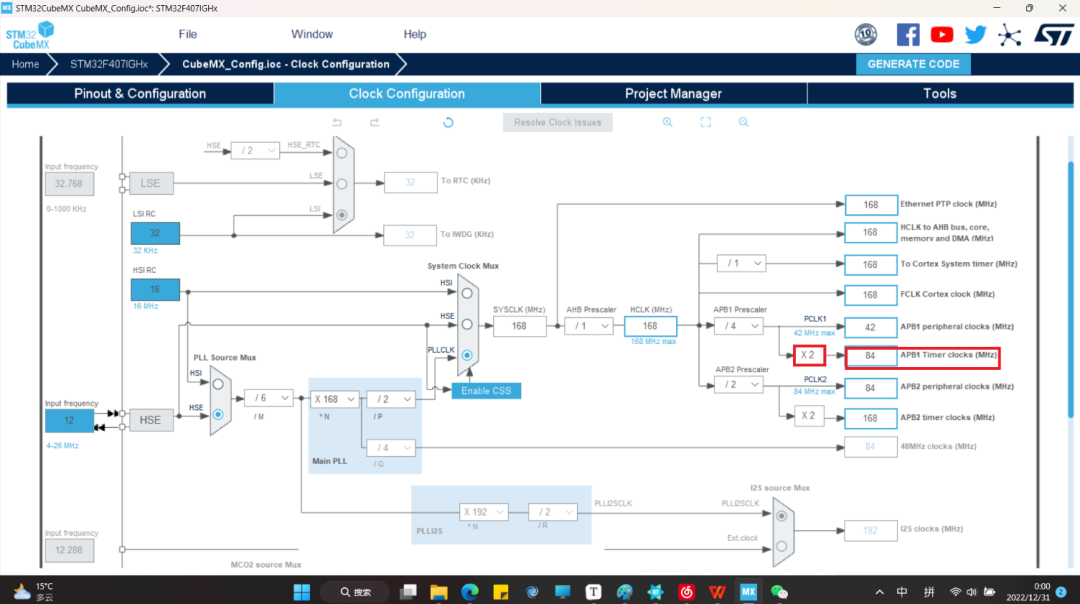
接着我们就要看CubeMX上我们配置的时钟树了,在整个时钟树的最右端,可以看到 APB1 和 APB2 两个总线的时钟频率设置,其中 APBx peripheral clocks 为挂载在总线上的定时器以外的外设提供时钟源,APBx timer clocks 为挂载在总线上的定时器提供时钟源。那么这里我们就可以知道TIM5时钟源频率为84MHz,时钟树的配置在上篇文章有较为详细的解释,这里就不重复了。这里解释一下前面的倍频为何是2,这里可以看到STM32F4xx中文参考手册,我们这里APB1预分频器为4,所以定时器时钟频率等于APB域的频率的两倍,所以倍频为2
确定时钟源频率之后,我们就开始计算定时器触发频率,我们前面设置TIM5_PSC为0,因此分频值为1,因为分频值为 TIMx_PSC 中的分频值+1(毕竟分频不可能为0),所以我们进入的84MHz的频率信号分频后还是84MHz。
当 TIMx_CNT 的值增长到 TIMx_ARR 中的值后,就会发生重载,并触发中断信号,相当于使用 TIMx_ARR 中的值又进行了一次分频。因此产生这个中断信号的频率应该为84MHz/(ARR+1)(需要加 1 是因为 CNT 是从0开始计数的)。我们上面设置的重载值为65535。
因此定时器触发频率为84000000/65536=1281.7Hz,相当于0.78ms会触发一次中断信号。这个中断信号我们还可以用来做一些比如LED灯定时器亮灭等操作,由于篇幅原因中断相关知识这里就不过多的展开了。这里定时器中断触发时间也就是PWM信号周期。
占空比的计算
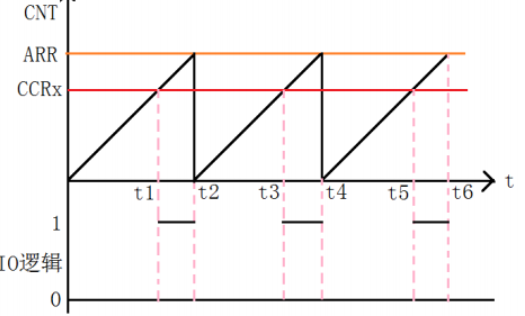
