 十大点云数据处理技术和点云应用汇总
十大点云数据处理技术和点云应用汇总
研究点云数据时,感觉无从下手?
看看这十大点云数据处理技术和点云应用汇总,换个思路学习了解点云。
点云 · 定义
简言之,在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”。包括三维坐标(XYZ)、激光反射强度(Intensity)和颜色信息(RGB)。
点云·数据处理技术
目前,点云处理涉及的技术主要为以下十个:
点云滤波(数据预处理)
点云关键点
特征和特征描述
点云配准
点云分割与分类
SLAM图优化
目标识别检索
变化检测
三维重建
点云数据管理
1
点云滤波(数据预处理)
点云滤波,顾名思义,即滤掉噪声。原始采集的点云数据往往包含大量散列点、孤立点,下图为滤波前后的点云效果对比。
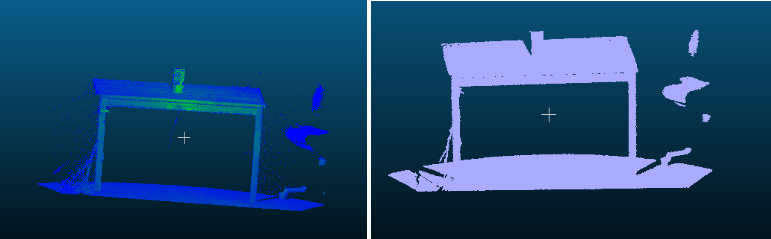
点云滤波的主要方法有:双边滤波、高斯滤波、条件滤波、直通滤波、随机采样一致滤波、VoxelGrid滤波等,这些算法都被封装在了PCL点云库中。
2
点云关键点
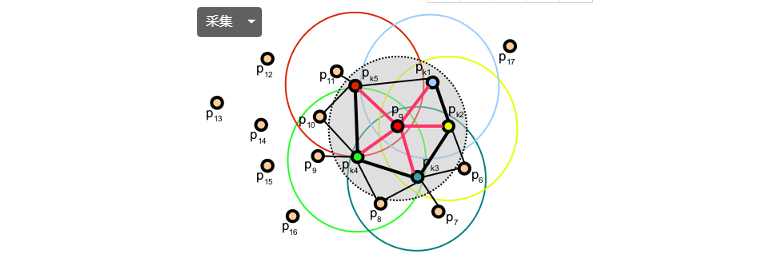
在二维图像上,有Harris、SIFT、SURF、KAZE这样的关键点提取算法,这种特征点的思想可以推广到三维空间。从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术。
常见的三维点云关键点提取算法有一下几种:ISS3D、Harris3D、NARF、SIFT3D, 这些算法在PCL库中都有实现,其中NARF算法是比较常见的。
3
特征和特征描述
如果要对一个三维点云进行描述,光有点云的位置是不够的,常常需要计算一些额外的参数,比如法线方向、曲率、文理特征等等。如同图像的特征一样,我们需要使用类似的方式来描述三维点云的特征。
常用的特征描述算法有:法线和曲率计算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image等。
PFH:点特征直方图描述子; FPFH:跨苏点特征直方图描述子,FPFH是PFH的简化形式。
4
点云配准
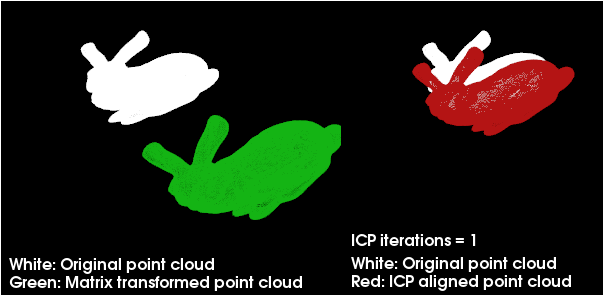
点云配准的概念类比于二维图像中的配准,只不过二维图像配准获取得到的是x,y,alpha,beta等放射变化参数,二三维点云配准可以模拟三维点云的移动和对齐,也就是会获得一个旋转矩阵和一个平移向量,通常表达为一个4×3的矩阵,其中3×3是旋转矩阵,1*3是平移向量。严格说来是6个参数,因为旋转矩阵也可以通过罗格里德斯变换转变成1*3的旋转向量。
常用的点云配准算法有两种:正太分布变换和著名的ICP点云配准,此外还有许多其它算法,列举如下:
ICP:稳健ICP、point to plane ICP、point to line ICP、MBICP、GICP
NDT 3D、Multil-Layer NDT
FPCS、KFPSC、SAC-IA
Line Segment Matching、ICL
5
点云分割与分类
点云分割又分为区域提取、线面提取、语义分割与聚类等。一般说来,点云分割是目标识别的基础。
分割:区域声场、Ransac线面提取、NDT-RANSAC、K-Means、Normalize Cut、3D Hough Transform(线面提取)、连通分析
分类:基于点的分类,基于分割的分类,监督分类与非监督分类
6
SLAM图优化
