 如何选择机器人的电机?
如何选择机器人的电机?
在机器人中,执行机构一般分为液压驱动和电机驱动两种类型,其中又以电机驱动最为常见。本文主要讨论一般机器人驱动机构中电机的选择问题。
机器人中常用的电机分为有刷直流电机、无刷直流电机、永磁同步电机、步进电机等。其中在中小型机器人(尺寸在15cm-30cm)中,由于价格便宜,定位精度高,直流电机以及无刷直流电机最为常见。
本文主要讨论直流电机的选择方法。
第一部分:电机要求
直流电机简介:
在市场上,存在着多种多样的直流电机。据不完全估计,单就国内就有上千家电机生产厂家。更不要提日本、德国等老牌电机生产强国。即使对于一个很小的直流电机,它都具有复杂的内部结构和大量的产品资料。这里,我们仅从机器人的角度出发考虑其对电机性能的要求。
电机的选择往往是我们对于电机性能的要求与我们可以接受价格的折衷。因而,在电机选择过程中,我们需要整体考虑电机的各个参数,从中筛选出对我们重要的参数,结合我们的需要,选择合适的电机。
对于一个电机来说,其往往具有多条运行特性曲线,这里我们将列出其中最重要的一些特性,然后对这些特性进行一些解释。对于一个电机,从机器人驱动的角度,我们主要的关心的有:
a) 工作电压——对于一个电机来说,可能会存在多个电压参数;其中最为常用的为连续运行条件下的额定电压;一些电机可以在额定电压之上以超过额定转速和转矩的方式运行,但是运行一段时间后可能会出现局部过热问题;也就是说部分过电压仅可以短时运行,而不可以长期运行;
b) 转速——电机旋转速度,一般单位为转每分钟,有时也使用弧度每秒或者角度每秒表示;
c) 转矩——电机改变旋转速度的能力;如当使用扳手拧动螺丝时,扳手的转矩使得螺丝旋转;在机器人领域,转矩一般用于使得机器人移动或者使得机械臂完成各种动作;转矩等于力与力臂的成绩,其单位为Nm;
d)电流——对于一个电机,可能存在多个电流参数,如空载电流、额定电流以及堵转电流等;
e)物理参数——如电机尺寸、电机轴尺寸、截面尺寸以及固定孔的位置等;
f)其他参数——一些电机还会提供一些其他的部件,如编码器、制动器、齿轮箱、基座等等;
直流减速电机:
显而易见的,直流电机供电电流为直流,因而,其可以使用电池进行供电;这也是直流电机在机器人中广泛应用的一个原因;小型直流电机可能在尺寸上不同,但是在基本参数上一般是一致的;直流电机的旋转方向可以通过改变供电电压的符号来改变;
小型直流电机一般运行在高速低转矩运行范围内,这与机器人中电机驱动要求是矛盾的;机器人领域通常要求电机运行在低速大转矩范围内;因而,为了降低电机转速同时提高电机转速,一般在电机与输出轴之间增加轴系,即减速器;通过组合不同的减速器,电机可以获得不同的额定转速与额定转矩;目前市面上购买的直流电机很多出厂时已经带有减速器,因而常成为直流减速电机;
减速电机的优势在于:使用简单、输出转矩高、转速低、可供选择范围大。
主要缺点在于精度较低,即使是同一厂家生产的同一批次的减速电机,施加相同的电压或者电流,那么减速电机的输出也有可能不同;因而,在机器人应用中,对减速电机进行控制时一般需要引入转速闭环控制,而不能使用开环控制;
下面是选择减速电机时需要考虑的一些常见的因素:
a)通用性——一般而言,电机通用性越强,价格约便宜;
b)工作电压——一般小型减速电机工作范围为6-24V;
c)输出转矩——一般小型减速电机输出转矩在0.1-0.5Nm之间;一般可以用于驱动在20-30kg的机器人;
d)转速——电机转速将与轮胎尺寸决定机器人最大运行速度;一般轮式机器人中,轮胎尺寸在5-20cm之间,其中以6-10cm最为常见;
