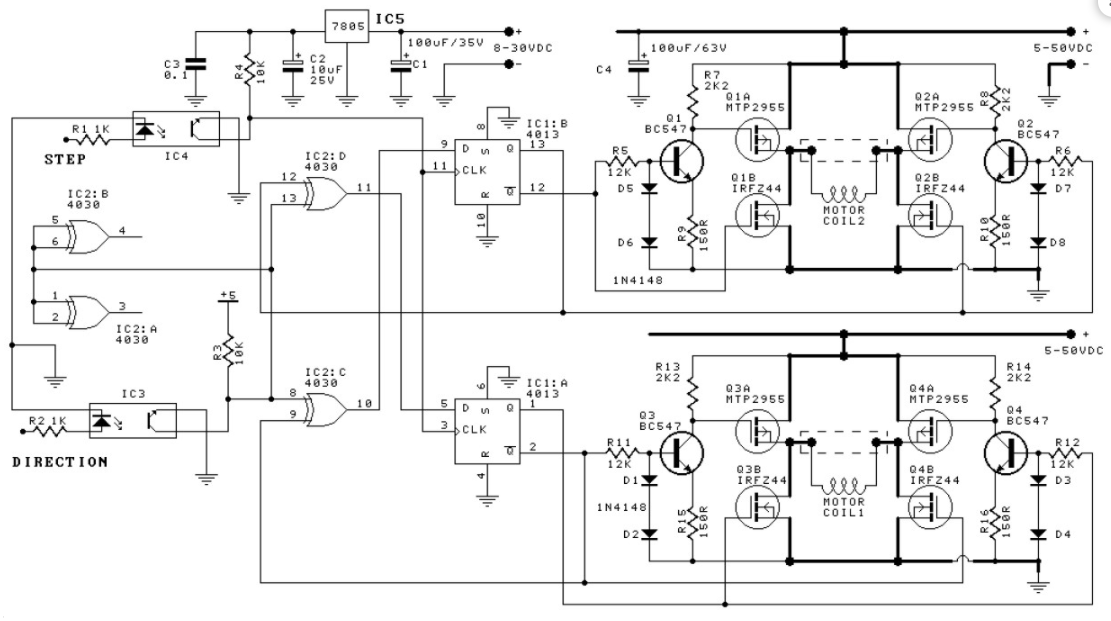
 双极步进电机驱动器的元件很少
双极步进电机驱动器的元件很少
作为步进电机复杂驱动电路的替代方案,这种方法采用纤巧的表面贴装2.8W D类音频放大器,通常驱动4W或8W扬声器。两个内部 H 桥驱动输出对 OUTR± 和 OUTL±,它们直接连接到步进电机的 A 和 B 绕组。每对承载一个标称中心频率为1.22MHz的差分PWM信号。
介绍
双极单绕组步进电机为给定尺寸提供强大的扭矩,但它们价格昂贵,并且需要八个驱动晶体管:两个电机绕组中每个四个采用 H 桥配置。由于每个晶体管必须能够承受过流和短路条件并从中快速恢复,因此典型的电机驱动器电路非常复杂且物理尺寸庞大。
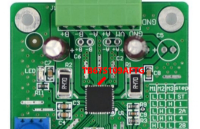
作为此类电机的替代方案,请考虑图1所示的微型表面贴装驱动器电路。低EMI、无滤波、2.8W D类音频放大器(MAX9715、U1)通常用于驱动4Ω或8Ω扬声器。两个内部 H 桥驱动输出对 OUTR± 和 OUTL±,它们直接连接到步进电机的 A 和 B 绕组。每对承载一个标称中心频率为1.22MHz的差分PWM信号。
图1.这种小型表面贴装电路驱动双极单线绕组步进电机。
电容 C1、C3、C4 和 C6 为相关的 U1 引脚提供旁路,C8–C9 将输入带宽限制为 16Hz,L2-L3 阻止长输入电缆拾取的任何电噪声。五世DD输入由C1、C2和铁氧体磁珠L1组成的PI噪声滤波器滤波。C5 和 C7 为 D 类功率放大器输出提供大容量保持电容。
