 数字PFC控制:为电机控制系统监控增加价值
数字PFC控制:为电机控制系统监控增加价值
功率因数校正(PFC)对于主要工业电机驱动器越来越重要,因为市电侧对谐波含量的调节增加,以及与效率、电压质量和导体额定值相关的额外附带好处。数字PFC控制器比模拟控制器成本更高,而且可能更复杂。但是,当与主电机控制处理器的功能一起考虑时,它们可以提供重要的价值并增加整个系统设计的背景。本文重点介绍数字PFC控制器在工程师的整体系统监控、保护和排序环境中提供的系统级优势。在实际电机控制系统平台中的实现通过硬件和软件框架方面的数字和/或图表显示,并进行实验验证。
功率因数校正(PFC)对于工业电机驱动器变得越来越重要。这主要是由于公用事业方面对谐波含量的监管增加。然而,从整体系统效率提高、导体额定值和配电电压质量提高的角度来看,实施PFC也有充分的理由,这对于工业环境中的其他负载(例如直接在线感应电机和变压器)可能很重要。PFC可以通过有源电路拓扑来实现,例如单相[1]或3相升压整流器[2]或通过无源方法,其中涉及明智地使用低频电感器和电容器来塑造交流线路电流包络。两种形式的PFC都试图重现正弦或近似正弦线路电流,与线路电压同相,从而最大限度地减少产生谐波电流和来自公用事业的无功功率流的损耗。主动和被动PFC之间的权衡与成本、被动元件重量、体积和PFC相关损耗有关。
在单相电机驱动器中,主动式PFC通常被公平接受。对于三相系统,无源谐波校正目前更受欢迎,通常涉及三相线路中的50 Hz至60 Hz大电感,或整流器直流侧的单个电感。然而,在更高功率下转向有源PFC具有优势。有源PFC解决方案(直流或交流侧)在电感尺寸、更低的功率损耗、更轻的重量和最佳的功率因数方面提供了最佳解决方案。
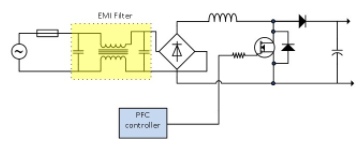
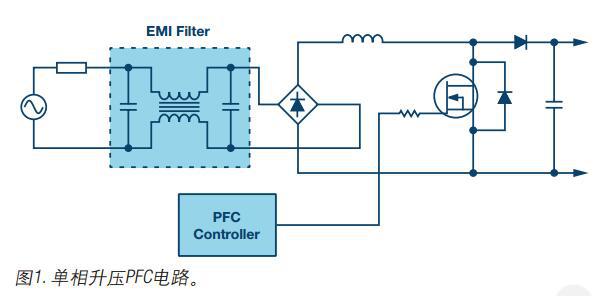
在单相应用中,如低功耗电机驱动器,整流器输入升压转换器(如图1所示)是默认设置。
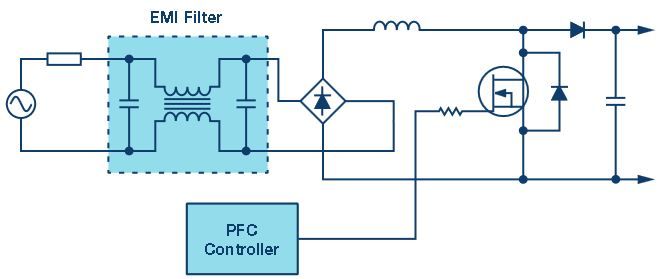
图1.单相升压PFC电路。
这些器件的开关频率通常在50 kHz至100 kHz范围内,因此需要比无源解决方案小得多的直流侧电感。对于三相系统,可以使用涉及交流侧或直流侧高频电感器的单开关拓扑。