上文我们讲到了PWM一大重要参数就是占空比,而我们设置占空比的重要方式就是设置比较寄存器的值。毕竟我们不能随便重设重载值,这样子PWM周期也会发生变化。那么比较值是起到怎样的作用呢?下图就可以解释,下图为递增计数模式的示意图,当定时器以 PWM 模式工作时,会自动将 TIMx_CCRx 的值与 TIMx_CNT(计数寄存器)中的值做比较,当 TIMx_CNT 中的值小于 TIMx_CCRx 的值时,PWM 输出引脚输出高电平,大于时则输出低电平。
那么我们就可以知道占空比的计算公式为CCRX/ARR*100%,比如重载值为50000,比较寄存器值为25000,那么占空比为50%。
原理部分就到此为止下面就讲一下在RT-Thread Studio中的操作。
代码实践
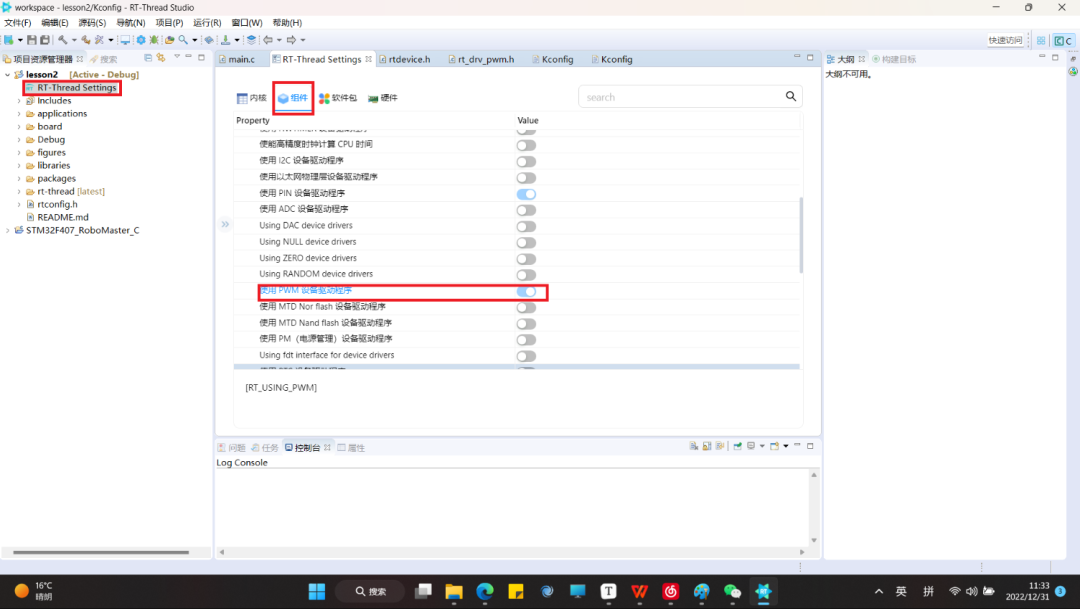
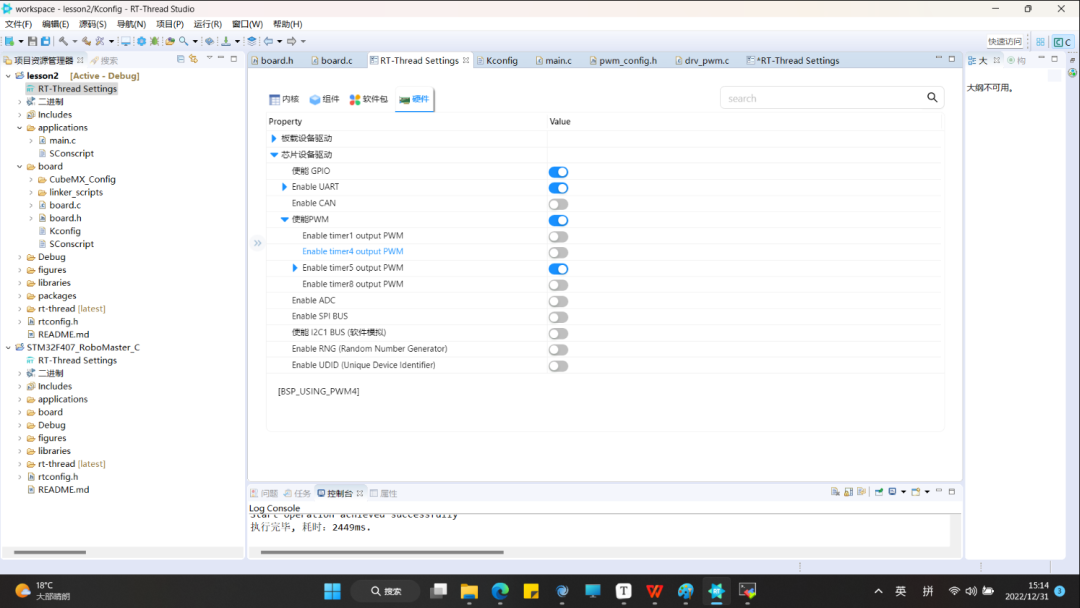
首先我们选择使用PWM设备驱动程序
然后我们需要在硬件中选择使能PWM并且选择相应的定时器与通道,但是我们发现并没有我们需要的timer5,这时候我们就需要修改Kconfig文件了。
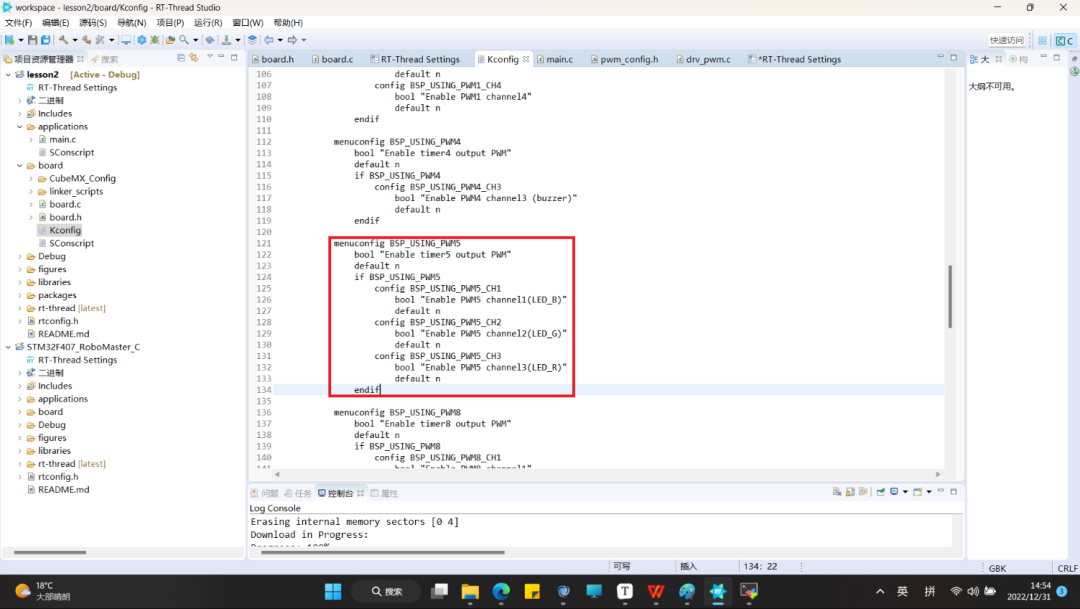
我们在board/Kconfig中添加如下代码,这里我们简单的修改其他PWM配置即可。
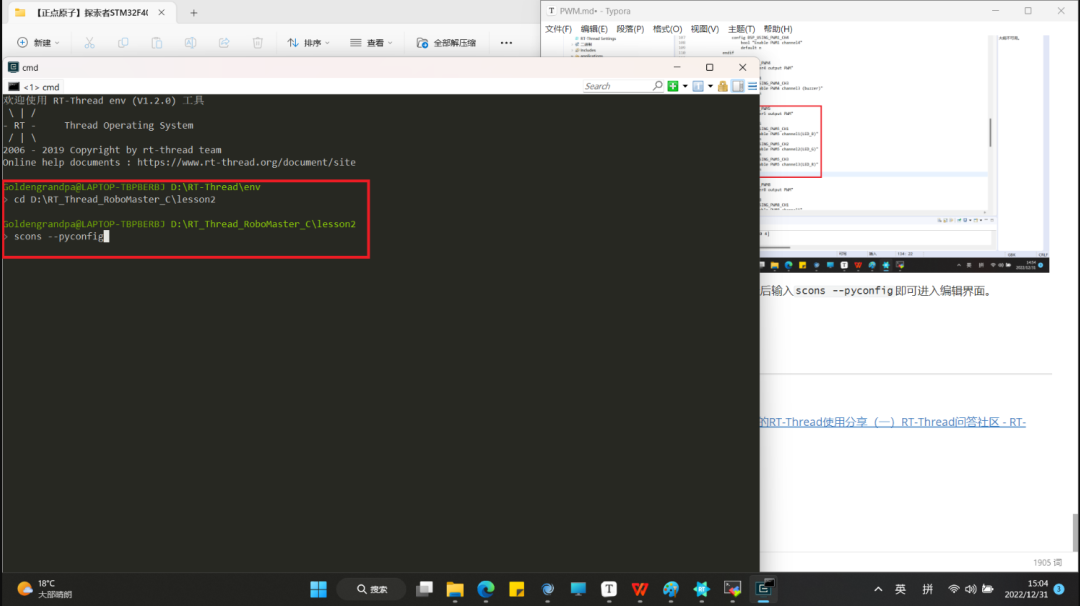
之后我们使用Env工具进入工程所在目录后输入scons --pyconfig即可进入编辑界面。
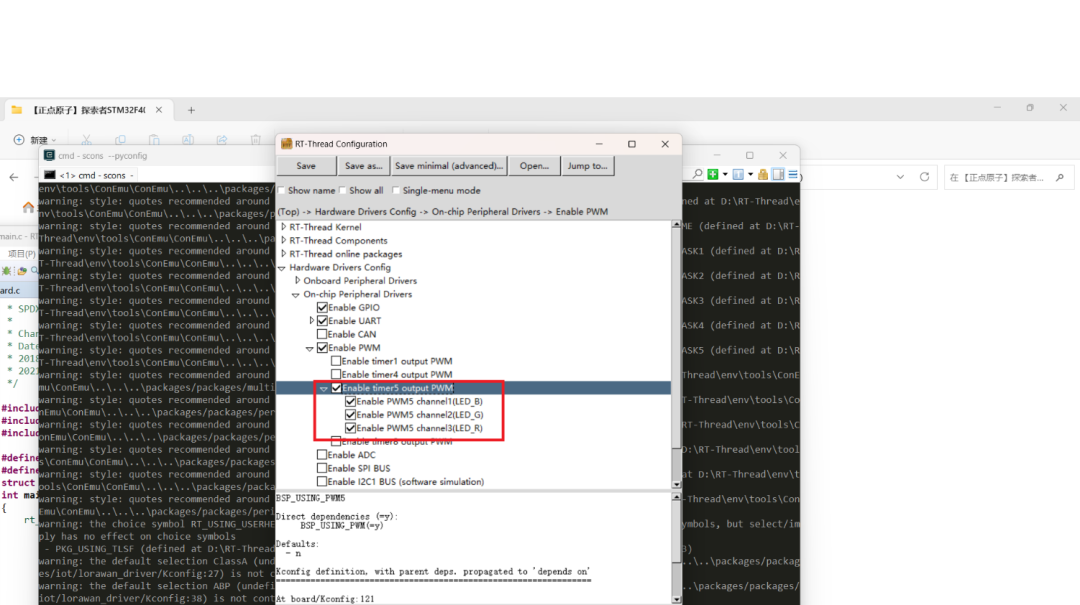
这里我们就可以看到我们在Kconfig中添加的外设,点击使能,保存修改。
之后输入scons --target=eclipse重新构建工程,等号后面的参数取决于你使用的IDE,比如我原来使用的是Clion那么就输入scons --target=cmake,RT-Thread Studio是基于eclipse的所以这里选择scons --target=eclipse