SLAM技术中,在图像前端主要获取点云数据,而在后端优化主要就是依靠图优化工具。而SLAM技术近年来的发展也已经改变了这种技术策略。在过去的经典策略中,为了求解LandMark和Location,将它转化为一个稀疏图的优化,常常使用g2o工具来进行图优化。 下面是一些常用的工具和方法:
g2o、LUM、ELCH、Toro、SPA
SLAM方法:ICP、MBICP、IDC、likehood Field、 Cross Correlation、NDT
7
目标识别检索
这是点云数据处理中一个偏应用层面的问题,简单说来就是Hausdorff距离常被用来进行深度图的目标识别和检索,现在很多三维人脸识别都是采用这种技术。
8
变化检测
当无序点云在连续变化中,八叉树算法常常被用于检测变化,这种算法需要和关键点提取技术结合起来,八叉树算法也算是经典中的经典了。
9
三维重建
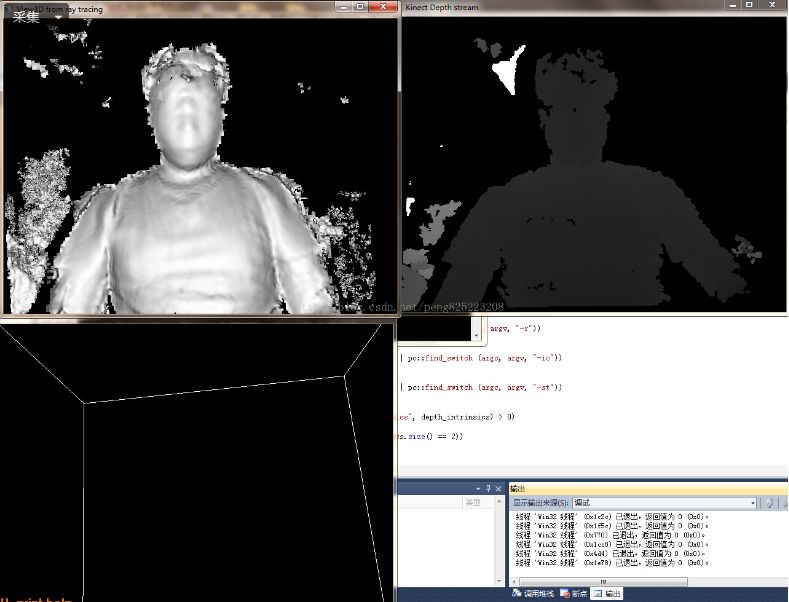
我们获取到的点云数据都是一个个孤立的点,如何从一个个孤立的点得到整个曲面呢,这就是三维重建。
在玩kinectFusion时候,如果我们不懂,会发现曲面渐渐变平缓,这就是重建算法不断迭代的效果。我们采集到的点云是充满噪声和孤立点的,三维重建算法为了重构出曲面,常常要应对这种噪声,获得看上去很舒服的曲面。
常用的三维重建算法和技术有:
泊松重建、Delauary triangulatoins
表面重建,人体重建,建筑物重建,输入重建
实时重建:重建纸杯或者龙作物4D生长台式,人体姿势识别,表情识别
10
点云数据管理
主要包含以下几方面:点云压缩,点云索引(KDtree、Octree),点云LOD(金字塔),海量点云的渲染。
点云 · 应用
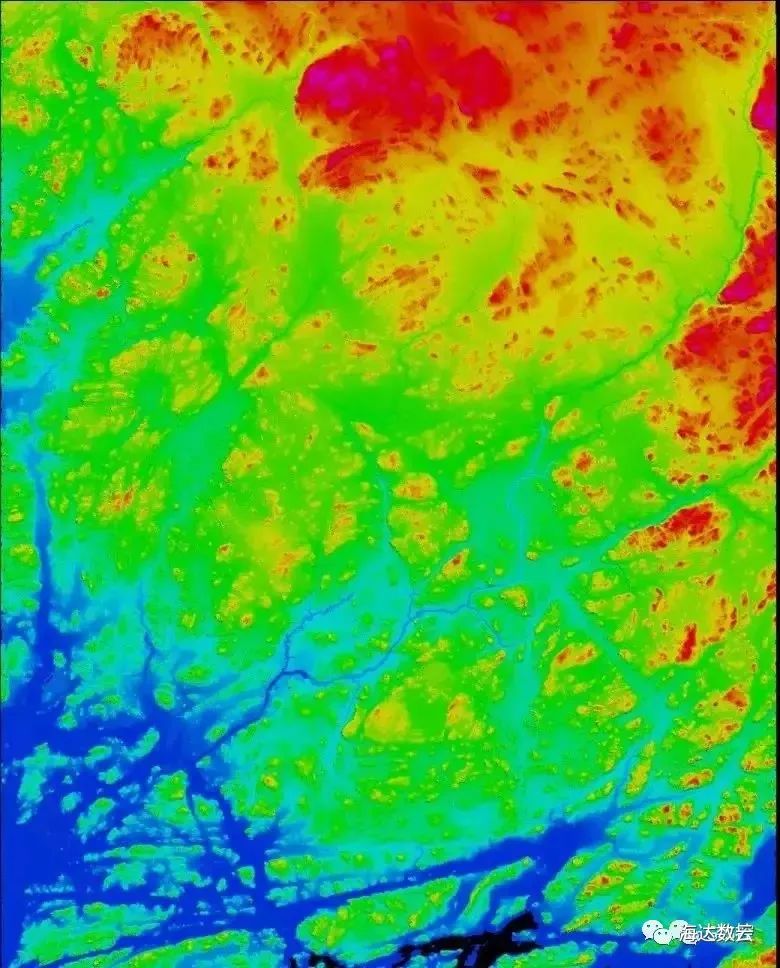
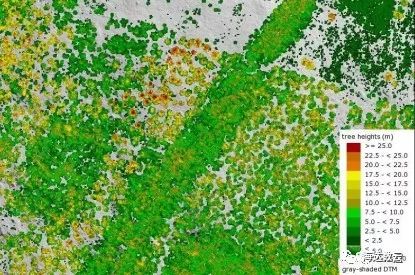
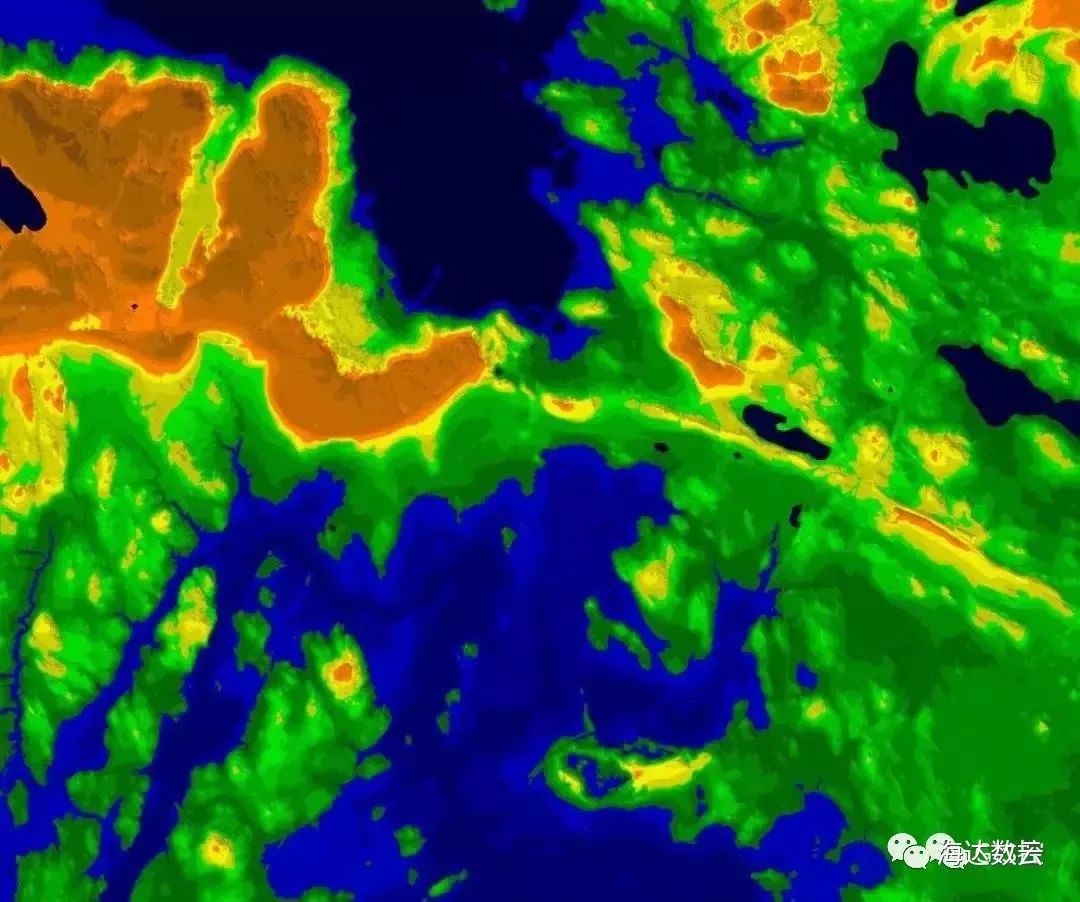
数字高程模型及等高线
利用获取的激光点云,通过去除部分噪声点并进行栅格化,可以快速生成高质量的数字表面模型(DSM).同时,如利用自动化方法结合人工编辑对激光点云进行进一步的滤波操作,滤除其中的非地面点并进行栅格化,可以得到高质量的数字地形模(DEM)。
等高线生产
等高线是在地图上描绘高程差异的传统且熟悉的方式。LiDAR产生一个点云,代表地面和上面的物体。首先要在美观程度上改变人们对等高线的看法,因为LiDAR 点云数据精度较高,以此生产的等高线能较好地反映出微地貌特征,但同时也会伴随产生等高线的抖动和比较多的气泡,与传统方式采集的等高线相比,在圆滑度和美观程度上就处于弱势。但实际上这正是其对地形的真实反映,是点云数据精度高的体现,所以我们要在一定程度上降低对圆滑度和美观程度的要求,既要美观,又要保证精度,这样才不失使用点云数据的意义。
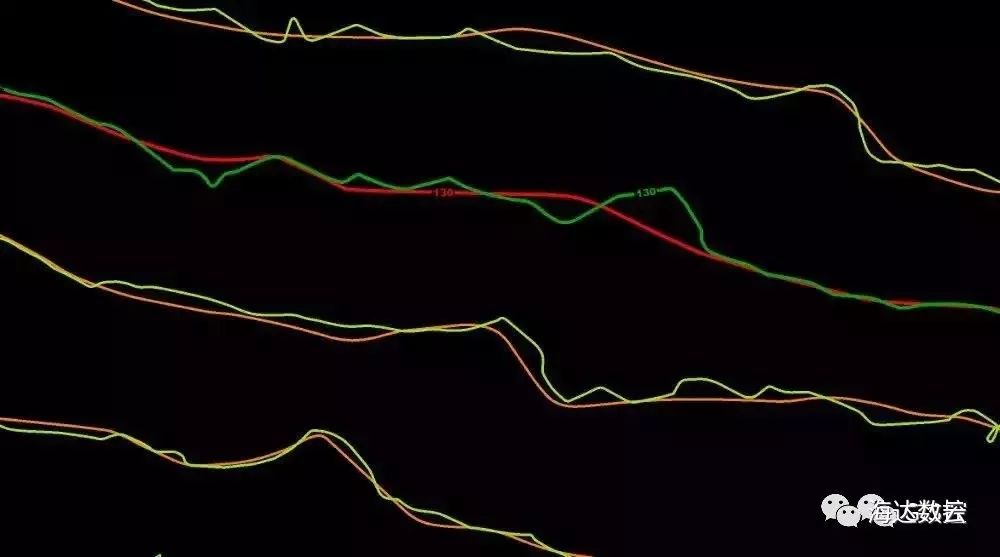
数学与制图等高线
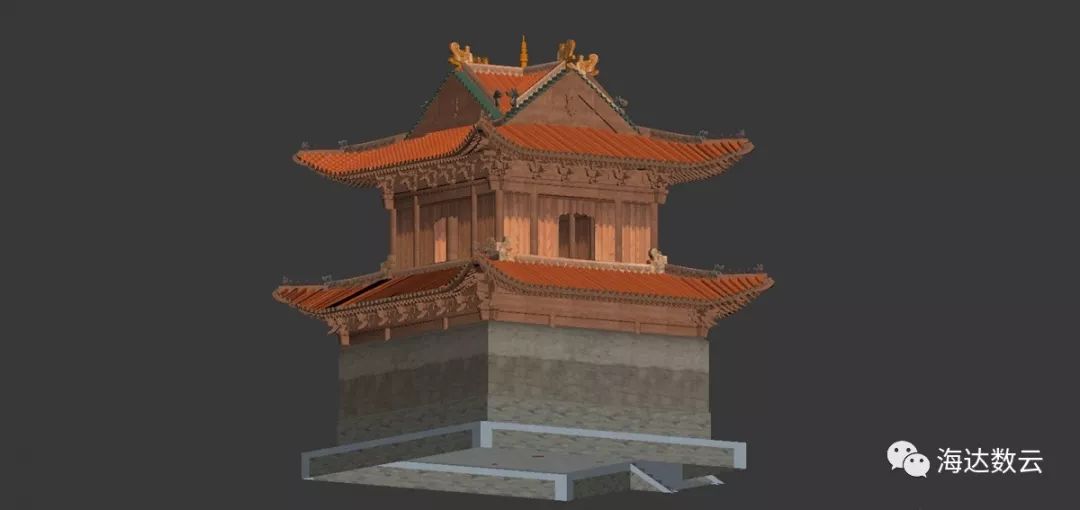
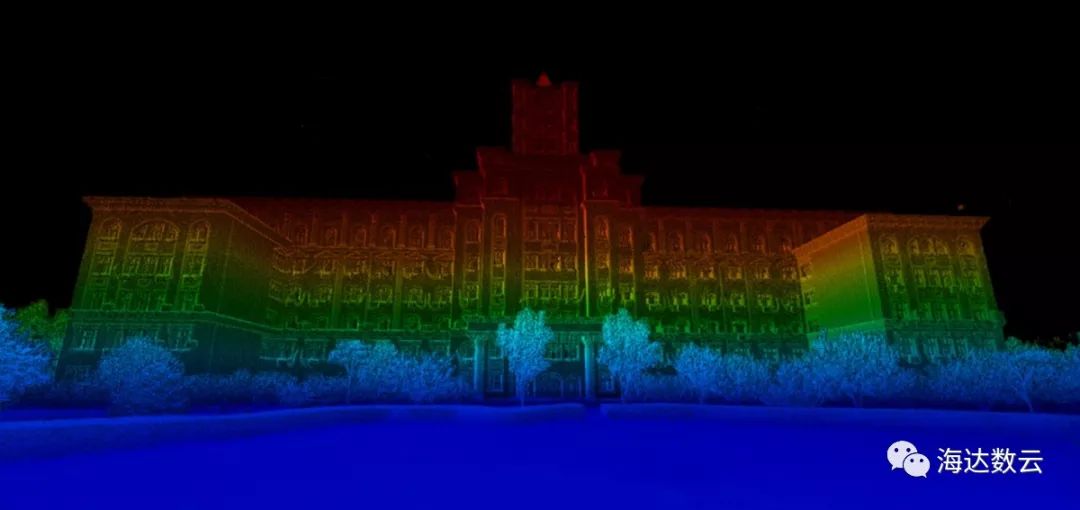
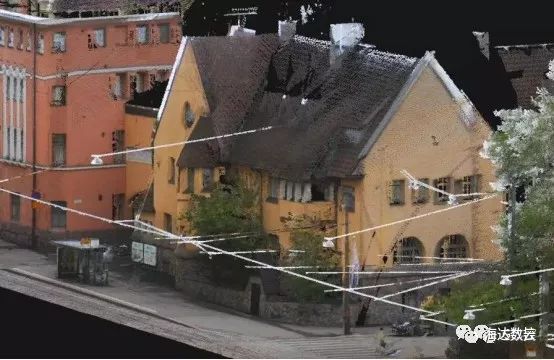
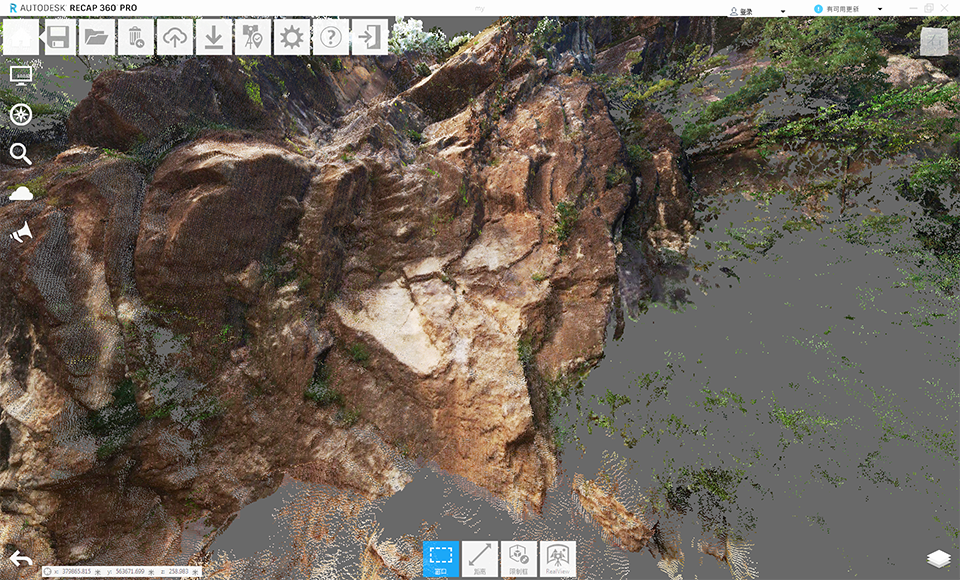
古建筑测量
古建筑测量的特殊性决定其不适用于传统的测量方式,而三维激光扫描的测量方式可以发挥其独特的优势,能在较短的时间内获取所测古建筑的三维数据,从而为后期修缮保护、模型存档等工作提供准确的数据支撑。
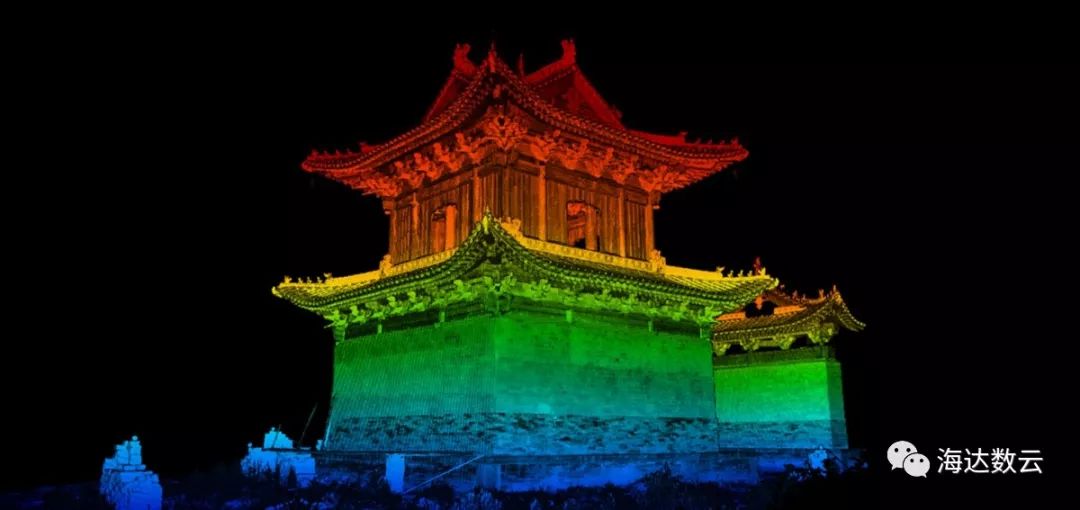
点 云 高 程 渲 染 图