实施PFC控制的障碍之一是与PFC电路和PFC控制器相关的额外成本。在处理器位于隔离栅的安全超低电压 (SELV) 侧的系统中尤其如此。在这种情况下,由于需要将交流侧测量和控制信号与处理器I/O和ADC隔离开来,因此从主电机控制处理器内部实现PFC控制可能会带来额外的复杂性和成本。此外,从通常经过优化的处理器实现 50 kHz 至 100 kHz PWM 控制,以服务于 10 kHz 至 20 kHz PWM 频率的电机控制应用可能很难匹配。
在这种情况下,一种选择是使用廉价的模拟PFC控制器,例如UC3854 [3],并使其完全独立于主系统控制器运行。但是,通过将ADP1047 [4]等数字PFC控制器与电机控制处理器和数字隔离器结合使用,可以实现附加值。然后,处理器可以将部分排序、监控和保护功能卸载到 PFC 控制器,并以更低的成本增强整个系统功能。这种安排可用于以下方面:
启动和关断排序
系统级状态信息
用户界面显示信息
监测异常情况
最大限度降低传感器要求
备份测量/冗余
作为整体系统故障保护的一部分
控制器优化(通过效率)
典型数字PFC控制器部分的潜在系统监控、保护和排序覆盖范围如图2所示。从系统设计的角度来看,在主处理器的控制和监督下利用ADP1047等器件的集成功能的优势是显而易见的。尽管PFC控制器本身可能比模拟控制器更昂贵,但总体系统成本、复杂性和传感器数量可以降低。
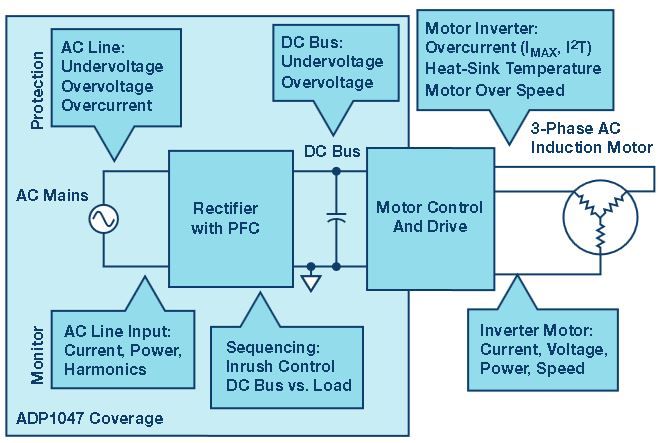
图2.电机控制系统中的数字 PFC 控制器覆盖范围。
硬件平台
ADI公司提供了一个实验平台,用于在实际电机控制系统中验证其信号链组件和软件工具。该平台的电路架构如图3所示,平台硬件本身如图4所示。
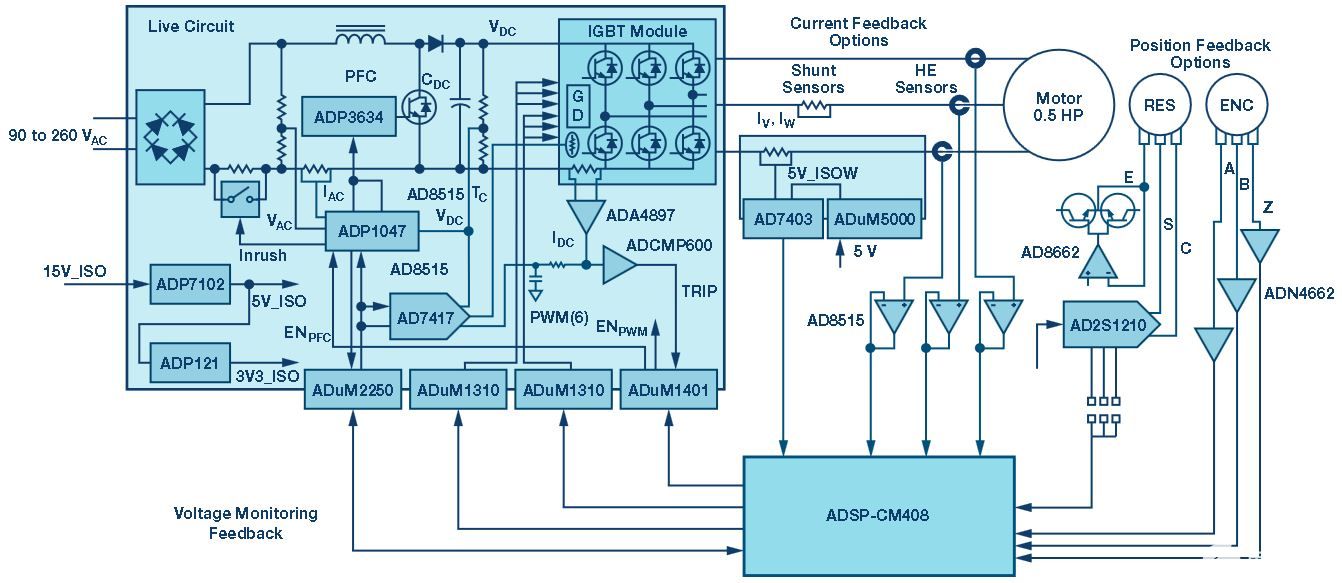
图3.通用交流输入电机控制平台。
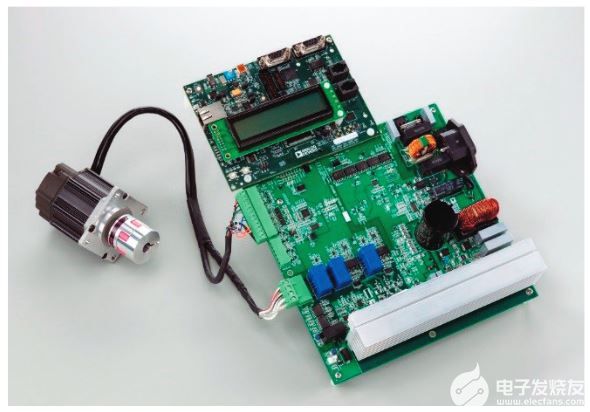
图4.电机控制平台硬件。
该系统代表功能齐全的PMSM电源输入电机驱动器,具有功率因数校正,完全控制,通信信号隔离和光学编码器反馈。该系统的核心是ADI公司的ARMCortex-M4混合信号控制处理器ADSP-CM408。PFC前端控制由ADP1047执行,具有精确的输入功率计量功能和浪涌电流控制。ADP1047专为单相PFC应用而设计;ADP1048专为交错式和无桥PFC应用而设计。