回到RT-Thread Setting可以看到我们增加的外设了。
关于基于开发板工程添加外设相关操作大家可以参考这篇文章。
rt-thread/STM32系列外设驱动添加指南.md at master · RT-Thread/rt-thread (github.com)
之后我们就可以在main函数中编写代码,实现呼吸灯的功能了。
这里就是简单的修改了官方的PWM例程代码,我自己就不过多的说明了,大家可以看看注释以及官方文档PWM设备 (rt-thread.org)
1/*
2*Copyright(c)2006-2021,RT-ThreadDevelopmentTeam
3*
4*SPDX-License-Identifier:Apache-2.0
5*
6*ChangeLogs:
7*DateAuthorNotes
8*2018-11-06SummerGiftfirstversion
9*2021-06-30craztmodifyforrobomasterCboard
10*/
11#include
12#include
13#include
14#definePWM_DEV_NAME"pwm5"/*PWM设备名称*/
15#definePWM_DEV_CHANNEL1/*PWM通道*/
16structrt_device_pwm*pwm_dev;/*PWM设备句柄*/
17intmain(void)
18{
19rt_uint32_tperiod,pulse,dir;
20period=500000;/*周期为0.5ms,单位为纳秒ns*/
21dir=1;/*PWM脉冲宽度值的增减方向*/
22pulse=0;/*PWM脉冲宽度值,单位为纳秒ns*/
23/*查找设备*/
