 代尔夫特数据集(VOD),4D雷达、激光雷达和相机数据
代尔夫特数据集(VOD),4D雷达、激光雷达和相机数据
1、介绍
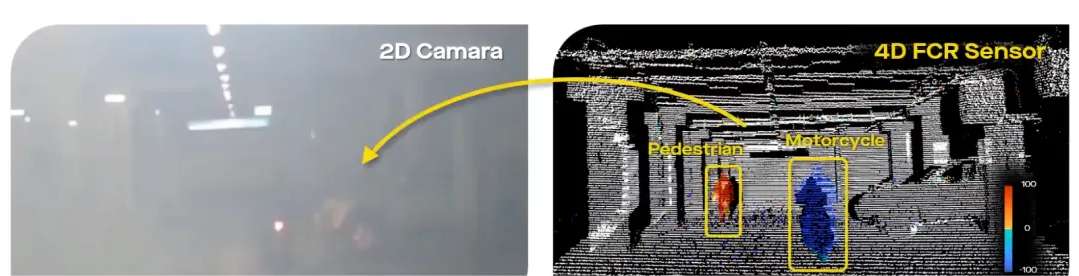
代尔夫特视图 (VoD) 数据集是一种新颖的汽车数据集,包含 8600 帧同步和校准的 64 层 LiDAR、(立体)摄像头和 3+1D 雷达数据,这些数据是在复杂的城市交通中采集的。它由超过 123000 个 3D 边界框注释组成,包括超过 26000 个行人、10000 个骑自行车者和 26000 个汽车标签。
2、传感器和数据
数据集记录了以下传感器的输出:
安装在前保险杠后面的采埃孚 FRGen21 3+1D 雷达 (∼13 Hz),
安装在挡风玻璃上的立体摄像头(1936 × 1216 像素,∼30 Hz),
屋顶上的Velodyne HDL-64 S3激光雷达(∼10 Hz)扫描仪,以及
自我车辆的里程计(RTK GPS、IMU 和车轮里程计的过滤组合,∼100 Hz)。
所有传感器均经过联合校准,有关传感器设置的一般概述,请参见下图。

该数据集仅免费提供用于非商业研究目的,使用该数据集的资格仅限于硕士生和博士生,以及学术和非营利研究机构的工作人员,可以通过填写此表格来请求访问:
https://docs.google.com/forms/d/e/1FAIpQLSdKvkuKbzmJTn8raJBAWgekAJCpaQLS_ED63sUS89Ezo61RCQ/viewform?usp=send_form
如果不想填写表格,文章末尾提供了下载方式。
Github中包含了数据解析的Python代码,以及相关的教程:https://github.com/tudelft-iv/view-of-delft-dataset。
注意事项:该数据集比较大,大约14G,下载比较耗时间。
3、数据格式
激光雷达:
激光雷达点云存储在Bin文件中,每个 bin 文件都包含 Nx4 数组形式的 360° 扫描,其中 N 是点数,4 是特征数:[x,y,z,reflectance]
4D毫米波雷达:
雷达点云存储在Bin文件中,每个 bin 文件都包含一组 Nx7 数组形式的点,其中 N 是点数,7 是特征数:
[x, y, z, RCS, v_r, v_r_compensated, time]
其中,v_r是相对径向速度,v_r_compensated是点的绝对(即自我运动补偿)径向速度。time是点的时间 ID,指示它来自哪个扫描。例如,当前扫描的点 t = 0, 而第三次最近扫描的点的 t = −2。
相机:图像存储在.jpg文件中。
4、数据读取与解析
参照说明文档的Pyhton代码即可完成读取,其中代码需要Python的环境,并安装好相关的依赖库。
https://github.com/tudelft-iv/view-of-delft dataset/blob/main/1_frame_information.ipynb
该数据集调皮哥已经解析出来了,解析过程不难,挺简单的。数据内容觉得还可以,就是单帧的点云有点少。感兴趣的朋友可以试试,用于科研(做聚类、跟踪算法、目标识别、数据融合)还是可以的,算是目前比较好的数据集了。
审核编辑 :李倩
-
传感器
+关注
关注
2551文章
51134浏览量
753831 -
激光雷达
+关注
关注
968文章
3978浏览量
189974 -
数据集
+关注
关注
4文章
1208浏览量
24712
原文标题:雷达开源数据集 | 代尔夫特数据集(VOD),4D雷达、激光雷达和相机数据
文章出处:【微信号:ZGDZGCS,微信公众号:电子万花筒】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
激光雷达技术或可助力防御无人机
激光雷达在SLAM算法中的应用综述

激光雷达的维护与故障排查技巧
激光雷达技术的基于深度学习的进步
如何提升激光雷达数据的精度
光学雷达和激光雷达的区别是什么
激光雷达点云数据包含哪些信息
引爆行业热潮,飞芯电子相干4D FMCW无人机侦测激光雷达震撼发布!
洛微科技FMCW 4D激光雷达荣获“科技先锋奖”
基于FPGA的激光雷达控制板

大陆集团的3D Flash激光雷达有何优势?

亮道智能:发布全新一代激光雷达,未来主攻固态激光雷达低价市场
中央域控雷达:4D雷达新时代






 工商网监
工商网监
评论