点 云 强 度 渲 染 图
体积计算
机载激光雷达系统获取的高精度激光点云和地形三维模型,可以为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,大大减少工程勘察设计中的外业工作量,缩短工作周期。
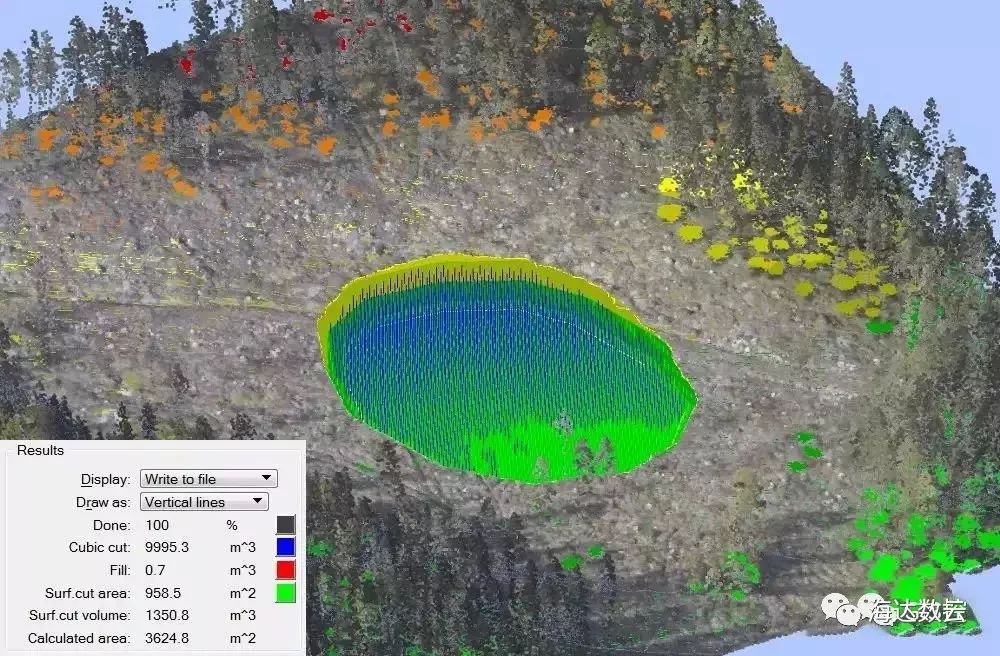
计划挖掘的数量计算
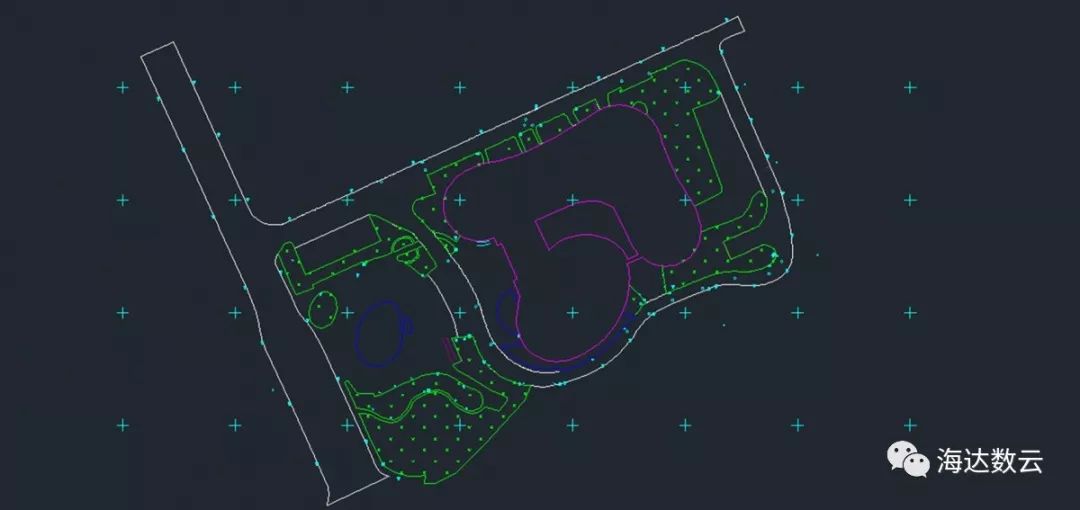
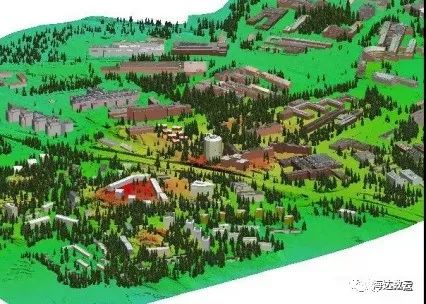
数字化园区
随着信息化整体加快以及物联网概念的提出,对园区智能化管理提出了更高要求。作为数字化的前提,精准的三维模型数据尤为重要,而点云处理对于精准空间数据的获取有着天然的优势。
点 云 高 程 渲 染 图