24pwm_dev=(structrt_device_pwm*)rt_device_find(PWM_DEV_NAME);
25if(pwm_dev==RT_NULL)
26{
27rt_kprintf("pwmsamplerunfailed!can'tfind%sdevice!
",PWM_DEV_NAME);
28returnRT_ERROR;
29}
30/*设置PWM周期和脉冲宽度默认值*/
31rt_pwm_set(pwm_dev,PWM_DEV_CHANNEL,period,pulse);
32/*使能设备*/
33rt_pwm_enable(pwm_dev,PWM_DEV_CHANNEL);
34while(1)
35{
36rt_thread_mdelay(50);
37if(dir)
38{
39pulse+=5000;/*从0值开始每次增加5000ns*/
40}
41else
42{
43pulse-=5000;/*从最大值开始每次减少5000ns*/
44}
45if(pulse>=period/2)/*经过测试发现占空比超过50%后对于亮度的影响较小因此就设置死区*/
46{
47dir=0;
48}
49if(0==pulse)
50{
51dir=1;
52}
53/*设置PWM周期和脉冲宽度*/
54rt_pwm_set(pwm_dev,PWM_DEV_CHANNEL,period,pulse);
55}
56returnRT_EOK;
57}
最终烧录效果为蓝灯进行呼吸灯操作。
后续有空的话,我会写一篇小文章扩展教大家PWM进行呼吸灯aRGB调色,以及蜂鸣器唱歌的。
本次教程就讲到这里谢谢大家。
———————End———————
版权声明:
本文为RT-Thread论坛用户「goldengrandpa」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:
