 浅析拆卸KUKA机器人2轴平衡配重V1
浅析拆卸KUKA机器人2轴平衡配重V1
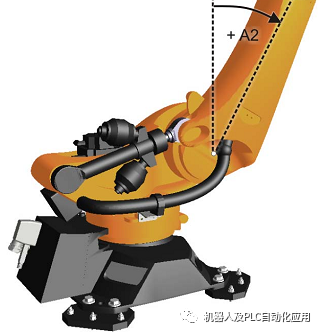
沿正向移动机器人,使间隔块落位于活塞杆上。
2. 将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。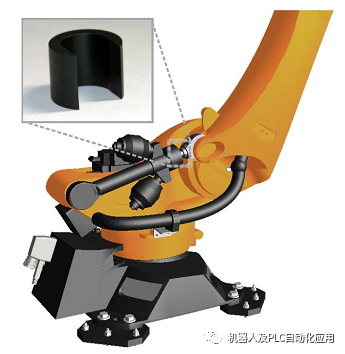

1.波纹管
2.蜗杆传动夹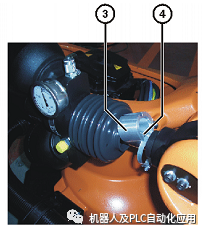
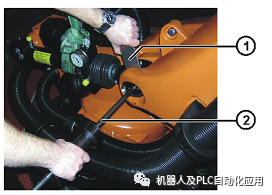
3夹紧衬套4活塞杆
3. 将大臂小心地往负向移动,直到间隔块直着固定好。
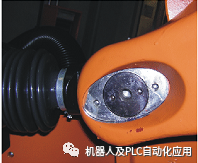
4. 用合适的设备 (如起重机)固定平衡配重。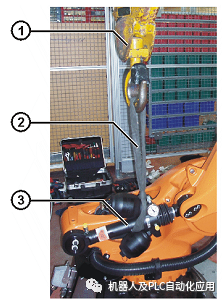
5. 拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。使用拔销器,将螺栓从大臂中拔出.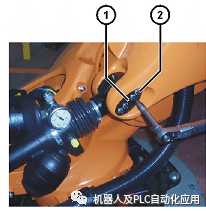

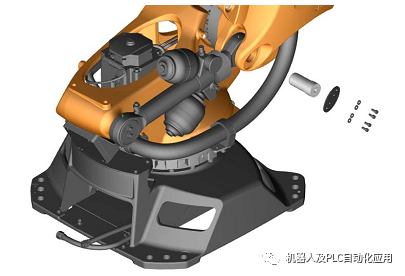
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。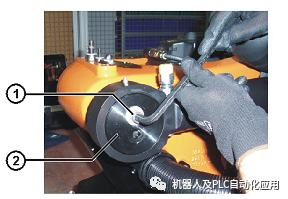
7. 将平衡配重往上抬起。其间取下止推垫圈和定距环。

8. 将平衡配重放在一块合适的垫子上。


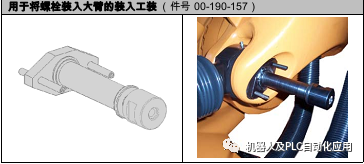
拧入2个螺纹嵌件螺栓。 将前平衡系统销紧固至平衡系统销的安装/拆卸装置,将安装/拆卸装置的固定螺钉插入前平衡系统销的外螺纹孔中。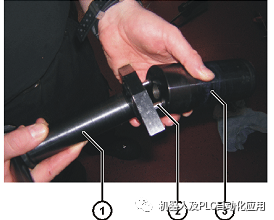
将冲击心轴插入安装/拆卸装置的手柄,并将其拧到前平衡系统销上。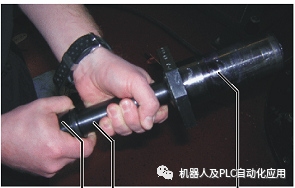
用木槌轻敲冲击心轴,敲入前平衡系统销。

安装固定板并用4个新的M8x20-10.9内六角螺钉和锥形弹簧垫圈紧固,MA=23.0 Nm。
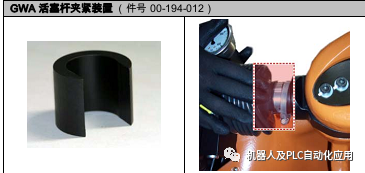
沿正方向移动连杆臂,直到松开气缸和铰接头之间的夹紧衬套,然后拆下夹紧衬套

所需的专用工具:
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28762浏览量
208979
原文标题:拆卸KUKA机器人2轴平衡配重V1
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
重要。
书中还详细介绍了支持具身智能机器人的核心技术系统,包括自主机器人计算系统、感知系统、定位系统及规划和控制系统。
本书共分5个部分。
第1部分(第1章和第
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
安川工业机器人结构
的连接线缆,也可以根据现场的实际需求来进行选配。 --机器人本体各部分组成:由图可知安川6轴工业机器人可分为机器人底座、S头、L臂、U臂、手腕法兰盘,对应一到六

焊接机器人六个轴分别是什么作用
焊接机器人是现代工业自动化中的重要工具,其灵活性和高效性极大地提升了焊接质量和生产效率。在焊接机器人中,“六轴”是一个常见的结构设计,这六个轴赋予机

如何正确操作六轴焊接机器人
一起了解如何正确操作六轴焊接机器人。 下面是一些基本的操作指南: 1. 操作前准备 设备检查:确保机器人、焊接电源和焊枪等设备状态良好,无损坏。 工件检查:确认待焊接工件的尺寸和焊接位
柔性机器人与刚性机器人区别与联系
柔性机器人和刚性机器人在结构、功能、应用场景等方面存在显著的区别,但也有一些联系。以下是它们的主要区别与联系: 区别 1.结构材料 柔性机器人:由柔性材料(如硅胶、弹性体、智能材料等)

Al大模型机器人
)大模型AI机器人采用中英文双语应用,目前的知识图谱包括了金航标和萨科微所有的产品内容、应用场景、产品的家属参数等,热卖的型号S8050、TL431、SS8550、FR107、LM321、ZMM5V
发表于 07-05 08:52
工业机器人仿真软件有哪些
功能强大的机器人仿真和离线编程软件,支持多种机器人品牌,如Fanuc、KUKA、ABB等。它提供了丰富的工具,如3D可视化、碰撞检测、路径优化等。 CoppeliaSim (前称V-R

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,本设计的实时性远大于 pc平台的视觉处理,并完成了沿机器人 X 轴方向的实时视觉跟随运动.
系统架构
1. ESR6B机器人硬件系统设计
ESR6B
发表于 05-29 16:17
六轴焊接机器人的操作流程
随着工业自动化的不断发展,焊接技术也迎来了革命性的变革。六轴焊接机器人凭借其高精度、高效率和高稳定性的特点,在众多行业中得到了广泛应用。六轴焊接机器人是一种应用于工业生产中的自动化设备

埃斯顿获首张工业六轴机器人cETLus证书
3月1日,埃斯顿自动化通过了Intertek的严格测试与审核,成功获得首张工业六轴关节机器人cETLus证书,开启迈向国际化战略的新阶段。





 工商网监
工商网监
评论