数字PFC功能基于传统的升压PFC,将输出电压反馈与输入电流和电压相乘,为AC/DC系统提供最佳的谐波校正和功率因数。所有信号都转换为数字域,以提供最大的灵活性;所有关键参数均可通过PMBus进行报告和调整®®™接口。ADP1047/ADP1048允许用户优化系统性能,在整个负载范围内最大限度地提高效率,并缩短设计上市时间。灵活的数字控制PFC引擎和精确的输入功率计量相结合,有助于采用智能电源管理系统,这些系统能够做出决策以提高最终用户系统效率。该器件通过在轻负载时可编程频率降低和在轻负载时降低输出电压的能力,支持进一步提高效率。ADP1047/ADP1048提供增强的集成特性和功能;浪涌电流和软启动控制功能可显著减少元件数量,并易于优化设计。这些器件专为高可靠性、冗余电源应用而设计,并具有广泛而强大的保护电路。它们还具有独立的过压保护 (OVP) 和过流保护 (OCP)、接地连续性监控和交流检测。提供内部过热保护(OTP),可通过外部检测设备记录外部温度。
系统操作
处理器和 PFC 控制器之间的通信通过 I2C/PMBus 接口,带 I2C数字隔离器提供域之间的接口。如图 5 所示。处理器位于 SELV 电气域中,PFC 控制器以高压域中的直流总线共轨为参考。三相逆变器的栅极驱动器开关信号通过2通道隔离器从处理器PWM模块路由。I 的数据和时钟信号2C接口和通用数字信号也通过数字隔离器进行路由。
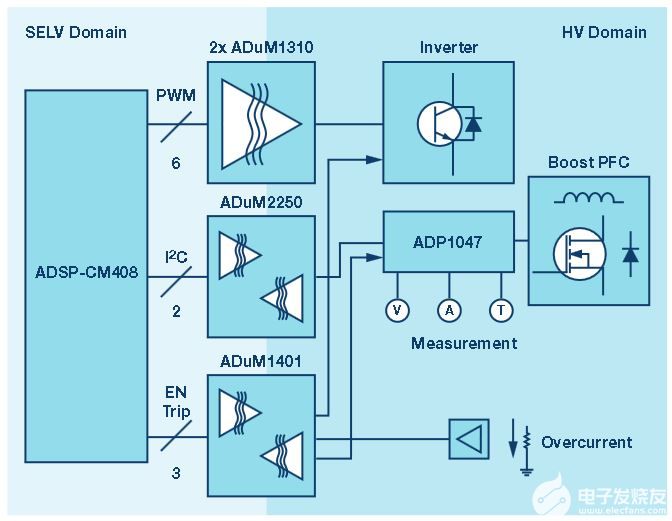
图5.数字信号隔离。
PFC 控制器管理升压 PFC 电路的控制和监控。这些任务从主电机控制软件工作流程卸载到低优先级例程中,如图6所示。PFC 控制器参数在启动期间配置。通常可以通过将配置参数写入控制器IC上的EEPROM存储器(如果具有此功能)来跳过此步骤。如图6所示,在典型的电机控制系统中,速度和电流测量以及PWM控制器更新将在高优先级中断中处理,其中电流测量与PWM信号同步。PFC 控制器可以设置为处理输入侧测量,例如输入交流线路电压和电流、直流总线电压、输入功率和 PFC 电路温度。这些测量对于电机控制算法并不重要,无传感器算法中的直流总线电压测量可能除外。然而,它们对于整体系统级监控和控制器优化非常重要。因此,可以在低优先级 I 内请求和处理它们2C数据处理任务或中断例程,并以调度速率与系统监控时间常数相匹配。
