 相机增益的测算
相机增益的测算

公式
当相机工作在光子散粒噪声(Shot Noise)限制区时。

相机拍到的图像,亮度是以灰度值(ADU)为单位的,我们可以用图像分析软件计算出感兴趣区(ROI)的平均灰度值 Mean-ADU 和标准差 SD-ADU (即以 ADU 为单位的噪声)。
以上公式①变为。

这样,我们就可以计算出。

以上计算中,图像的标准差即代表噪声的前提是,图像区域内没有任何样品结构造成的亮度变化,否则标准差还应包含这个结构信息。为此,可以连续拍摄两张同样场景的图像,然后把两张图像相减。相减后的图像就只包含光子散粒噪声了。如果以 SD-subtract 代表差值图像的标准差,SD-image1和SD-image2代表单张图像的标准差,则以下公式成立。

因为两张图像设置完全相同,SD-image1 = SD-image2,所以。

那么,以上公式最后变为。

这样算出的 Gain 单位为 e–/ADU。
拍摄
通过公式⑤,我们知道只需要拍摄3张图像,就可以计算出 Gain 了。
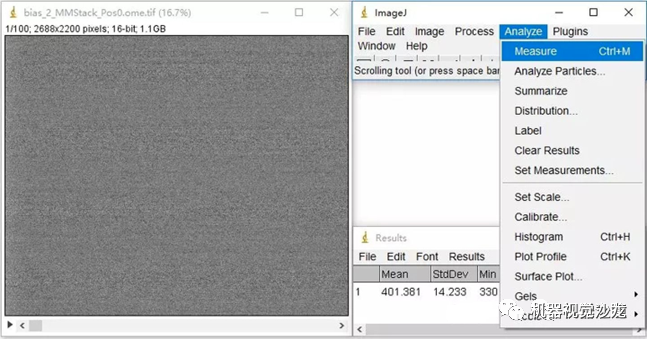
1.拍摄一张短曝光时间的黑图像(bias 图像)以计算offset。对同一台相机,偏置(offset)是一个常数,在相机完全无信号的情况下,将曝光时间设为0,拍摄一帧图像。
2.拍摄两张平均亮度大概在相机动态范围中间区域的图像。如果相机是12bit的,有4096 灰度级,那么图像的平均亮度最好在 2000 左右。这个可以通过调整曝光时间,或照明光强度来实现。基本要求是图像上不能有接近饱和(>4000 ADU,此时相机失去了线性度),或太暗( 《200ADU,此时相机没有工作在光子信号限制区,我们计算的条件不满足)的区域。如果您的相机是 14bit 的,那么灰度级是16384,上面的值需要按比例进行调整。
计算
1. 首先在 Image J 中打开 bias 图像,用 Analyze》measure,得到图像的 mean 值即为 Offset。
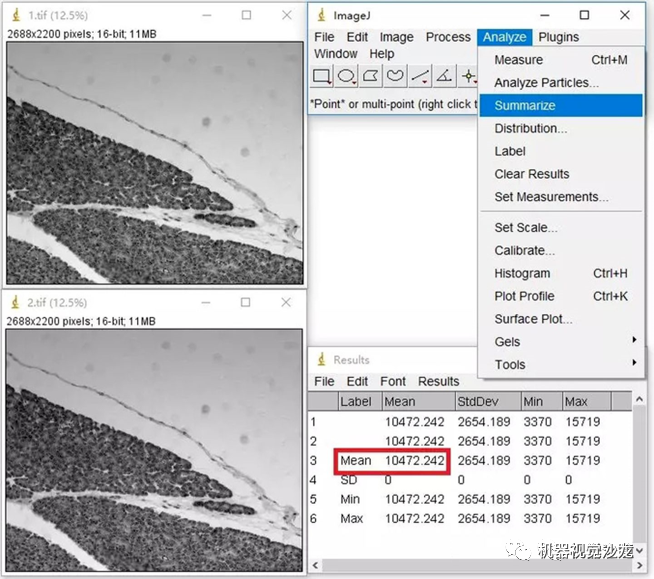
2. 接下来,打开另外两张图片,选择 Analyze 》 Measure 得到两张图片的平均灰度值,然后再用 Analyze 》 Summarize 就可以得到平均值 Mean-Image1, Image2。
3. 计算差异图像的标准差:选择 Analyze 》 Image Calculator,将两张图片进行 subtract,并勾选 32-bit (float) result,得到两张图片的差值图像。
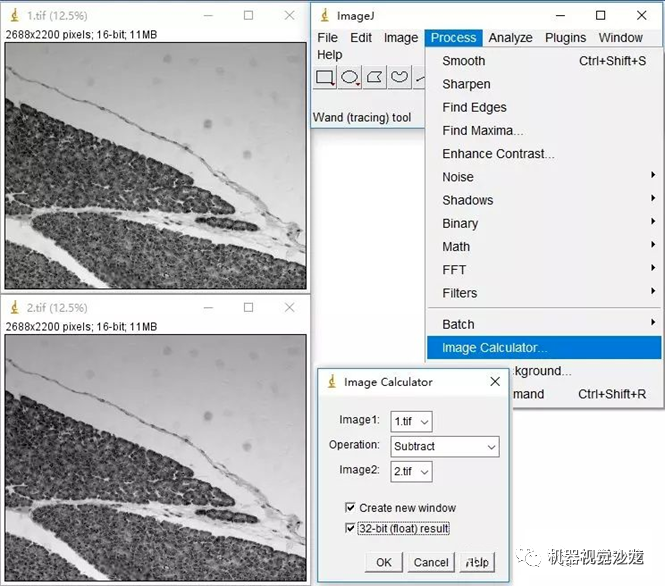
选择 Analyze 》 Measure 即可看到差值图像的标准差 SD-substarct。
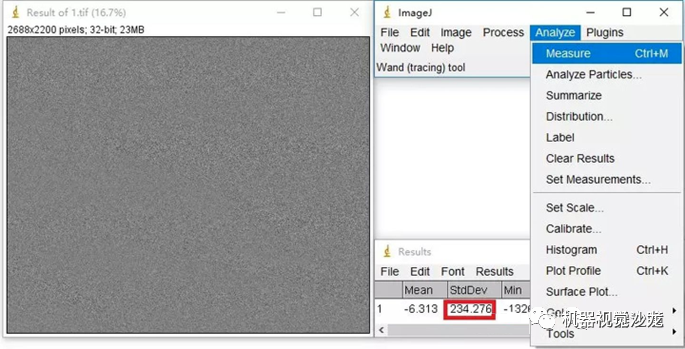
4. 然后代入前面的公式⑤,就可以算出系统增益,这里需注意减去偏置值。

