 小型平行履带底盘的制作分享
小型平行履带底盘的制作分享
1.运动模式
小型平行履带底盘可以通过两侧履带的 差速运动 来实现前进、后退、原地转向、大半径转向等基本行驶功能。

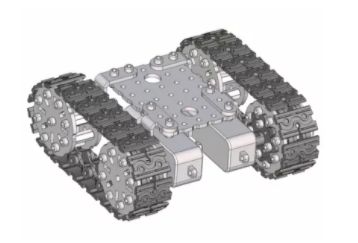
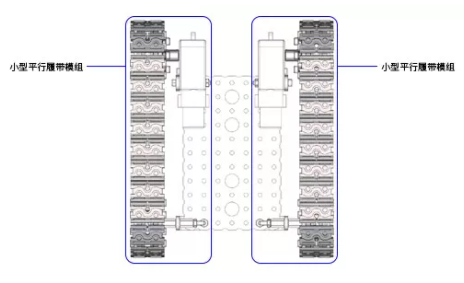
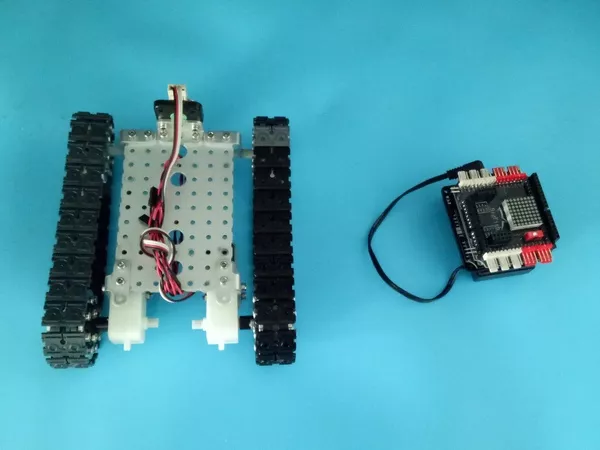
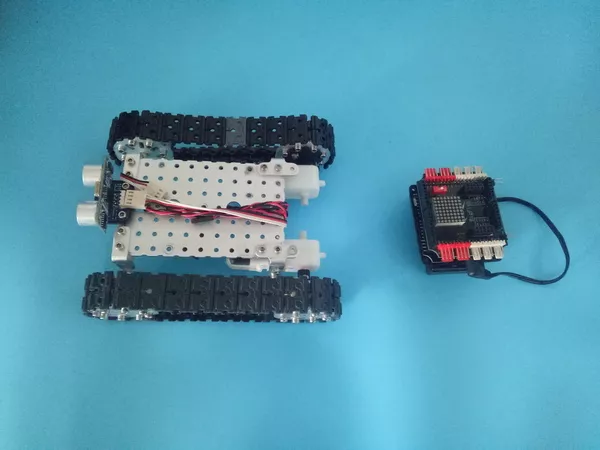
2.构成说明
该样机由两个 小型履带模组 构成,履带模组呈轴对称分布在车架上。
3. 运动功能实现
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