建 筑 三 维 模 型 图

建 筑 模 型 渲 染 效 果 图
地形图测绘
三维激光扫描巨大的优势在于可以快速扫描被测物体,不需要反射棱镜即可直接获得高精度的点云数据,这样可对真实世界进行快速二维矢量化。目前三维激光扫描技术已广泛应用于地形测量、防震减灾等领域。

点 云 高 程 渲 染 图
线 划 图 成 果
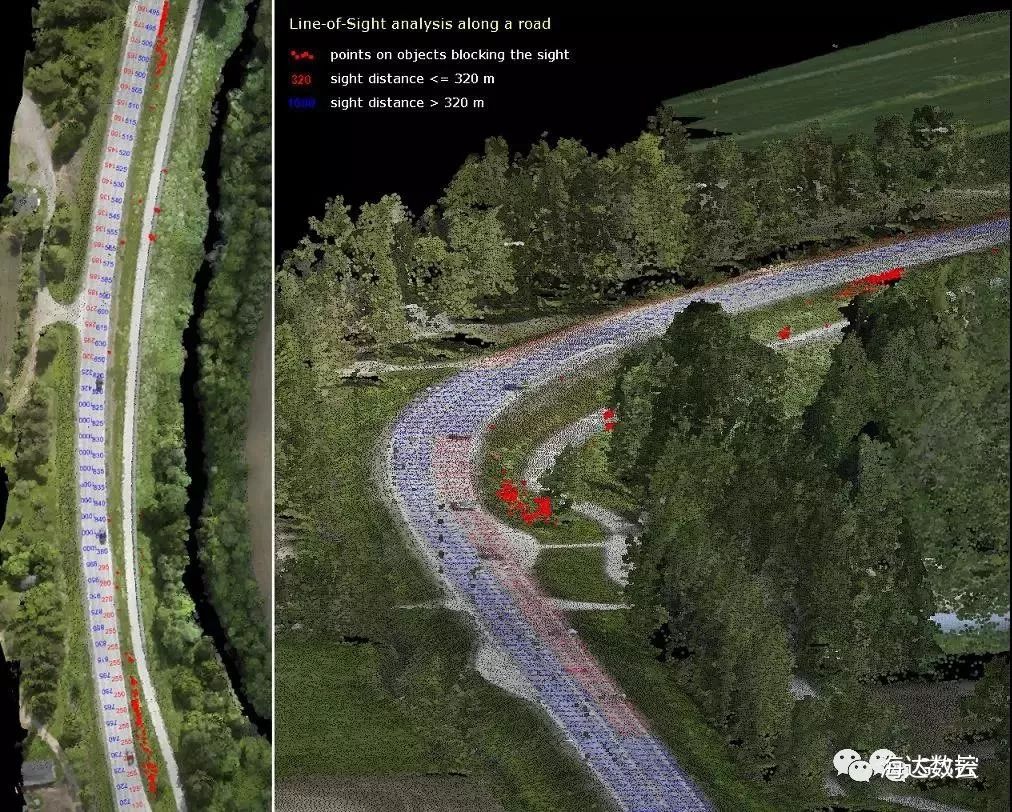
公路和道路测量
安装在汽车上的移动式LiDAR扫描仪或在直升机上操作的机载扫描仪可以提供密集的点云,可以非常准确地描绘高速公路,以及其周围环境和路面情况。使用同时拍摄的照片和使用GPS测量的控制点可提高准确度,并有助于补偿由高层建筑物和树木引起的GPS信号间隙。
路面的3D点云和道路环境支持与道路状况相关的监控任务。这可能包括:
·路面损坏,如车辙,裂缝,坑洼等
·道路横断面参数的计算
·表面超高
·路面上的水流
·油漆标记的形状和状况
·检测较长的凹陷
·生成道路设计任务的道路对齐几何
·与停止和超越距离的规定有关的视线分析
·桥梁,架空电线和隧道下的间隙区域
·沿路危险物体检测
·检测道路设施物体,如交通标志,电线杆,公交车站,防撞栏,隔音墙等。