虽然大部分减速电机都是可以正反转的,但是也有些减速电机只可以单方向旋转。另外,虽然减速电机一般具有很多参数,但是从机器人的角度来讲,许多参数如电机轴的转动惯量等我们一般并不关注。对于机器人应用减速电机最重要的参数为电机转速、转矩和额定电压。
下面是一个淘宝上某款减速电机的例子:
其参数为:
品牌:** 安装方式:卧式 级数:3级 齿面硬度:硬齿面 布局形式:同轴式
减速比:103 额定电压:24V 额定转速:131RPM
空载转速:155RPM 额定转矩:0.014Nm 峰值转矩:0.075Nm
电机尺寸:
电机直径:20mm 电机长度:45.5mm 输出轴直径:4mm
输出轴台阶高度:0.5mm 输出轴长度:11mm
通过产品介绍,我们可以看到产品的型号、控制转速、额定转速、额定转矩等。在进一步的讨论减速电机之前,我们首先确定一下机器人中对电机参数的具体要求。
电机参数要求:
首先我们需要确定机器人的运行环境,如机器人主要运行于室外还是室内,光滑地面还是粗糙地面,需不需要爬坡等等。其次,我们需要确定机器人的具体机械参数,如大小、重量等等。接下来就需要确定机器人运行的一些参数,如运行速度以及转矩。
电机通过驱动机器人轮胎从而使得机器人运动。机器人的运动速度主要取决于电机转速与轮胎直径。而电机的旋转速度取决于输入电压和其负载转矩。在相同供电电压下,空载时电机旋转速度要高于负载时旋转速度。在相同供电电压下,电机所需要出力越大,那么电机转速越低,电机电流越大,当出力增大到一定程度时,电机将会停止旋转,也就是堵转。此时,电机电流最大,电机长时间堵转将会引起电机温度上升,严重时会造成电机损坏。
机器人轮胎速度与电机旋转速度关系为:
V=0.02*pi*w*R/60;
其中:V为机器人运行速度(m/s);
w为经过减速器后电机旋转速度(rpm);R为电机半径(cm);
假设我们要求机器人运行平均速度为Vavg,那么要求减速电机转速为:
w=60*Vavg/(0.02*pi*R) (1)
电机转矩要求:
电机转矩要求主要有机器人运行地面摩擦、坡度有关。
假设机器人运行地面摩擦因数为C,机器人质量为m(kg),此时机器人在地面匀速运行要求转矩为:
T=0.01Ff*R=0.01C*mg*R;
其中Ff为摩擦力(N),R为轮胎半径(cm);
在匀速运动之外,可能我们还会规定机器人的最大爬坡角度theta以及要求的最大加速度a等,此时,可以将两者等效为摩擦,此时:
C=C0+sin(theta)+a/g;
其中,C0为固有的地面摩擦系数,theta为最大爬坡解读,a为最大加速度,g为重力加速度;
T=0.01CmgR;(2)
上述1式和2式即为机器人电机转速和转矩选择方法。
第二部分:电机运行条件
当直流电机开始供电时,电机轴尚未开始旋转,此时点击处于堵转状态,电机电流最大为iS,电机所产生的转矩也最大;因而,电机开始旋转,此时,随着电机转速上升,由于电机反电势增大,电机电流下降,转矩下降,当电机转矩与负载转矩相等时,电机达到平衡状态,即为平衡状态电机转速。
电机平衡状态指的是电机转矩与负载转矩相等,在机器人中,负载转矩主要包括摩擦、爬坡、加速等因素。
在机器人应用领域中,我们往往比较关心电机在不同负载条件下所能达到的最高转速。
如,空载条件下,电机所能达到的最大转速,空载转速为w0;在负载条件下,电机堵转时所能产生的转速为最大转矩,堵转转矩为Ts;
其他条件下,电机运行在两者之间的线性连线上;
即如果负载转矩为T,那么此时,电机最高转速为:
w=w0*(1-T/Ts);
如果电机要求最高转速为w,那么此时,电机所能产生的最大转矩为:
T=Ts*(1=w/w0);
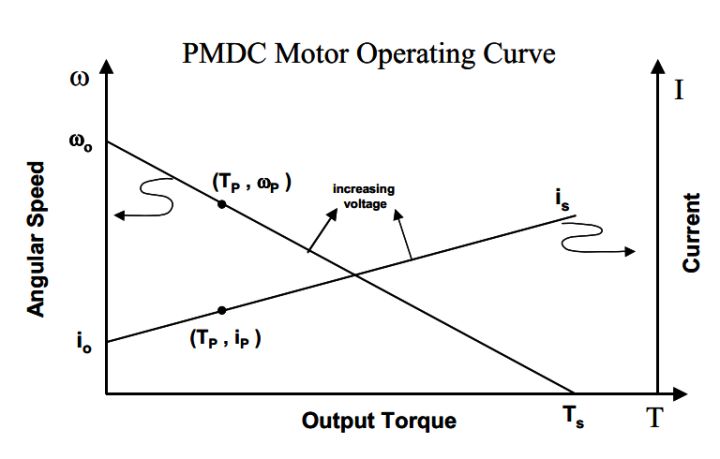