将直流电机接在两个直流电机接口上,两个直流电机接口的针脚号分别为(D5,D6)以及(D9,D10),并将主控板和电池在车身固定好。

3.2编写程序【完整代码请参考https://www.robotway.com/h-col-114.html】
前进功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ ------------------- 实验功能: 实现小车前进 ------------------------------------------- 实验接线: 左侧车轮接:D9,D10 | | .-------------------------. | | | |---. | | | 车头 | |---* | | *-------------------------* | | 右侧车轮接:D5,D6 ------------------------------------------------------------------------------------*/ void Forward(); // 前进 //程序初始化部分:设置电机引脚为输出模式 void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT);//将引脚10设置为输出模式 } //主程序部分:小车前进 void loop() { Forward(); } //封装小车前进动作子程序 void Forward() { digitalWrite( 5 , LOW ); //右轮前进 digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); //左轮前进 digitalWrite( 10 , HIGH ); } |
后退功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ ------------------- 实验功能: 实现小车后退 ------------------------------------------- 实验接线: 左侧车轮接:D9,D10 | | .-------------------------. | | | |---. | | | 车头 | |---* | | *-------------------------* | | 右侧车轮接:D5,D6 ------------------------------------------------------------------------------------*/ void Backward();// 后退 //程序初始化部分:设置电机引脚为输出模式 void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT);//将引脚10设置为输出模式 } //主程序部分:小车后退 void loop(){ Backward(); } //封装小车后退动作子程序 void Backward() { digitalWrite( 5 , HIGH ); //右轮后退 digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); //左轮后退 digitalWrite( 10 , LOW); } |
原地转向(向左转)功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ --------------------------------------- 实验功能: 实现小车差速自转【本示例为小车左转】 ------------------------------------------- 实验接线: 左侧车轮接:D9,D10 | | .-------------------------. | | | |---. | | | 车头 | |---* | | *-------------------------* | | 右侧车轮接:D5,D6 ------------------------------------------------------------------------------------*/ void turn_Left(); // 原地转向 //程序初始化部分:设置电机引脚为输出模式 void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT);//将引脚10设置为输出模式 } //主程序部分:小车差速自转[本示例为小车左转] void loop() { turn_Left(); } //封装小车自转动作子程序(本示例为左转) void turn_Left(){ digitalWrite( 5 , LOW ); //右轮前进 digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); //左轮后退 digitalWrite( 10 , LOW); } |
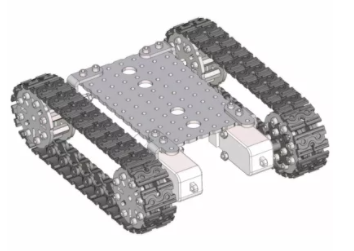
4.扩展样机
本样机很容易通过改变履带的长度,做出一些扩展,如下图所示的将履带长度缩短的样机。
5.资料清单
样机3D文件
例程源代码
资料下载详见 https://www.robotway.com/h-col-114.html
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28524浏览量
207552 -
底盘
+关注
关注
3文章
247浏览量
14697 -
智能小车
+关注
关注
87文章
549浏览量
81789 -
Arduino
+关注
关注
188文章
6472浏览量
187355
发布评论请先 登录
相关推荐
斜三角履带底盘的制作
1.运动功能说明 斜三角履带底盘可以通过两侧履带的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能。另外,倾斜的履带也可以使其具有良好的越障效果。 前进与后退

履带机器人 金属底盘
` 本帖最后由 威凯-智控 于 2012-8-14 23:28 编辑
今天给大家分享一个全金属的履带机器人底盘准备最履带机器人的朋友们,可以一起交流一下机器人疯狂爱好者 让思维沸腾起来 让智慧行动起来 共同创造机器人的精彩!
发表于 08-14 23:25
【NanoPi Duo开发板试用申请】基于NanoPi Duo的智能迷你履带车
:https://www.bilibili.com/video/av14166102/但履带小车可以实现的功能还比较少,而且不可控制,现在 今天看到NanoPi Duo这款超小型创客神器很心动,现在
发表于 09-21 15:36
履带底盘的结构部分
写在前面:看着网上那些履带底盘,怎么看怎么不舒服,还是决定自己做。这样就带来一个很大的问题,就是很多结构件都要用3D打印。我自己有3D打印机,下面不但会给出设计,还会给出实物照片。但是,对于没有3D
发表于 02-19 03:54

蓝牙遥控履带底盘行驶
1. 功能描述 本文提供的示例所实现的功能为:用手机APP遥控斜三角履带底盘样机实现移动,包括前进、停止、后退、原地左转、原地右转。 2. 电子硬件 在这个示例中,采用了以下硬件,请大家

履带差速移动机器人底盘平台
MID-01 是一款具有良好的稳定性和越野能力的中型履带机器人底盘,是一款平稳性的底盘,它可实现原地旋转,整车沿用经典的克里斯蒂式独立悬挂设计,8 组悬挂臂+自张紧悬挂系统,底盘重心较
发表于 12-23 14:44
•2次下载
小型双节履带底盘的制作
1.运动功能说明 双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过

正三角履带底盘的制作分享
1.运动功能说明 正三角履带底盘可以通过两侧履带的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能。同时,由于车身的正三角特性,它不惧怕前后方向上的翻车。 2.结构说明 该样机由

小型三节履带底盘的制作
双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过坑洼地面等功能。
小型平行履带底盘实现红外避障功能
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 近红外传感器 ,如果遇到障碍,机器人后退,否则机器人前进,实现机器人避障的效果。 2. 电子
小型平行履带底盘实现超声避障功能
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 超声波传感器 ,如果遇到障碍,机器人后退、转向,否则机器人前进,实现机器人避障的效果。 2.
小型平行履带底盘实现双灰度循迹功能
1. 功能说明 在小型平行履带底盘样机上安装2个 灰度传感器 ,实现机器人沿指定路线进行运动的效果。 2. 使用样机 本实验使用的样机为R026a样机。 3. 功能实现 3

MID-01履带差速移动机器人底盘
MID-01 是一款具有良好的稳定性和越野能力的中型履带机器人底盘,是一款平稳性的底盘,它可实现原地旋转,整车沿用经典的克里斯蒂式独立悬挂设计,8 组悬挂臂+自张紧悬挂系统,底盘重心较
发表于 12-23 09:42
•1次下载





 工商网监
工商网监
评论