路面损坏
道路视线分析

道路净空
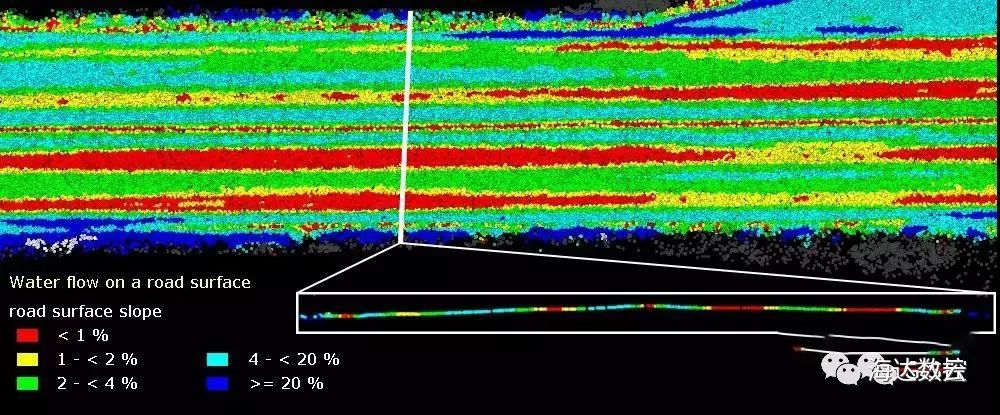
路面水流分析
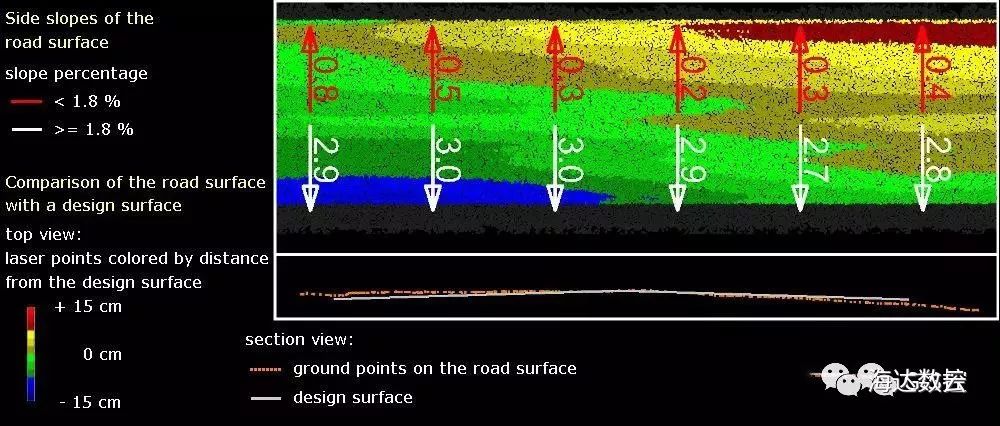
道路边坡,道路与设计界面
铁路和电车测量
移动式LiDAR传感器可以安装在铁路发动机、有轨车或有轨电车上的传感器平台快速获取铁路或有轨电车基础设施上的地理参考3D空间数据,由此产生的点云满足高精度要求,并提供轨道,架空电线,平台,桥梁,隧道屋顶和其他周围结构的详细和准确的空间信息。从铁路环境的点云衍生的信息可以包括:
从铁路环境的点云衍生的信息可以包括:
·导轨和架空电线的位置
·为设计任务推导铁路对齐几何
·视线分析
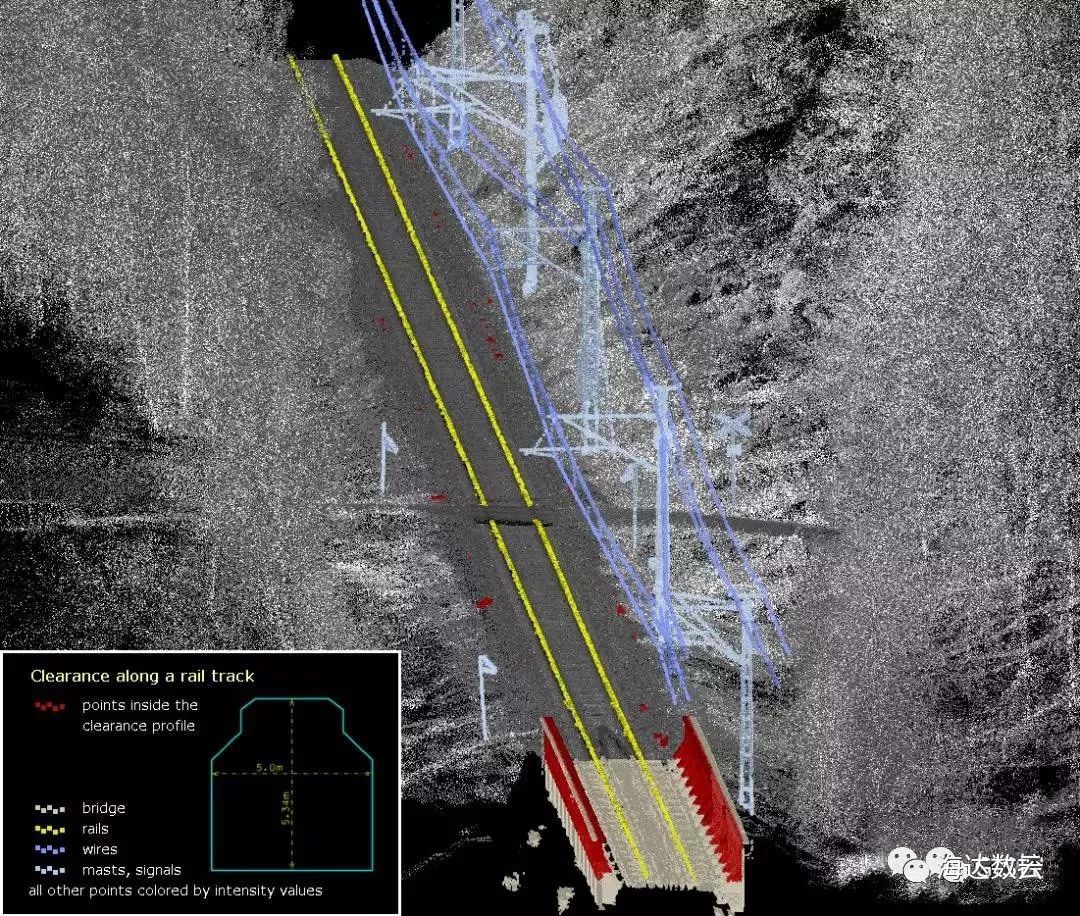
·在指定的净空断面内检测物体
·沿铁路发现危险物体
·检测铁路附属设施,如枕木,开关,标志,电线杆,塔架,隔音墙等