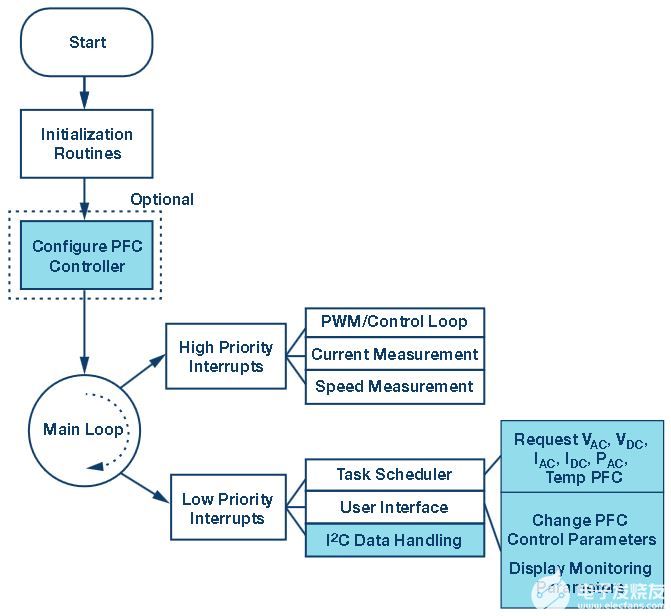
图6.主电机控制程序结构。
微粒探针™该平台的用户界面如图7所示,其中直流总线基准电压已设置为250 V。交流和直流侧变量的监控与电机控制相结合,清晰可见。

图7.用户界面。
结论
随之而来的处理器上额外传感器、数字 I/O 和模拟引脚的节省,以及测量变量缩放和解释的软件开销,可能意味着处理器成本的降低,因为能够选择性能较低的变体,或者为其他产品释放处理器硬件和软件占用空间, 更高优先级或系统增强功能。
在本例中,系统相对于交流线路电压的启动时序、直流母线欠压、过压和交流侧过流保护均由PFC控制器处理。但是,在这方面,在整个系统设计中必须谨慎,因为主控制处理器应始终了解PFC控制器正在采取的控制或保护操作,以便它不会因次要影响而采取独立操作。一个很好的例子是,由于直流总线上的瞬态过压,例如电机制动事件,PFC控制器可能会对PWM信号执行全局禁用。如果控制器没有意识到这一点,它将继续尝试调整PWM输出以保持其工作点,但未成功。如果PFC控制器在过压瞬变消失后重新启用PWM,则由于PWM占空比突然大幅增加,系统可能会发展到次级故障。因此,在管理PFC控制器和电机控制处理器之间的保护和排序通信时必须小心。
总之,选择低成本模拟PFC控制器和更昂贵的数字控制器之间的潜在权衡不仅应根据PFC电路本身进行评估,还应考虑数字控制器更高级功能可以利用的潜在系统级功能、增强功能和成本降低。本文试图以采用单相电机驱动系统的ADP1047为例,重点介绍其中的一些关键系统级增强功能。
审核编辑:郭婷
-
控制器
+关注
关注
112文章
16381浏览量
178292 -
电机控制
+关注
关注
3535文章
1880浏览量
268880 -
PFC
+关注
关注
47文章
972浏览量
106125
发布评论请先 登录
相关推荐
数字PFC控制增加了电机控制系统监控的价值
易用的PFC助益电机控制应用
数字PFC控制:实现电机控制系统监控的增值
用于电机控制系统与设计(9)
交流伺服电机在数字控制系统中的应用
基于DSP的感应电机数字控制系统设计
数字PFC控制:实现电机控制系统监控的增值
基于WPF电机控制系统监控软件

数字PFC控制实现电机控制系统监控的增值

如何为您的电机控制系统增加更多价值






 工商网监
工商网监
评论