https://club.rt-thread.org/ask/article/2240be90085f3b35.html
你可以添加微信:rtthread2020 为好友,注明:公司+姓名,拉进RT-Thread官方微信交流群!

爱我就给我点在看
点击阅读原文回看开发者大会
-
RT-Thread
+关注
关注
31文章
1317浏览量
40744
原文标题:基于RoboMasterC型开发板的RT-Thread使用分享(二)
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Deepseek上单片机?RT-Thread上跑通大语言模型

RT-Thread 发布 EtherKit开源以太网硬件!
RT-Thread上CAN实践
基于恩智浦FRDM-MCXA153开发板实现RT-Thread的ADC驱动
开源共生 商业共赢 | RT-Thread 2024开发者大会报名启动!
NXP FRDM-MCXC444开发板在RT-Thread环境下的上手过程
【QEMU系列】不用开发板运行RT-Thread指南-ARM架构
2024 RT-Thread全球巡回 线下培训火热来袭!
【好书推荐】RT-Thread设备驱动开发指南
开发者分享 | 基于先楫RT-Thread BSP,使用CLion开发应用

6月6日杭州站RT-Thread线下workshop,探索RT-Thread混合部署新模式!
2024 RT-Thread 全球技术大会演讲议程发布!
4月25日北京站RT-Thread线下workshop,探索RT-Thread混合部署新模式
4月10日深圳场RT-Thread线下workshop,探索RT-Thread混合部署新模式!





 工商网监
工商网监
评论