电车轨道和电线检测
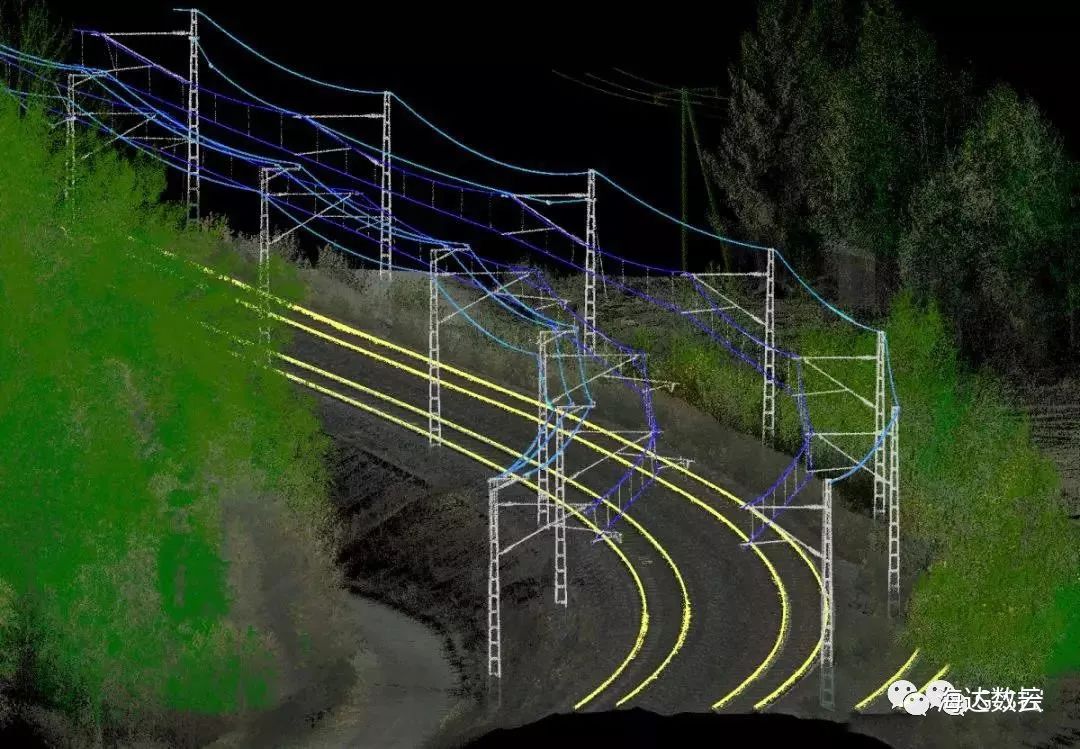
一条铁路的着色点云
电力线管理(选线、巡线)
电力线走廊通常位于不易进入的区域,因此走廊可能难以勘测。从低空机载平台操作的LiDAR系统即使在最崎岖的地形上也可以快速,经济地进入和测量,并且不会使人处于危险之中。它提供沿电力线走廊的电线,结构,植被和地面的准确位置信息。
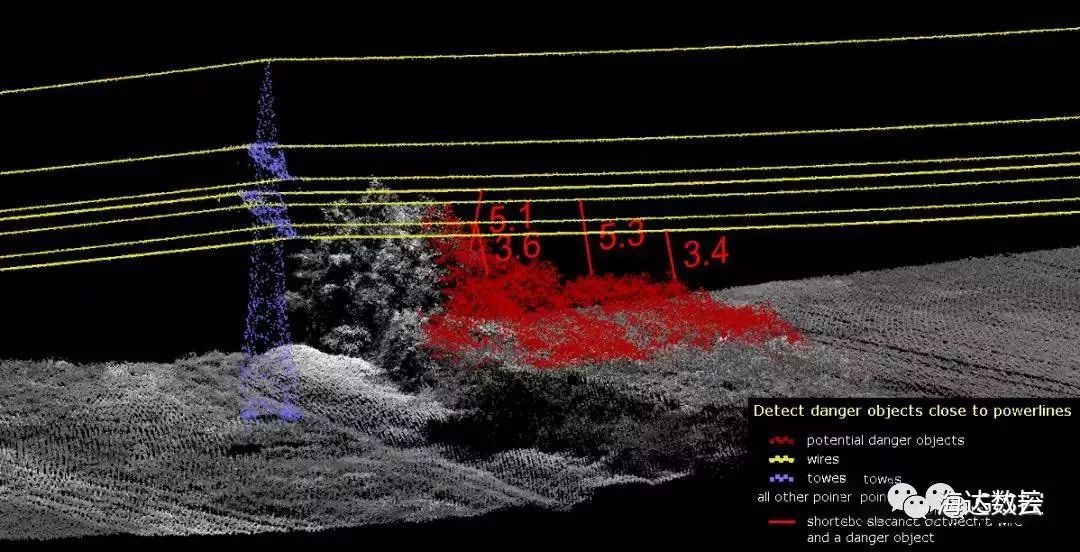
标注危险物体
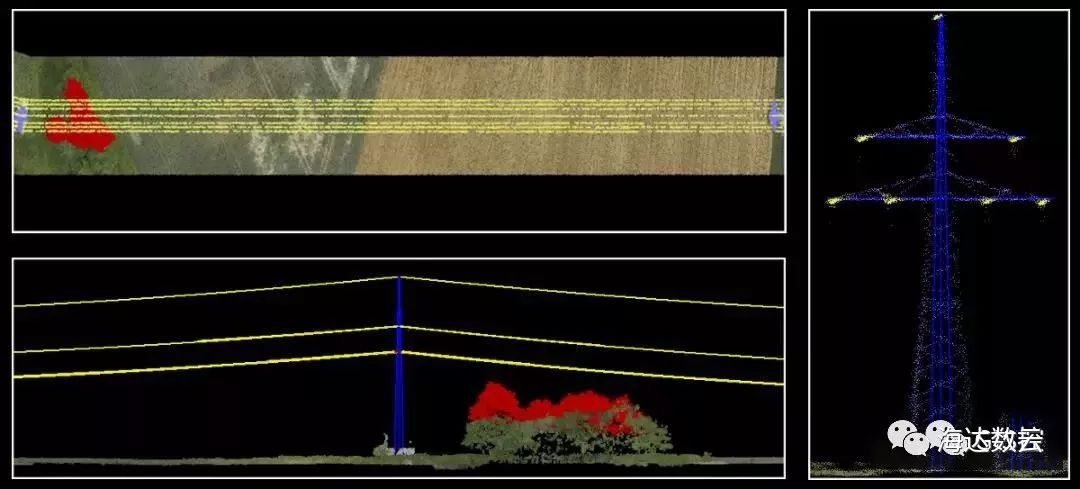
危险物体检测
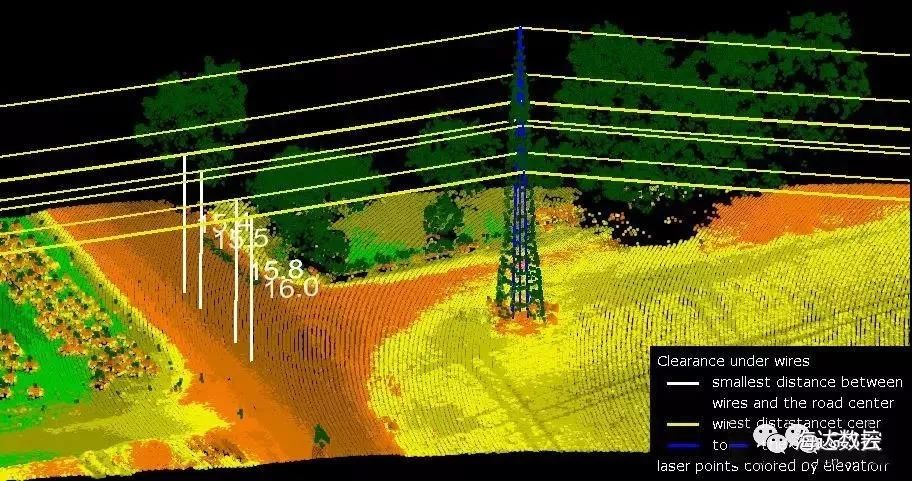
电力线与道路净空
管道走廊规划与维护
在规划天然气和石油管道的路线时,地面的形状,附近的建筑物和其他结构,人口以及对环境的影响考虑的一些事项。LiDAR提供了一种快速收集信息的方法,用于获取计划管道的走廊的完整图像,以及监测和维护现有管道走廊。
机载激光扫描是一种经济有效的方法,用于生成管道区域的地理参考3D点云。
隧道扫描
地下条件不是最适合进行测量的:它可能是黑暗,潮湿和多尘。在主动施工期间不能进行测量,但另一方面,工作不能长时间停止进行测量。然而,在构建新的地下空间或维护旧的地下空间时,有许多应用需要准确的隧道精确尺寸信息:必须监测喷涂在岩石表面的水泥表面层的厚度,需要评估结构的不连续性并记录,岩体和表面分析,变形和渗漏必须密切关注,并且需要监测施工质量。
地面静态或移动激光扫描为这些任务提供最快,最安全和最准确的数据收集方式。LiDAR不需要外部光线,设备足够坚固,可以应对地下条件。静态扫描仪是便携式的,移动扫描仪可以安装在汽车或火车或其他车辆上。它们可以高速生成密集的3D点云。即使在相当长的GPS停机期间,现代定位系统也能提供准确可靠的定位。可以使用移动扫描仪对铁路或高速公路隧道进行测量,而不会中断交通流量或在交通中间将人员置于危险之中。
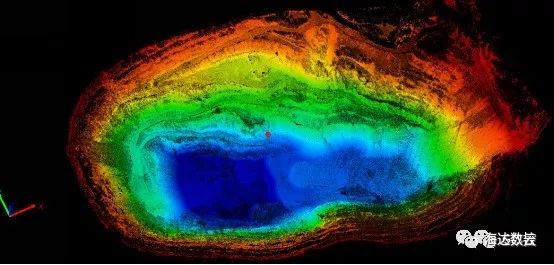
矿山测量
由于矿山地形复杂,采用全站仪和GPS等传统的测量手段进行高精度测绘工作往往费时费力。特别随着数字矿山概念的提出,矿山管理对空间三维信息的需求也显得更加迫切,三维可视化的管理模式已经成为数字矿山的主要内容之一,而目前常规的测量方式所获取的数据很难满足三维数字矿山的需要。近年来快速发展的三维激光扫描技术为解决复杂的矿山地形测量和数字矿山建设提供了新的技术手段。三维激光扫描技术具有高分辨率、高采样率以及非接触测量的优势,非常适合用于获取矿山的复杂表面和高危区域的空间三维信息。
森林调查
森林的机载LiDAR点云可用于估计森林的特征,例如树木的平均高度,树冠密度,生物量,林分体积和植被覆盖度。采用具有较小的激光束的扫描系统和完整的波形功能,以及可能用于生成支持数据的附加传感器(例如真彩色或红外图像),可以确定更多的信息,如高度,树冠直径,和物种。
衍生数据可用于监测森林生长,风暴或火灾造成的损害,树木采伐以及估计采伐时树木的财务价值。具体信息支持森林管理,以提高木材质量,减少浪费,增加利润和保持环境质量。有关森林树冠密度和生物量的信息进一步有助于估算森林火灾蔓延,从而支持消防员的工作和疏散任务。