合适的控制器将数字脉冲馈送到A_Step和B_Step输入,分别代表电机的左右通道。内部短路和热保护可保护放大器免受步进电机或其连接引线引起的过流和短路的影响。
表 1 显示了沿正向驱动典型步进电机所需的A_Step和B_Step脉冲序列(图 2)。(只需连续应用步骤 0 到 4。要反转电机,您可以通过从桌子底部开始向上工作来反转模式。同样,C8和C9将最小脉冲速率限制为16Hz。如果需要,您可以通过对/SHDN输入(引脚8)施加逻辑低电平来禁用放大器。
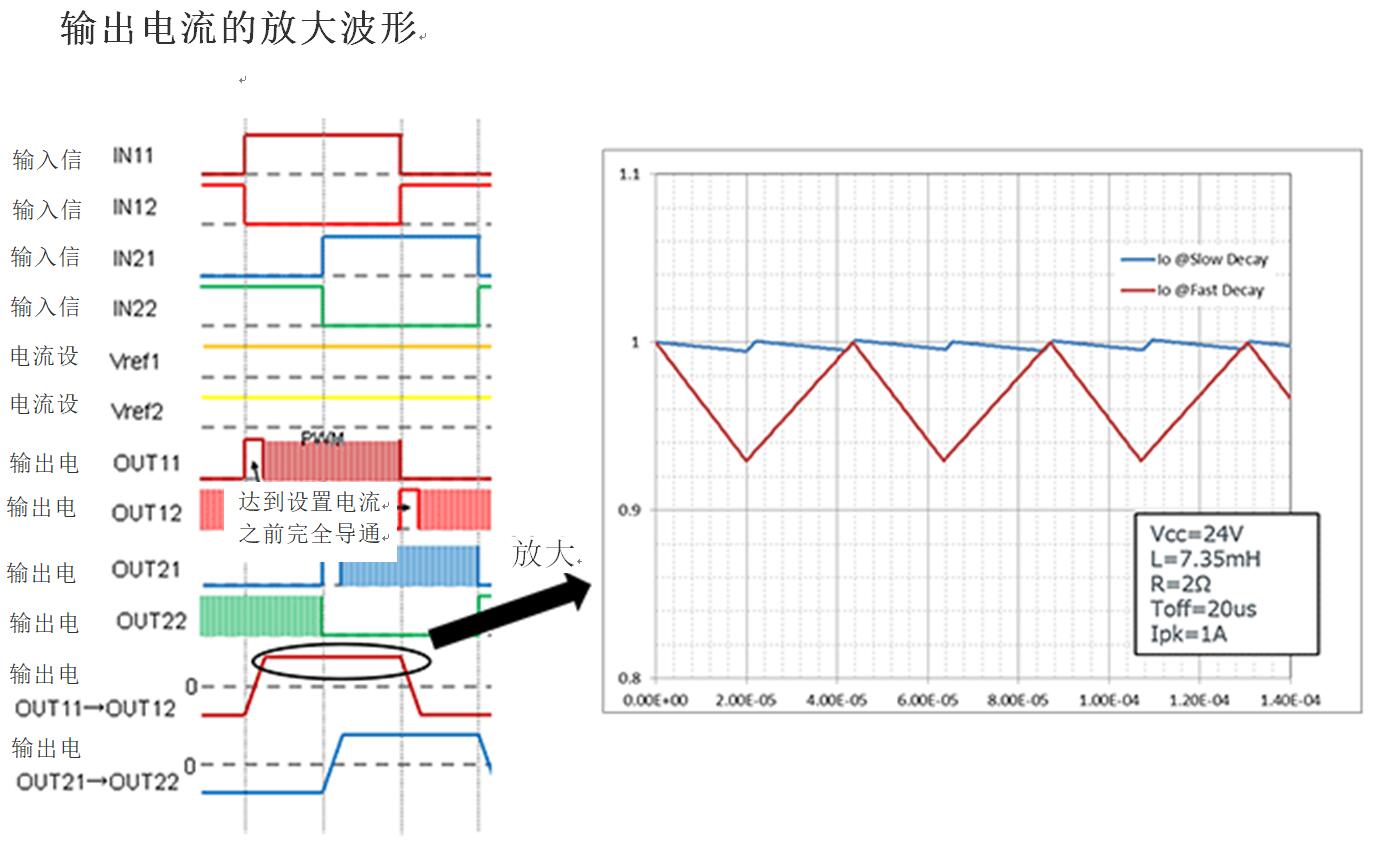
图2.图1电路的波形:A_Step输入(通道1)、B_Step输入(通道2)、OUTR+(通道3)、OUTR-(通道4)以及电机绕组实际看到的信号(OUTR+减去OUTR-),由示波器计算为“数学”。
| 步# | A_Step | B_Step |
| 0 | H | L |
| 1 | L | L |
| 2 | L | H |
| 3 | H | H |
| 4 | H | L |
审核编辑:郭婷
-
驱动器
+关注
关注
52文章
8226浏览量
146249 -
emi
+关注
关注
53文章
3587浏览量
127602 -
步进电机
+关注
关注
150文章
3109浏览量
147443
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论