上图反映的是电机最大转速与最大转矩、转矩与电流之间的线性关系。
电机空载最高转速为w0,空载电流为i0;随着负载转矩增大,电机转速线性下降,电流增大;直至负载转矩达到最大转矩,电机堵转。如果电机转矩继续增大,那么电机将处于发电状态。
在电机转矩为T时,电机电流为:
i=i0+(is-i0)*T/Ts;
其中i0为空载电流,is为堵转电流;Ts为堵转转矩;
经过上述讨论,我们可以得出这样的结论,在选择减速电机时,应该首先重点考虑如下几个参数:
电机运行电压、空载转速、一定转矩下的转速、一定转矩下的电流。
1. 电机运行电压:选择电机运行电压时,我们需要选择一个和机器人电池对应的电机运行电压。大部分电机运行电压为6V,12V,24V.对于一般尺寸在15cm-30cm的机器人,一般使用镍氢电池,对于大型机器人,一般使用铅酸电池;镍氢电池一般为标准AA,C,D尺寸,电压在3.6-48V不等。对于12V电机,一般使用7.2V或者9.6V供电;对于24V电机,一般使用3*9.6V供电。
2. 电机转速:对于电机转速的估计,我们一般选择在额定电压和额定转矩下,所能满足条件的电机转速,对于一般轮胎尺寸在5-20cm之间的机器人来说,电机转速范围一般从40-300rpm;
3.电机转矩:选择电机转矩时,我们一般在上一部分计算的基础上留有50%的裕量;另外,如果电机数量多于一个,一般可以对电机转矩要求除以相应的数量。
4.电机电流:电机电流将决定机器人运行时间,一般根据电机电流数据,我们能够大概评估其应用范围,如一个电机电流为0.01A,那么对于绝大多数机器人场合,电机都将太小;相反,如果电机额定电流为1A,那么电机将会太大;
另外,选择时还需要注意根据机器人本体的尺寸确保电机能够安装。另外,还要根据控制精度要求,选择合适的位置传感器-光电码盘或者旋转变压器等。
第三部分:机器人电机选择举例
这里以笔者正在开发的一款移动机器人平台为例,详细说明电机的选择过程。
机器人平台大概如上图所示,重4kg,要求最快运行速度为1m/s,两台电机驱动其行走,最大爬坡角度为5度,电机供电电压为24V,轮胎轮胎直径为65mm。
1. 转速要求:Speed=60*Velocity/(PI*d)=290rpm;
2.转矩要求:对于电机转矩要求,由于整体系统重量为4kg,假设摩擦系数为0.03,此时点击转矩为:
T=Ff*R=(0.03+sin5)*4kg*9.8kgm/s^2*32.5*10^-3m=100mNm; 将其分担到两个电机上,此时每个电机转矩为50mNm.
初步减速电机参数为:转矩:50mNm,转速290rpm.
淘宝上选择几款电机如下:
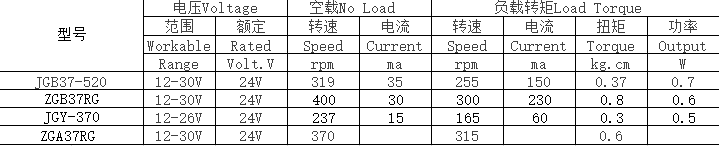
然后可以根据其他的一些机械或者价格因素决定最终电机选型。
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28453浏览量
207248 -
直流电机
+关注
关注
36文章
1710浏览量
70206
原文标题:解读 | 如何选择机器人的电机?
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
智元与汇川加码,机器人如何利好电机市场?
动力储能电池大容量 24V200Ah 磷酸铁锂电池:机器人的强大动力源

FOC电机在机器人技术中的作用
工业机器人常用的编程方式
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
Al大模型机器人
步进电机在工业机器人中的应用
机器人舵机:关键要素解析与选择指南






 工商网监
工商网监
评论