立面测量
在建筑物立面测量领域,克服了传统建筑立面测量的局限性,通过面扫描方式快速获取详细的立面数据,使立面测量更为直观和高效。
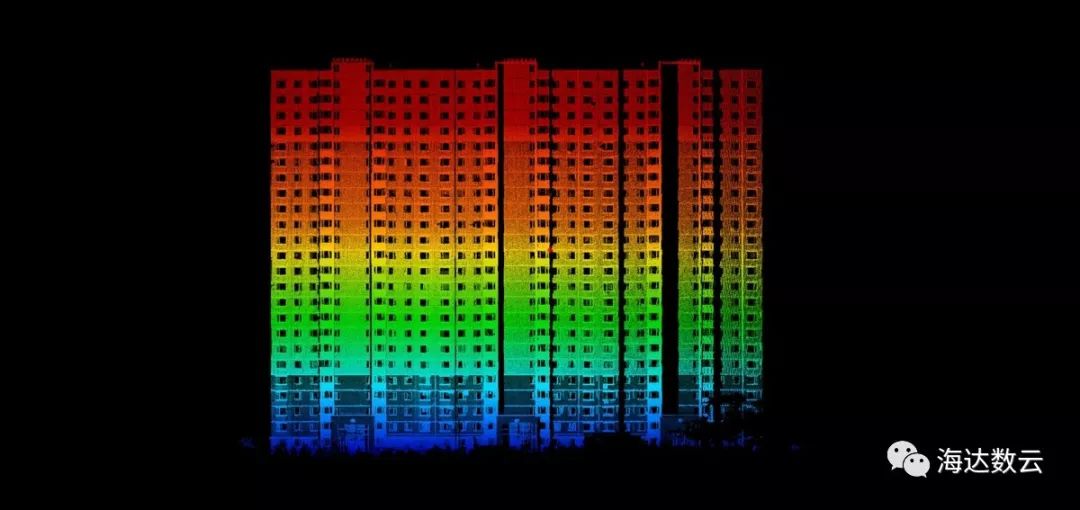
点 云 高 程 渲 染 图

点 云 强 度 渲 染 图
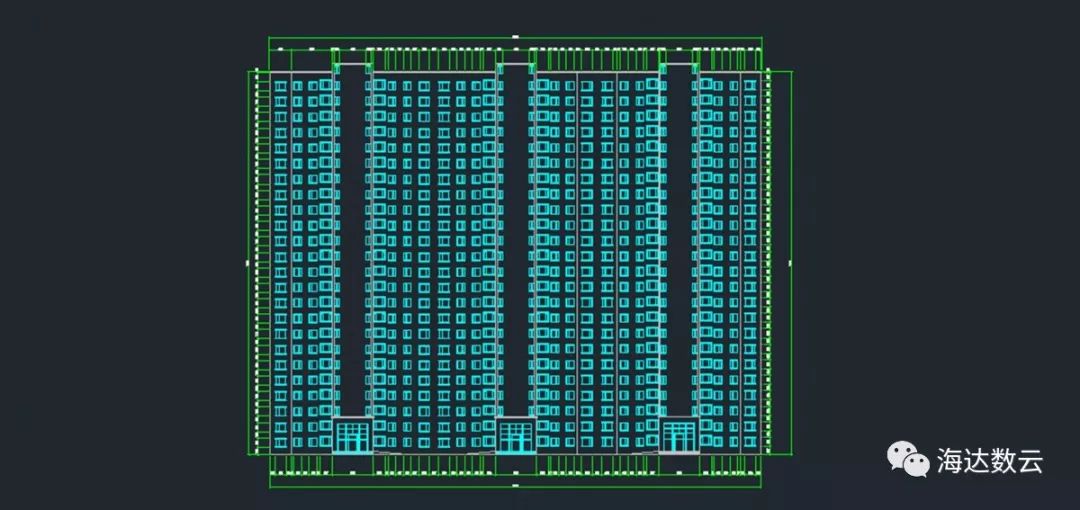
立 面 成 果 图
3D城市模型
3D城市模型有许多应用:城市规划,建筑,市政资产管理,安全和防御,紧急疏散计划,事故和灾难风险评估,定位服务,信息服务,虚拟现实,商业视觉效果和广告,电信,可视化,飞越动画,等等。

噪声传播分析
环境噪声是影响一个地区所有居民的一种污染形式。最关键的是机场,铁路,高速公路,主要道路交叉口,工业区,海港和类似地点。2002年,欧盟建立了环境噪声法案,以确定噪声污染水平并采取措施降低噪音。实施噪声法案的一个步骤是创建和发布噪声地图。计算噪声的传播并因此确定特定区域中的噪声水平的扩展需要数字地形模型(DTM)以及影响噪声传播的对象模型。
机载激光扫描是收集大面积3D数据的最快且最具成本效益的方法。激光扫描创建一个点云,描绘地面及其上的所有物体。
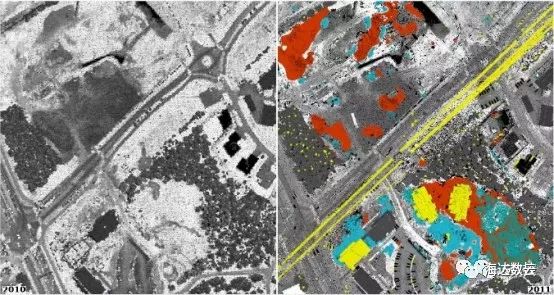
地质灾害应急与评估
LiDAR适用于测量多种物体,同样适用于检测自然或人为变化。将在不同时间点扫描的点云相互比较以发现它们之间的显着差异。
机载激光扫描是最快且可能是唯一的测量方法,能够收集遭受自然灾害或其他灾害的区域的3D数据,从而为事故发生后不久的损伤分析提供依据。
道路建模
城市道路作为连接城市不同功能区的空间纽带以及城市空间信息流的主要载体,其三维模型是数字城市不可或缺的重要组成部分。道路三维模型一般是由路面模型及其附属构造物组成,而三维激光扫描技术能快速获取详细道路面高精度点云数据,并以此为依据构建出更精细的道路模型。
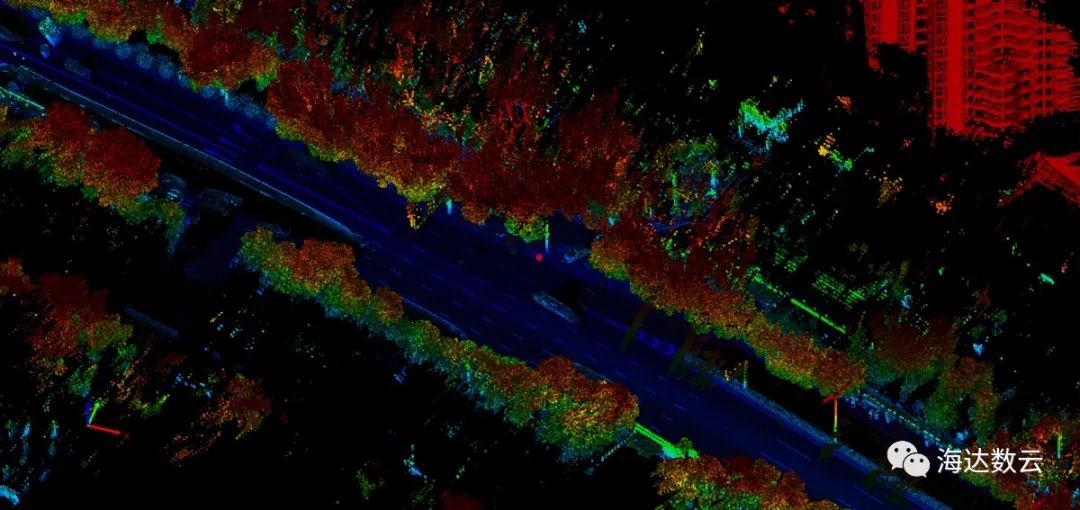
点 云 高 程 渲 染 图
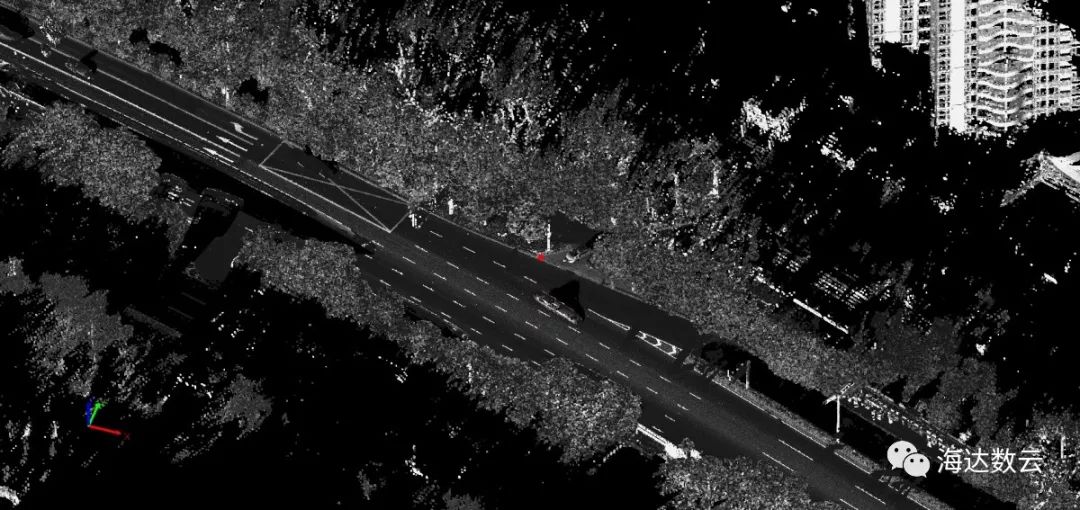
点 云 强 度 渲 染 图