也可以设置不同的曝光时间,重复上述步骤,用多次测量所得的值作图,通过拟合曲线来观察增益的线性度。
Gain
1.CCD/CMOS相机的Gain是出厂设置好的,不会改变;
2.EMCCD的EM Gain会随着使用老化衰减,正常使用7~10年左右,每隔一段时间应校准一次;
3.根据厂家不同,Gain 有多种表示方式。有些相机只有一个Gain,有些有三个Gain,有些连续可调(如0.5x-20x),或ISO100–ISO1200等等。以上测试,只对应当时设定的那个Gain有效。如果实际使用时,因为样品或成像方式变化,需要改变Gain的设置,对每个Gain都需要测量。建议在保存图像时,在文件名上反映出Gain的设置;
4.同一台相机,Gain的倍数越大,相机的满阱容量越小(更早饱和);
5.同一台相机,在软件中调节Gain的设置,图像亮度会变化,但实际探测到的电子数不变,因此信噪比变化不大;
6.Binning不影响Gain。
审核编辑 :李倩
-
CMOS
+关注
关注
58文章
6236浏览量
243443 -
相机
+关注
关注
5文章
1607浏览量
56047
原文标题:相机增益的测算
文章出处:【微信号:机器视觉沙龙,微信公众号:机器视觉沙龙】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

AD9801:电子相机的高性能CCD信号处理器
工业视觉相机的应用有哪些

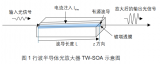
【SOA仿真5】SOA增益纹波计算

伺服电机增益详解
SOA增益饱和特性仿真分析

GraniStudio:相机标定例程

工业相机与智能相机的区别


带增益的 RX 分集 FEM skyworksinc




评论