道 路 三 维 模 型 图
洪水分析
新的欧盟洪水指令要求在2015年之前,如果海平面上升,河流泛滥或大雨暴雨,所有成员国都要绘制有洪水风险的区域。该指令指示各国制定洪水风险图并采取适当措施降低人身安全、环境、基础设施和财产遭受洪水破坏的风险。这需要这些区域的准确的高程模型,以确定在不同水位哪些区域容易发生洪水。机载激光雷达是从大区域捕获数据并生成精确地形模型的方法。安装在船上的移动扫描系统也已经过测试,用于扫描河岸和附近区域。
数字工厂
在工厂数字化的过程中要对工厂进行模型数字化,传统测量方法在测量结构复杂的工厂时,会产生巨大的工作量,在测量过程中会遗漏诸多细节。点云技术能够高精度、大范围的对工厂进行扫描,在短时间内获得厂房的三维点云及图像,并在三维点云基础上建模。大大降低了建模的难度,加快了建模的速度,能够1:1精确还原真实工厂。
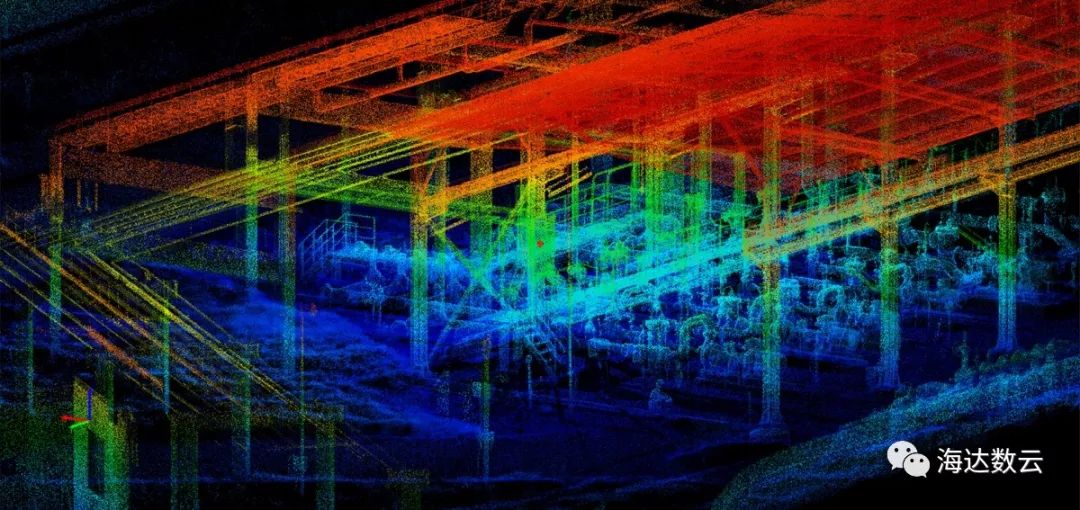
点 云 高 程 渲 染 图
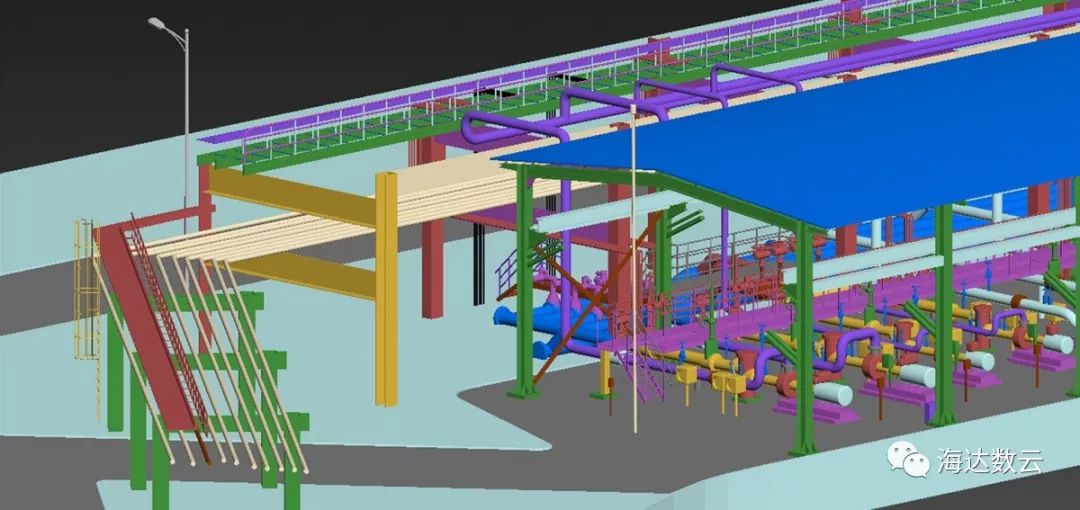
工 厂 三 维 模 型 图
审核编辑 :李倩
-
数据处理
+关注
关注
0文章
617浏览量
28668 -
PCL
+关注
关注
1文章
35浏览量
13726 -
点云
+关注
关注
0文章
58浏览量
3825
原文标题:【光电智造】十大点云数据处理技术梳理
文章出处:【微信号:今日光电,微信公众号:今日光电】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
HPLC通信与云计算的结合 HPLC通信信号处理方法
基于深度学习的三维点云分类方法

什么是三维点云分割
云计算与边缘计算的结合
输电线路激光雷达点云监测装置的功能特点和技术参数介绍
激光雷达点云数据包含哪些信息
LiDAR激光点云数据处理软件处理流程
中国信通院发布“2024云计算十大关键词”

友思特案例 | 自研创新!三维工件尺寸测量及点云处理解决方案

泰来三维|三维扫描服务_三维激光扫描仪测量山体滑坡点云建模
基于深度学习的方法在处理3D点云进行缺陷分类应用






 工商网监
工商网监
评论